

Sb96244
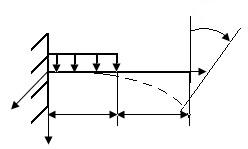
.pdfР.41. Из условия статического равновесия при симметричном
нагружении стержня (рис. 61) |
AV = BV = P⁄2 |
. Уравнение изогнутой линии |
||||||||||||||||||||||||||||||||||||||||||||||
стержня принимает вид: |
|
|
|
|
|
|
|
|
|
|
|
x – |
l |
3 |
. |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Px3 |
|
|
|
|
|
|
|
P |
|
|||||||||||||||||||
uz x |
|
|
|
|
|
|
|
' |
|
|
|
|
|
– |
|
|
|
|
|
|
|
|
|
2 |
|
|
||||||||||||||||||||||
|
= u' z0 + uz0x |
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
12EIy |
|
|
|
|
|
6EIy |
|
||||||||||||||||||||||||||||||||||||||||
Постоянные uz0 и |
|
uz0 |
|
определим |
|
|
из |
граничных условий: при x = 0 |
||||||||||||||||||||||||||||||||||||||||
перемещение uz0 = 0; при x = l также uz0 = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
A |
V |
|
ΘA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ΘB |
B |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|||||||
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
uz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|||||||||
|
|
|
|
|
|
|
|
|
|
l/2 |
|
|
|
|
|
|
l/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 61. Схема стержня, нагруженного сосредоточенной силой |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l 3 |
|
|
|
|
|
|
|
|
|
|||||||||||
Перемещение uz uz0l Pl3 |
12EI y P l |
|
|
|
|
|
|
|
/ 6EI y 0, uz0 Pl2 16 EI y . |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Угол поворота в точке А |
θA= – uz' |
0= – Pl2 |
|
|
16EIy . |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
Уравнение углов поворота принимает вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
Pl2 |
|
|
|
|
|
Px2 |
|
|
|
P x – |
|
l |
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
uz' = |
|
– |
|
+ |
|
2 |
|
. |
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
16EIy |
4EIy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2EIy |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Перемещение в точке С при2 x = l⁄P2 равноl 3 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
uz = |
|
|
Pl |
|
|
|
l |
|
|
– |
|
|
|
|
|
2 |
|
|
|
|
|
|
= |
|
|
|
Pl |
|
|
|
. |
|
|
|
|
|||||||||||||
|
16EIy 2 |
|
|
12EIy |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
48EIy |
|
|
|
|||||||||||||||||||||||||||||||
Величина uz' при x = l равна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
Pl |
2 |
|
|
|
|
Pl |
2 |
|
|
|
|
P |
|
l |
|
|
|
|
|
|
|
Pl |
2 |
|
|
|||||||||||||||||||||
uz' = |
|
|
– |
|
|
|
+ |
|
2 |
|
|
|
|
|
|
= – |
|
|
. |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2EIy |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
16EIy |
|
4EIy |
|
|
|
|
|
|
|
|
|
|
|
|
|
16EIy |
|||||||||||||||||||||||||||||||
Угол поворота поперечной плоскости, проходящей через точку В |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
θB= – uz' |
= |
|
|
Pl2 |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16EIy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
41
|
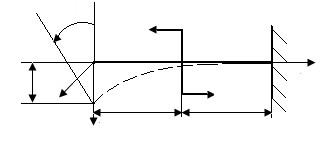
Р.42. Из условий равновесия возникающие в заделке стержня (рис. 62) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
опорная реакция и момент соответственно равны: AV = ql 2 , MA = ql2 |
8 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
В начале отсчета (точка А) в заделке запрещены перемещение и поворот: |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uz0 = 0; uz' 0 = 0. |
|
|
|
|
|
|
|
|
⁄ |
|
|
|
|
|
|
|
⁄ . |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Уравнения упругой линии и углов поворота принимают вид: |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
MA x – 0 |
2 |
|
|
|
AV x |
– 0 |
3 |
|
|
|
q x |
– 0 |
4 |
|
|
|
|
|
q |
|
|
x – |
l |
4 |
|
ql2x2 |
|
|
qlx3 |
|||||||||||||||||||||||
uz |
x = |
|
– |
|
|
|
|
– |
|
|
|
2 |
|
|
|
|
– |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
+ |
||||||||||
|
2EIy |
|
|
|
|
|
|
6EIy |
|
24EIy |
|
|
|
|
|
|
24EIy |
|
|
16EIy |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12EIy |
|||||||||||||||||||||||||
|
|
|
qx4 |
|
|
q |
x – |
|
l 4 |
|
|
ql2x |
|
|
