

6 Обеспечение Защиты электроприводов
6.1 Защита от перегрузки и коротких замыканий
Плавкие предохранители, обеспечивающие быстродействующее срабатывание, применяются при внешних и внутренних коротких замыкания для защиты силовых вентилей полупроводниковых преобразователей.
Плавкий предохранитель выбирается исходя из следующих соображений:
Номинальное напряжение предохранителя не ниже номинального напряжения сети подключения:

Ток срабатывания предохранителя не ниже максимального тока оборудования:

Для двигателя передвижения портала эти параметры будут:


Для двигателя передвижения суппорта параметры:

Для защиты ПЧ двигателя передвижения портала выбираются предохранители TeSys FUSE DF2FGN10 с параметрами:


Для защиты ПЧ двигателей передвижения суппортов выбираются предохранители ПН-101 DEKraft-33-00-4 с параметрами:


Кроме того, ПЧ ATV630U22N4 имеет в комплекте автоматический выключатель GV2L10 с номинальным током отключения 6.3 А и током термического расцепителя 138 А; ПЧ ATV630U07N4 имеют автоматические выключатели GV2L07 с номинальным током 2.5 А и током термического расцепителя 33.5 А
6.2 Защита от перенапряжений
В комплекте с преобразователями частоты ATV630U07N4 и ATV630U22N4 идут пассивные фильтры VW3A46101. Их параметры указаны в таблице 8.
Фильтры обеспечивают уменьшение гармоник тока на стороне сети вырабатываемых ПЧ и обеспечивают лучшую защиту от перенапряжений.
Таблица 8 – Параметры фильтров VW3A46101
-
Номинальное напряжение
Номинальная частота
Номинальный ток
Потери
380 – 480 В
50 – 60 Гц
6 А
88 Вт

Рисунок 10 – Принципиальная схема пассивного фильтра ATV630U07N4
Кроме всего прочего, в соответствие стандарту МЭК/EN 61800-3 и требованиям ЕС по электромагнитной совместимости (ЭМС), на преобразователях частоты установлены входные фильтры подавления радиопомех категории C2 или C3.
7 Разработка системы управления мехатронной системой
Используемость скалярного управления заключается в его простоте, а область его применения наиболее распространена для приводов насосов и вентиляторов. Кроме того, скалярные преобразователи частоты используются в тех случаях, когда важно поддерживать определенный технологический параметр. Это может быть, например, давление в трубе. Изменение амплитуды, а также частоты напряжения источника питания действуют как основной принцип. Т.е. применяется правило U/f. Максимальный диапазон регулирования скорости составляет 1:10.
Присущая ему простота реализации - еще одна особенность скалярного метода. Есть и недостатки, заключающиеся в том, что невозможно точно контролировать скорость вращения вала. Другая особенность заключается в том, что преобразователь частоты со скалярным управлением на валу двигателя не позволяет регулировать крутящий момент.
Второй метод, используемый в преобразователях частоты, - векторный. Это способ управления синхронными и асинхронными двигателями, в котором не только генерируется гармонический ток (напряжение) фаз, но также регулируется магнитный поток, т.е. крутящий момент на валу двигателя. Когда нагрузку можно изменять с той же частотой во время работы, используется векторное управление, т.е. когда нет четкой взаимосвязи между крутящим моментом нагрузки и скоростью вращения, а также в случаях, когда требуется регулировка амплитуды частоты при номинальных крутящих моментах.
Системы векторного управления делятся на два класса: бессенсорные и закрытые. Диапазон позволяет указать использование определенного метода. Использование бессенсорных систем возможно, когда скорость изменения не превышает 1: 100, а точность обслуживания не превышает ± 0,5%. Для аналогичных показателей 1: 1000 и ± 0,01% соответственно распространено использование систем обратной связи.
Преимуществом векторного метода управления является скорость реакции на изменение нагрузки, а в низкочастотном диапазоне вращение двигателя отличается плавностью и отсутствием разрывов. Если есть датчик скорости, необходимо обратить внимание на измерение на валу при нулевой скорости номинального крутящего момента. Регулировка скорости выполняется при достижении высокой точности. Все эти преимущества становятся важными на практике.
Правильный способ управления двигателем зависит от технических требований электропривода. Для электроприводов с ограниченным диапазоном регулирования и без динамических режимов работы используется частотно-параметрический метод, при котором частота и действующее значение выходного напряжения выходного преобразователя регулируются в соответствии с заданной скоростью. В электроприводах с широким диапазоном регулирования скорости и высокими требованиями к динамическим характеристикам используются мгновенные значения трехфазной системы подачи напряжения и тока по принципу векторного управления. В случае электроприводов для управления механизмами вентиляторов и механизмами с фиксированной нагрузкой с малым диапазоном регулирования подходит скалярный метод управления, если нет необходимости в точном управлении переходными процессами или их регулировке в соответствующем состоянии.
Векторное управление частотным управляемым асинхронным электроприводом связано как с изменением частоты и значений тока переменных асинхронного двигателя, так и с относительной ориентацией их векторов в полярной или декартовой системе координат. Регулируя значения амплитуды переменных и углов между их векторами, АД полностью контролируется как в статистике, так и в динамике, что заметно улучшает качество переходных процессов по сравнению со скалярным контролем. Этот факт имеет решающее значение для выбора систем с векторным управлением.
7.1 СУЭП передвижения портала
Поскольку диапазон скоростей передвижения портала МГР большой скалярное управление не походит. Поэтому для этого привода будет использоваться векторное управление по потокосцеплению ротора.
На рисунке 11 показана структурная схема системы ПЧ-АД с управлением по потокосцеплению ротора.

