

8.1 Реализация модели передвижения портала
Реализация модели скалярного управления двигателем передвижения портала представлена на рисунке 18.
Реализация полной модели АД-САУ перемещения портала МГР представлена на рисунке 19.
Рисунок 18 – Структурная
схема системы ПЧ-АД при ориентации
координат x,y по потокосцеплению ротора,
реализованная в программе MatLab

Рисунок 19 – Модель работы
двигателя передвижения портала МГР


8.2 Реализация модели передвижения суппортов
Реализация модели скалярного управления двигателем передвижения суппорта представлена на рисунке 20.
Реализация модели АД-САУ передвижения суппортов МГР представлена на рисунке 21. Общая модель передвижения суппортов представлена на рисунке 22.
Рисунок 20 – Система
скалярного управления двигателем
передвижения суппорта МГР


Рисунок 21 – Модель работы
двигателей передвижения суппортов МГР

8.3 Реализация общей модели
Реализация модели АД-САУ работы приводов МГР представлена на рисунке 23.
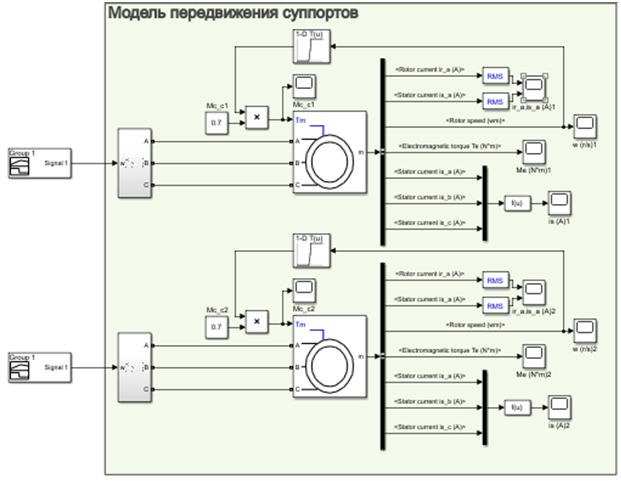
Рисунок 22 – Модель работы электроприводов машины газовой резки
9 Моделирование системы
По моделям, построенным в предыдущем разделе получены переходные процессы работы двигателей, которые представлены на рисунках 23 – 32.
9.1 Переходные процессы двигателя передвижения портала
Uос,
В
t, c
Рисунок 23 – Переходный
процесс разгона портала МГР:
Psi2.оп
– значение обратной связи потока;
I1y.от –
значение обратной связи тока статорной
обмотки; w.ос – значение
обратной связи скорости двигателя; w.з
– задание скорости двигателя.



Uос,
В
t, c
Рисунок 24 – Переходный
процесс торможения портала МГР:
Psi2.оп
– значение обратной связи потока;
I1y.от –
значение обратной связи тока статорной
обмотки; w.ос – значение
обратной связи скорости двигателя; w.з
– задание скорости двигателя.

9.2 Переходные процессы двигателя передвижения суппортов
Uос,
В
t, c
Рисунок 25 – Сокращенный
переходный процесс скорости двигателя
передвижения суппорта:
w.ос
– значение обратной связи скорости;
Is.ос – значение обратной
связи тока статорной обмотки; Wз
– значение задания скорости.

Uос,
В
t, c
Рисунок 26 – Переходный
процесс скорости двигателя передвижения
суппорта со вреза до начала реза с
номинальной скоростью:
w.ос
– значение обратной связи скорости;
Is.ос – значение обратной
связи тока статорной обмотки; Wз
– значение задания скорости.

Uос,
В
t, c
Рисунок 27 – Переходный
процесс скорости двигателя передвижения
суппорта с окончания реза до начала
возврата с номинальной скоростью:
w.ос
– значение обратной связи скорости;
Is.ос – значение обратной
связи тока статорной обмотки; Wз
– значение задания скорости.


Заключение
В выпускной квалификационной работе было выполнено проектирование электропривода для передвижения МГР.
Были рассчитаны и выбраны двигатели переменного тока 4A71B4Y3 и 4AA56B4Y3 для передвижения портала машины газовой резки и её суппортов; рассчитаны и построены тахограмма и нагрузочная диаграмма моментов двигателей. Двигатели проверены по нагреву по эквивалентному моменту и перегрузке.
С учетом номинальных данных двигателей и требований технологического процесса были выбраны преобразователи частоты ATV630U22N4 и ATV630U07N4 фирмы Schneider Electric. Для ПЧ выбран понижающий силовой трансформатор типа ТЛС(3)-10-10/0,4. Так же для преобразователей частоты выбраны элементы защиты и описаны комплектные элементы обеспечения качественной работы.
Реализована модель в программе MATLAB работы передвижения портала и суппортов машины газовой резки и получены переходные процессы при работе двигателей в соответствии с тахограммами.