

Статика и кинематика / Теоретическая механика
.pdf
|
|
|
|
|
|
|
|
31 |
Момент силы F |
относительно произвольной точки А - это вектор |
|||||||
M A (F ), определяемый следующим образом: |
||||||||
• M A (F )= AB × F ; |
|
|||||||
|
r |
r |
|
|
|
r |
|
r |
|
|
|
|
|||||
• |
M A |
(F ) |
= |
AB |
|
F |
sin (AB, F ) ; |
|
|
|
|
|
|
|
|
|
|
•вектор M A (F )перпендикулярен плоскости треугольника ABC;
•вектор M A (F ) направлен так, что с его конца вращательный эффект силы F наблюдается в положительном направлении (против хода часовой стрелки).
10. Момент силы относительно оси.
Момент силы относительно оси - это скалярная величина, равная моменту проекции силы F на любую плоскость, перпендикулярную оси, вычисленному относительно точки пересечения этой плоскости с осью, как момент относительно точки на плоскости (рис. 1.12).
Fxy = прxOy F
M z (F )= M O (Fxy )= ±Fxy h1
Момент считается положительным, если с положительного конца оси Oz видно, что сила стремится повернуть тело против часовой стрелки.
Момент силы относительно оси равен нулю, если линия действия силы параллельна оси или пересекает ее, то есть если сила и ось лежат в одной плоскости.
Связь между моментом силы относительно точки и относительно оси определяется следующей теоремой: момент силы относительно оси равен проекции на эту ось вектора момента силы относительно любой точки, лежащей на этой оси.
Таким образом, момент силы F относительно оси Oz (рис. 1.12) равен проекции вектора на ось Oz .
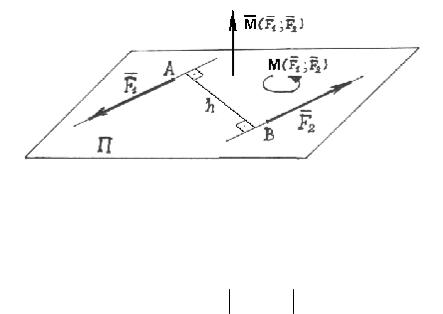
11. Пара сил. Пара сил - это система из двух сил, которые имеют параллельные линии действия, равны по абсолютной величине и направлены в противоположные стороны (рис. 1.13).
Плоскость П, в которой лежат эти силы, называется плоскостью действия пары. Расстояние между линиями действия сил пары называется плечом пары. Силовое воздействие пары характеризуется ее моментом, называемым моментом пары.
32
(F1; F2 ) - пара сил.
Рис. 1.13
Модуль момента пары равен произведению модуля одной из сил, составляющих пару, на плечо пары.
M (F1 ; F2 ) = F1 h = F2 h
Если пара рассматривается в пространстве, то момент пары есть вектор, направленный перпендикулярно плоскости действия пары в ту сторону, откуда видно, что пара стремится повернуть тело против часовой стрелки.
Если пара рассматривается на плоскости, то момент пары – это скалярная величина, которая считается положительной, если пара стремится повернуть тело против часовой стрелки.
Основные свойства пары сил определяются следующими теоремами: Теорема об эквивалентности пар. Не изменяя оказываемого на тело действия, пару сил можно заменить любой другой парой, лежащей в той же плоскости и имеющей тот же момент. Следствие 1: у данной пары можно произвольно менять модули сил и длину плеча, оставляя неизменным момент пары. Следствие 2: пару можно переносить в плоскости ее дейст-
вия.
Теорема о переносе пары в любую плоскость, параллельную плоскости пары. Не изменяя оказываемого на тело действия, пару сил можно перенести в любую плоскость, параллельную плоскости заданной пары.
Из этих двух теорем следует, что вектор момента пары является вектором свободным, то есть он не «привязан» к конкретной точке твердого тела, и его можно перемещать куда угодно в пределах тела.
Теорема о сложении пар.
Систему пар сил, действующих на твердое тело, можно заменить одной парой с моментом, равным геометрической сумме моментов заданной системы пар. Для этого все векторные моменты пар надо перенести в одну
33
точку, а затем сложить их по правилу сложения векторов.
12. Основные виды связей и их реакций.
Аксиома 4 (о связях). Твердое тело можно освободить от связей, заменив их реакциями.
Каждая механическая связь представляет либо тело, либо механическое устройство, которое накладывает какие-либо ограничения на перемещение рассматриваемого тела в пространстве. При этом, в зависимости от вида связи, некоторые перемещения запрещены, а некоторые - разрешены. Это обстоятельство позволяет заранее, не находя численных значений силовых факторов действия связи, указать на некоторые качественные их особенности, как например, направления. Правило, которому необходимо следовать при замене связей силами реакций, заключается в следующем: реакция связи в общем случае может состоять из двух силовых факторов - силы, приложенной в точке наложения связи, и пары сил.
Если связь запрещает поступательное перемещение тела, появляется сила реакции, направление которой противоположно запрещенному перемещению. Если связь запрещает поворот тела, то возникает пара сил реакции связи, которая обеспечивает это запрещение, при этом вектор момента пары будет направлен вдоль оси запрещённого поворота. Ниже приведены некоторые виды связей, которые встречаются в технике. На рисунках приведены расчетные схемы этих связей и показано, как определить их реакции.
12.1.Некоторые связи и их реакции на плоскости.
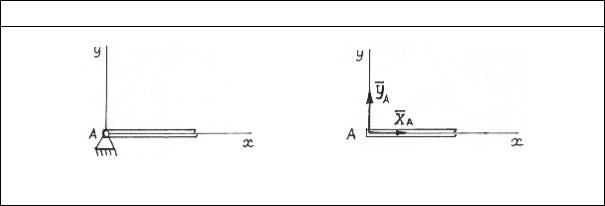
1.Шарнирно-неподвижная опора (рис. 1.14.)
Рис. 1.14
34
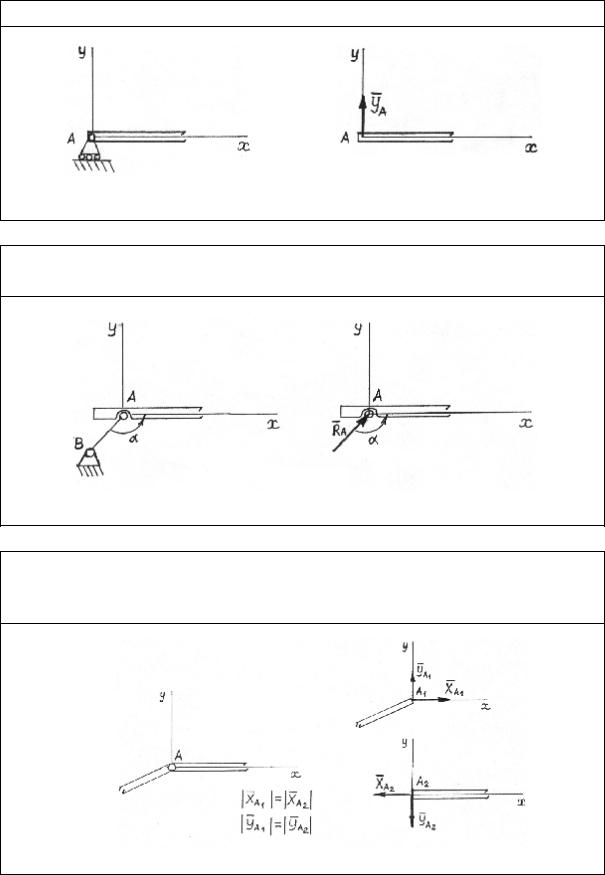
2. Шарнирно-подвижная опора (каток). (Рис. 1.15.)
Рис. 1.15
3. Тонкий невесомый стержень с шарнирами на концах (серьга или стержневая связь). (Рис. 1.16.)
Рис. 1.16
5.Разделение двух тел, связанных шарниром (рис. 1.17).
Всоответствии с третьим законом Ньютона силы, с которыми два тела действуют друг на друга, равны по модулю и противоположны по направлению.
Рис. 1.17
35
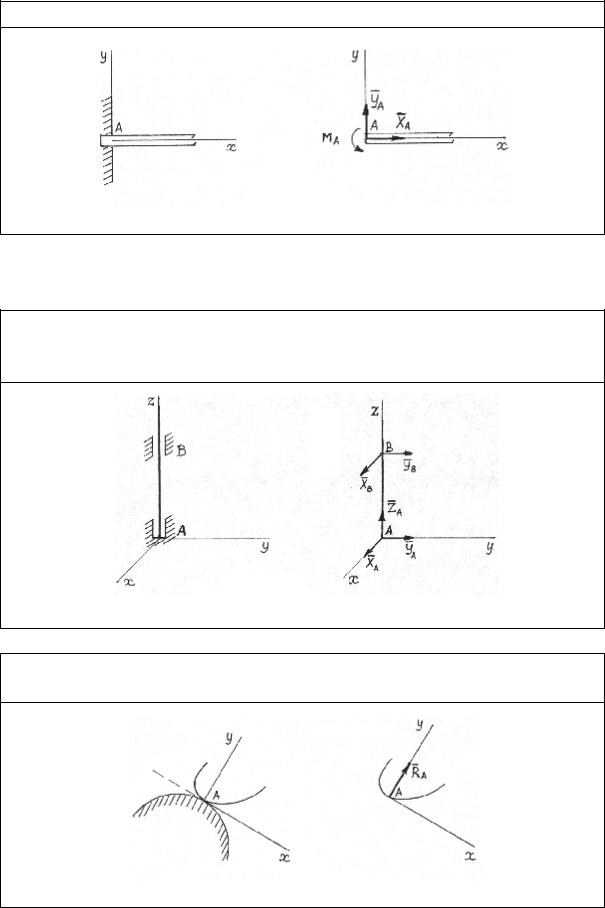
6. Жёсткая заделка на плоскости (рис. 1.18)
Рис. 1.18
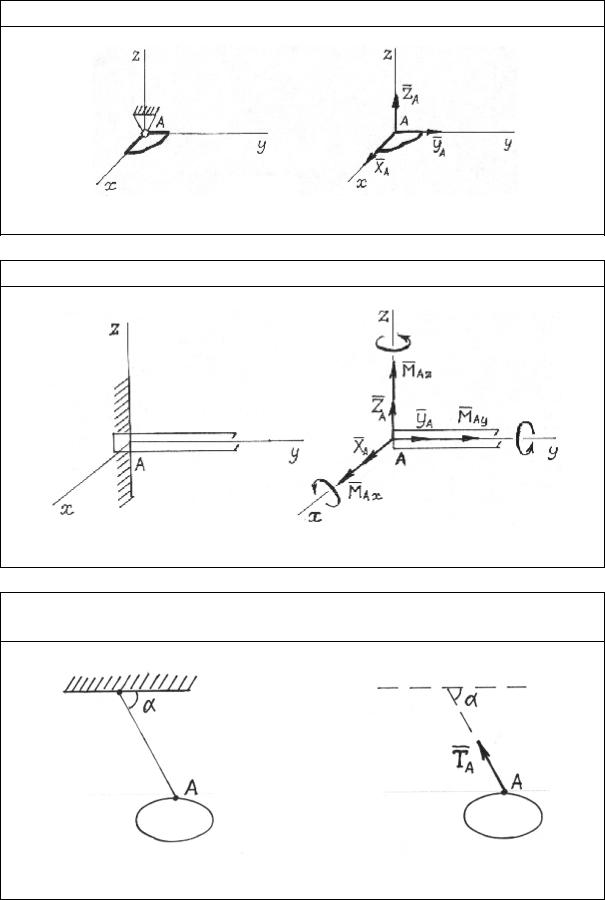
12.2. Некоторые связи и их реакции в пространстве.
7. Подшипник (B) и подпятник (A) в пространстве (рис. 1.19).
Подпятник, в отличии от подшипника, фиксирует вал не только в радиальном направлении, но и в осевом.
Рис. 1.19
4. Гладкая опорная поверхность (рис. 1.20).
Реакция направлена по нормали к поверхности.