Рисунок 11 – Структурная схема системы ПЧ-АД при ориентации координат x,y по потокосцеплению ротора.
Коэффициент электромагнитной связи ротора определяется:

Эквивалентное сопротивление цепи статора рассчитывается следующим образом:

Электромагнитная постоянная времени этой цепи:
Коэффициент обратной связи по току равен:

Постоянная времени интегрирования:

где
 –коэффициент передачи ПЧ;
–коэффициент передачи ПЧ;
Передаточная функция регуляторов тока представляется следующим образом:

Передаточная функция потокосцепления представлена ниже:

Электромагнитная постоянная времени цепи ротора рассчитывается:

Постоянная интегрирования ПИ-регулятора потокосцепления ротора:


Коэффициент обратной связи по потокосцеплению:

Максимальное потокосцепление:

При определении передаточной функции регулятора скорости необходимо учитывать, что регулятор скорости должен компенсировать влияние рабочего блока на формирование электромагнитного момента асинхронного двигателя. Для этого на выходе РС должен быть включен делитель, аналогичный системам двухфазного регулирования скорости двигателей постоянного тока. В этом случае передаточная функция регулятора скорости выглядит следующим образом:

где J∑ - суммарный момент инерции
электропривода, кг м2;
м2;
kос - коэффициент обратной связи по скорости, В·с.

7.2 СУЭП передвижениясуппортов
Поскольку диапазон скоростей приводов передвижения суппортов невелик, а точность не критична, управление можно использовать с относительно простым и распространенным методом управления: скалярным управлением.
При постоянном напряжении питания U1, когда частота f1 изменяется, магнитный поток двигателя также изменяется, потому что поток пропорционален значению U1/f1. Следовательно, с уменьшением частоты f1 и U1 без изменения магнитный поток увеличивается. Это приводит к насыщению стали двигателя, что приводит к резкому увеличению тока и перегреву. Увеличение f1, соответственно, уменьшает ток и крутящий момент IM. Следовательно, для поддержания высоких энергетических параметров управления необходимо изменять напряжение питания IM в зависимости от частоты двигателя и нагрузки одновременно с регулированием f1.
Выбор соотношения между частотой и напряжением источника питания IM основан на поддержании постоянной перегрузочной способности, равной Mk / Ms при работе на разных скоростях. Поскольку нагрузка не изменяется быстро при движении тележки, изменение напряжения должно соответствовать следующим условиям:

Формирование требуемых статических и динамических свойств асинхронного регулируемого электропривода возможно лишь в замкнутой системе регулирования его координат. Одной из основных схем скалярного управления является система ПЧ-АД с обратной связью по току статора, которая представлена на рисунке 12.
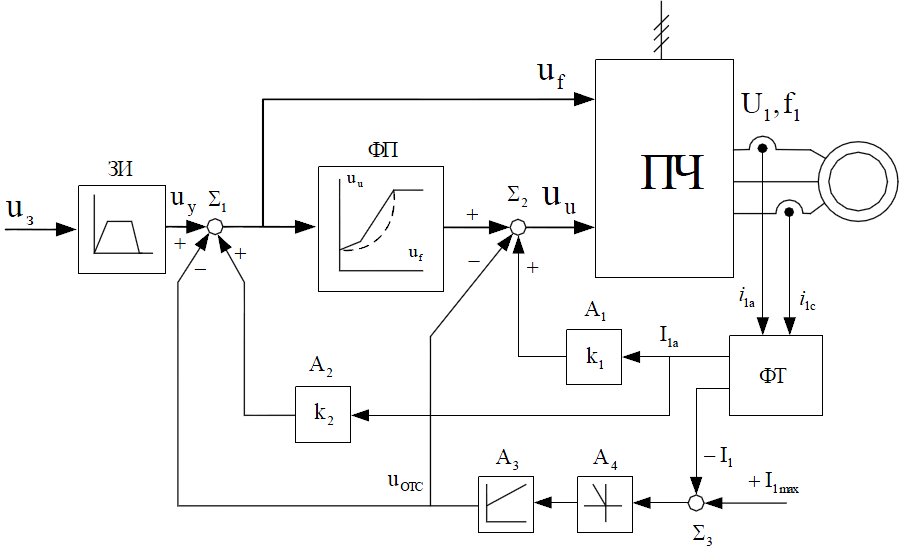
Рисунок 12 – Функциональная схема системы ПЧ-АД с обратной связью по току статора
ФТ - функциональный преобразователь тока. На основе измеренного тока статора генерируются выходные сигналы I1 и I1a пропорционально абсолютному значению тока статора и активной составляющей в этом токе, соответственно. Сигнал о значении тока статора I1 отправляется на функциональные устройства A1 и A2 в простых системах управления частотой для упрощения технических решений.
В системе с аналогичной обратной связью, механические свойства АД могут быть определены с перегрузочной способностью по крутящему моменту и почти нормальной жесткостью в диапазоне регулирования скорости ниже номинального при постоянной статической нагрузке.
Для защиты инвертора и двигателя от перегрузки по току используйте автоматический выключатель, работающий в блоках A3 и A4.
При приложении только к выходному напряжению инвертора, при условии, что контроллер A3 имеет интегрированный канал управления, из-за отрицательной обратной связи по току инвертор переходит из источника напряжения в состояние источника.
В статоре AД, регулируемом преобразователем частоты, независимо от частоты, установленной рядом с управляющим сигналом, производительность контроллера A3 из-за более высокого коэффициента обратной связи блока A1 будет сопровождаться снижением тока и крутящего момента двигателя — это эффект опрокидывания механических характеристик двигателя.
Такой режим работы с отсечкой практически ограничен влиянием на выходное напряжение преобразователя частоты и используется только в связи с одновременным воздействием на выходную частоту преобразователя.
Из-за отрицательного сигнала обратной связи от тока статора (более сильного, чем у блока A2), который достигает коллектора I1, вместе со стабилизацией тока его частота снижается и, следовательно, идеальной скоростью в номинальном режиме AД. Этот постоянный магнитный ток обеспечивает абсолютное скольжение и, следовательно, крутящий момент двигателя.
Чтобы выполнить IR-компенсацию, опорное напряжение увеличивается на значение, равное I1 R1. Это позволяет более точно поддерживать соотношение U1/f1 для статического компонента обмотки. Для этого определяется K1 (рисунок 7):

где Kот – коэффициент датчика тока.
Для двигателя передвижения портала коэффициент K1 определяется:

Для двигателей передвижения суппортов коэффициент K1 определяется:

Осуществление компенсации скольжения задания частоты и напряжения, ибо в рабочем диапазоне жесткость механической и электромеханической статорной характеристик практически равны, можно обеспечить использованием значения тока статора. Коэффициент K2 тогда будет определяться так:

Для двигателя передвижения портала коэффициент K2 определяется:

Для двигателей передвижения суппортов коэффициент K2 определяется:
