

Кафедра систем автоматического управления
Конспект лекций по ТАУ
Оглавление
§1. Основные понятия. 4
Вариант практической цели управления. 5
§2 Статические свойства САУ. (Проблема точности). Основные принципы АУ. Общая структура САУ. 5
Общая структура САУ. 9
§3. Классификация САУ. 9
§4. Дифференциальные уравнения и передаточные функции линейных систем. 11
Дифференциальное уравнение линейной непрерывной системы n-го порядка. 12
§5. Связь между входом и выходом системы во временной области. 13
§6. Передаточные функции типовых соединений звеньев. 14
§7. Частотные характеристики (ЧХ) динамической системы. 16
Математические модели входа и выхода. 17
Физический смысл ЧПФ. 17
§8. Частотные и временные характеристики типовых звеньев САУ. 18
§9. Нетиповые и специальные звенья. 26
Неминимально-фазовые звенья 28
§10. ЛАХ последовательно соединенных звеньев. 28
§11. Определение фазы по ЛАХ минимально-фазовой системы. 30
§12. Детализированные структурные схемы и сигнальные графы. 31
§13. Эквивалентные преобразования структурных схем линейной системы. 31
§14. Теорема Мейсена. 33
§15. Приближенное построение ЛЧХ параллельных соединений звеньев. 34
§16. Математические модели динамических систем в форме переменных состояния. 35
Запись уравнений переменных состояния по ДСС. 37
§17. Линеаризация уравнений динамических систем. 38
Практические способы линеаризации. 41
§18. Передаточная матрица динамической системы. 42
§19. Управляемая каноническая форма. 43
§20. Устойчивость линейных систем. 45
Теоремы первого метода Ляпунова. 49
§21. Суждение об устойчивости линейной системы по коэффициентам характеристического полинома. 49
Критерии устойчивости Гурвица. 50
Критерий Найквиста для АФХ. 51
Критерий Найквиста для ЛЧХ. 57
§23. Качество САУ. 58
Показатели качества переходной характеристики. 59
Частотные оценки качества. 59
Запасы устойчивости. 59
Показатель колебательности. 60
Полоса пропускания 61
Корневые оценки качества. 61
Стандартные полиномы . 63
§24. Точность САУ. 64
Передаточная функция для ошибки. 65
Коэффициент ошибок. 66
Способы нахождения коэффициентов ошибок. 66
Способы определения порядка астатизма. 67
Добротность. 67
§ 25. Синтез САУ. 67
Классический алгоритм синтеза. 67
Методы последовательной коррекции. Типовые последовательные КУ. 68
Параллельная коррекция. 70
§26. Системы подчиненного регулирования (СПР). 71
Стандартная настройка на оптимум по модулю (ОМ). 72
Настройка на симметричный оптимум (СМ). 73
Достоинства СПР (систем подчиненного регулирования). 75
§27. Модальное управление. 75
Методика синтеза модального регулятора. 76
Общая характеристика автоматического управления.
§1. Основные понятия.
Управление – воздействие на некоторый объект (объект управления), влияющее на протекающие в нём процессы и осуществляемое для достижения определенной цели – цели управления.
Пример 1.1. Система автоматического управления скоростью вращения.
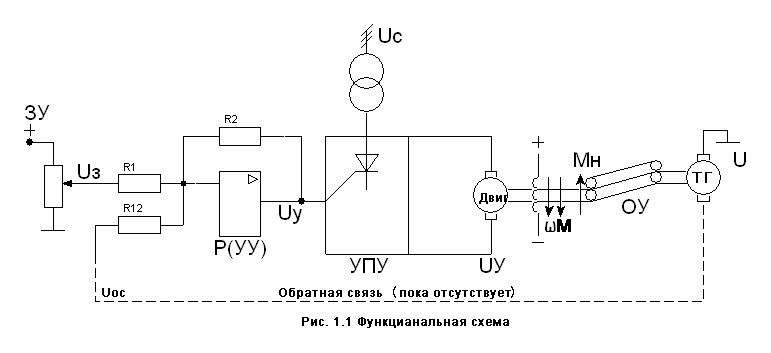 Мн
– Момент нагрузки
Мн
– Момент нагрузки
Uос – Обратная связь
Элементы схемы:
ЗУ – Задающее устройство
Uз – Задающее напряжение
Р(УУ) – Регулятор (управляющее устройство)
Uу – Управляющее напряжение
УПУ – Усилительно-преобразовательное устройство
Иу – Исполнительное устройство
Ис – Напряжение сети
Двиг – Двигатель
ТГ – Тахогенератор
![]() управляемая
(регулируемая) переменная.
управляемая
(регулируемая) переменная.
![]() задающее
воздействие.
задающее
воздействие.
ЦУ – цель управления состоит в том,
чтобы обеспечить с определенной точностью
изменения управляемой переменной
![]() в соответствии с требуемым законом
в соответствии с требуемым законом![]() задаваемым с помощью напряжения
задаваемым с помощью напряжения![]() .
.
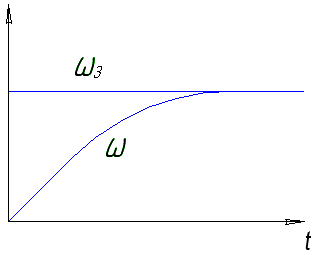
Идеальная ЦУ:
![]() для всех
для всех![]() (1.1)
(1.1)
где
![]()
Однако ЦУ (1.1) недостижима из-за:
Инерционности элементов систем и ограниченности её энергетических ресурсов. Если
 изменилась
скачком, то
изменилась
скачком, то не может измениться (требуется бесконечное
значение).
не может измениться (требуется бесконечное
значение).
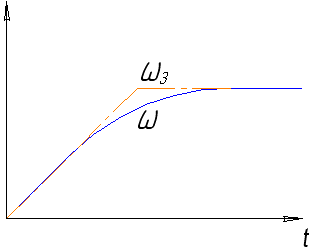
2.
![]() линейно,
то для изменения
линейно,
то для изменения![]() требуется, чтоб момент М изменился
скачком. Следовательно, ток тоже должен
измениться скачком, что невозможно
из-за электромагнитной инерции.
требуется, чтоб момент М изменился
скачком. Следовательно, ток тоже должен
измениться скачком, что невозможно
из-за электромагнитной инерции.
Наличие внешних возмущений (момента нагрузки) и др. факторов, приводящих к тому, что реальный закон изменения
 от заданного
от заданного .
В данной схеме без обратной связи
отсутствие контроля за фактическим
значением
.
В данной схеме без обратной связи
отсутствие контроля за фактическим
значением .
.