Рис. 1.20
36
8. Сферический шарнир (шаровая опора). (Рис. 1.21)
Рис. 1.21
9. Жесткая заделка в пространстве (рис. 1.22)
Рис. 1.22
10.Гибкая невесомая нерастяжимая нить (рис. 1.23)
Реакция направлена вдоль нити.
Рис. 1.23
37
13. Основные теоремы статики.
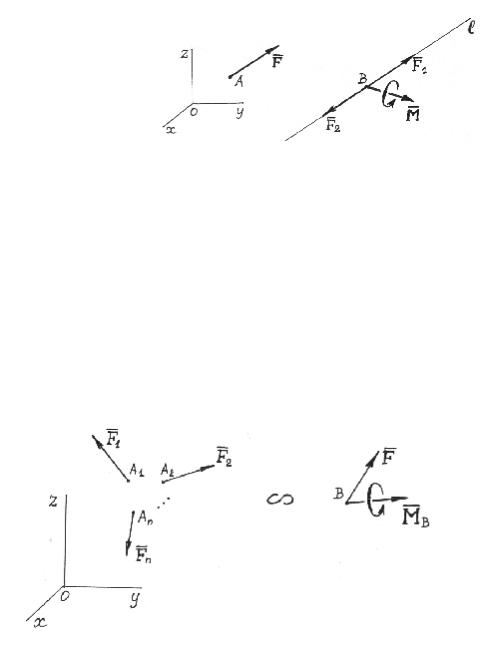
1. Теорема о параллельном переносе силы.
Силу, как вектор, можно параллельно перенести из одной точки тела в другую, добавив при этом пару сил с моментом, равным моменту исходной силы относительно точки переноса (рис. 1.24).
Сила F1 , приложенная в точке B, и пара сил с моментом M оказывают такое же воздействие, что и сила F , приложенная в точке А.
l |
F |
|
|
|
|
|
|
|
r |
= |
r |
= |
r |
|
|
F |
F |
F |
|
|
|||
|
1 |
|
2 |
|
|
|
|
|
r |
|
r |
|
|
|
|
F = −F |
|
|
|
|
|||
r 1 r |
2 |
|
|
|
|
||
(F1; F2 ) ~ 0 |
r |
r r |
|||||
|
r |
r |
r |
||||
(F ) ~ |
(F, F1 |
, F2 ) ~ |
(F1, M ) |
||||
|
r |
r |
r |
|
|
r |
|
M = m(F, F2 )= mB (F )
Рис. 1.24
2. Теорема о приведении произвольной системы сил к любому центру (теорема Пуансо). Произвольную систему сил можно привести к любому центру и заменить главным вектором, равным геометрической сумме всех сил, и главным моментом, равным сумме моментов всех сил, вычисленных относительно центра приведения.
Пусть точка В - центр приведения системы сил F1 , F2 ,..., Fn .(рис. 1.25).
Рис. 1.25
Воспользуемся теоремой о параллельном переносе сил. Перенесем
38
все силы в точку В, добавив соответствующие моменты. Сложим все силы, получим главный вектор системы сил. Сложим все моменты, получим главный момент системы сил относительно точки B
r |
|
r |
r |
|
n r |
n |
r |
r |
F1B + F2B + ... + FnB |
= ∑ FkB |
= ∑ Fk |
= F |
|||||
|
|
|
|
k =1 |
k =1 |
|
||
r |
|
r |
r |
|
n |
r |
r |
|
M1B + M 2B + ... + M nB |
= ∑ M kB |
= M B |
||||||
r |
r |
r |
r |
r |
k =1 |
|
|
|
|
|
|
|
|||||
(F1 , F2 ,..., Fn ) ~ |
(F , M B ) |
|
|
|
||||
Главный вектор F |
не зависит от центра приведения, а главный мо- |
|||||||
мент M B |
- зависит. |
|
|
|
|
|
|
|
Таким образом, любая система сил при выборе произвольного центра приведения может быть заменена главным вектором и главным моментом, то есть силой и парой сил. Однако возможно дальнейшее упрощение системы. Можно так выбрать центр приведения, что произвольная система сил, не находящуюся в равновесии, приводится либо к равнодействующей, либо к паре сил, либо к динаме. Динама (динамический винт) – это такая совокупность силы и пары, при которой их вектора параллельны.
3. Теорема Вариньона.
Момент равнодействующей системы сходящихся сил относительно любого центра равен сумме моментов всех сил системы относительно того же центра. Это справедливо для момента сил относительно точки на плоскости, в пространстве и момента сил относительно любой оси.
Условия равновесия произвольной системы сил.
Теорема. Для того чтобы система сил была уравновешенной, необходимо и достаточно, чтобы ее главный вектор и главный момент были равны нулю.
r r |
r |
0 |
F = 0 |
, |
точка В - любая. |
|
(F1 , F2 ,..., Fn ) ~ |
r |
= 0 |
||||
|
|
|
M B |
|
|
|
Условие равновесия сил на плоскости (оси координат Вху).
39
|
n |
|
|
∑ Fkx |
= 0 |
r |
|
|
k =1 |
|
|
F = 0 |
n |
= 0 |
r |
∑ Fky |
|
M B = 0 |
k =1 |
r |
|
n |
|
|
∑ M B |
(Fk )= 0 |
|
|
|
|
k =1 |
|
На плоскости можно решить задачу статики, если число неизвестных не превышает трех. (Задача статически определима.)
Условия равновесия сил в пространстве (оси координат Вхуz).
|
n |
|
|
|
|
|
∑ Fkx |
= 0 |
|||
|
kn=1 |
|
|
= 0 |
|
|
∑ F |
|
|||
|
k =1 |
ky |
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
r |
∑ Fkz |
= 0 |
|||
F = 0 |
|
|
|
|
|
r |
k =1 |
|
|
r |
, точка В - любая в пространстве. |
n |
|
|
|||
M B = 0 |
|
M |
x |
(F )= 0 |
|
|
∑ |
|
k |
|
|
|
k =1 |
|
|
|
|
|
n |
|
|
r |
)= 0 |
|
∑ M y |
(Fk |
|||
|
k =1 |
|
|
|
|
|
n |
|
|
r |
)= 0 |
|
∑ M z |
(Fk |
|||
|
|
|
|
|
|
|
k =1 |
|
|
|
|
В пространстве можно решать задачу статики, если число неизвестных не превышает шести. (Задача статически определима.)
Статически неопределимые задачи, в которых число неизвестных превышает число уравнений, можно решить только с учетом деформации тел. Теоретическая механика не рассматривает деформацию, поэтому решением таких задач занимаются в других областях механики, где учитывается деформация тел.
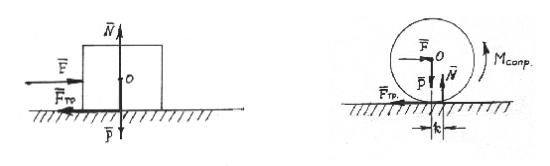
14. Сила трения скольжения.
При попытке перемещать одно тело по поверхности другого возникает сила сопротивления, которая называется силой трения покоя (рис. 1.26).
Fтр ≤ Fпред = fст N
40
N - нормальная реакция, действующая на тело в поверхности кон-
такта.
fст - статический коэффициент трения, который определяется экспериментально.
Он не зависит от площади поверхности контакта тела и определяется свойствами соприкасающихся поверхностей (их материалов, качества обработки, наличия или отсутствия смазки и т.д.).
После того, как начинается скольжение, возникает сила трения скольжения, которая определяется по формуле:
Fтр = fск N
fск - динамический коэффициент трения.
Он находится экспериментально. Выполняется условие fск ≤ fст .
Рис. 1.26 Рис. 1.27
15. Трение качения.
Для того, чтобы катить колесо по негладкой поверхности (рис. 1.27) нужно к его оси приложить силу F , которая должна превысить определенную силу Fпред .
Колесо и поверхность качения в области их контакта деформируются, поэтому равнодействующая N распределенной нормальной реакции будет смещена в сторону качения колеса на расстояние k от вертикали, проходящей через ось колеса и силу тяжести P . Момент пары сил (P; N ) направлен противоположно направлению вращения колеса и называется моментом сопротивления качению. При качении колеса
,
где r - радиус колеса.