qlx2 |
|
|
|
|
|
|
qx3 |
|
|
|
|
|
q x – |
l |
3 |
|
|
|
|
||||||||||||||||||||
|
|
+ |
– |
|
|
2 |
|
|
|
; uz' = |
– |
|
+ |
|
|
– |
|
2 |
|
. |
|
|
|
|||||||||||||||||||||||||||||||
|
|
24EIy |
|
|
|
24EIy |
|
8EIy |
4EIy |
|
6EIy |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6EIy |
|
|
|
|
|
|||||||||||||||||||||||||
|
Параметр uz' |
при x = l равен |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ql3 |
|
|
|
ql3 |
|
|
|
ql3 |
|
|
|
|
q |
|
|
|
l |
|
|
|
|
|
ql3 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
uz' |
|
x=l |
= |
|
|
– |
+ |
|
– |
|
2 |
|
= |
|
|
|
. |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
4EIy |
6EIy |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
8EIy |
|
|
|
|
|
6EIy |
|
48EIy |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
Угол поворота поперечной плоскости, проходящей через точку В: |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ql3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θB= – uz' = |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
48EIy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ΘB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
l/2 |
|
|
|
l/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
z
Рис. 62. Схема стержня, испытывающего плоскопоперечный изгиб
Р.43. Уравнения упругой линии и углов поворота для стержня, показанного на рис. 63, принимают вид:
|
|
|
M x – |
l |
2 |
|
|
M x – |
|
l |
||||||
uz |
x = uz0 + uz' 0x + |
2 |
|
|
|
; uz' = uz' 0+ |
2 |
|
. |
|||||||
2EIy |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
2EIy |
|
|
|
|
||||
Граничные условия: при x = l в заделке перемещение и угол поворота |
||||||||||||||||
запрещены: |
uz|x=l = 0; uz' |
|
|
|
|
|
|
Ml |
|
Ml |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
x=l= 0; uz' 0+ |
|
|
; uz' 0= – |
|
|
. |
|||||||||
|
|
2EIy |
2EIy |
|||||||||||||
42
|
ΘA |
|
M |
|
|
|
|
||
|
|
A |
B |
|
uz0 |
y |
|
x |
|
l/2 |
l/2 |
|||
|
||||
|
|
|||
|
|
z |
|
|
|
Рис. 63. Схема нагружения стержня |
|||
Таким образом, перемещение и угол поворота в точке А определяются:
|
uz' 0 = |
Ml |
; uz|x=l = uz0 |
|
Ml2 |
|
Ml2 |
3Ml2 |
||
θA = – |
|
– |
|
+ |
|
; uz0 = uzA= – |
|
. |
||
2EIy |
2EIy |
8EIy |
8EIy |
|||||||
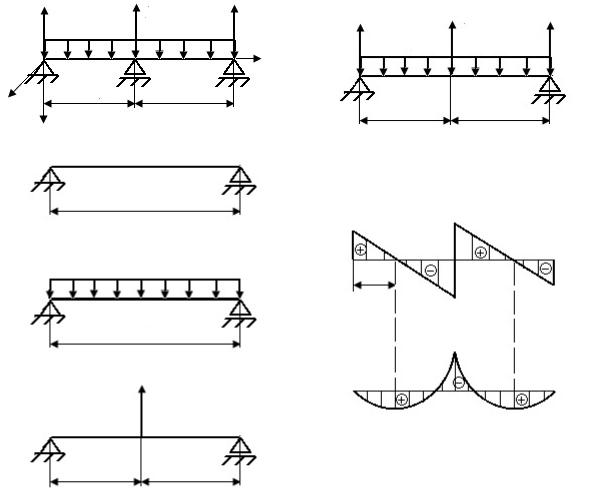
Р.44. На каждый стержень (рис. 33) накладывается по четыре связи, а условий статического равновесия при нагружении стержня в плоскости всего три. Статическую неопределенность можно раскрыть, задав по одному условию, запрещающему перемещение или угол поворота в точке опоры или заделке. Для стержня, показанного на рис. 33, а, перемещения в точке С или точке В, направленные по оси z, равны нулю: uzC = 0 либо uzB = 0. Перемещение по направлению оси z в точке А (рис. 33, б) uzА = 0, либо угол поворота относительно оси y в плоскости, проходящей через точку В, θB = 0.
Р.45. Раскроем статическую неопределенность (рис. 64, а) методом уравнивания перемещений. 1. Выбираем основную систему (рис. 64, б), которую получаем из заданного стержня с нагрузкой путем отбрасывания одной лишней связи (связи в точке В).
2. Нагружаем основную систему заданной нагрузкой (рис. 64, в) и
определяем перемещение в сечении, где была лишняя связь: |
|
|||||||||||||||||||
uzB |
|
|
|
|
5 |
|
|
ql4 |
|
|
|
|||||||||
1= |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
384 EIy |
|
|
|
||||||||||||
3. Загружаем основную систему реакцией лишней связи (рис. 64, г) и |
||||||||||||||||||||
определяем перемещение в том же сечении: |
|
|
|
|
|
|
|
|||||||||||||
uzB |
2 = – |
|
|
1 Bl3 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
48 EIy |
|
|
|
||||||||||
4. Составляем уравнение совместности перемещений: |
|
|
||||||||||||||||||
uzB 1 + uzB 2 = 0, |
|
5 ql4 |
– |
1 Bl3 |
= 0, B = |
5 |
ql. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
384 EIy |
48 EIy |
8 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
43 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
AV |
q |
BV |
CV |
|
B |
CV |
|
|
AV |
q |
|||
|
|
|
|
|||
|
|
|
x |
|
|
|
y |
l/2 |
|
l/2 |
l/2 |
l/2 |
|
z |
|
|
|
|||
|
|
|
|
|||
|
|
а |
|
|
д |
|
|
|
l |
3ql/16 |
5ql/16 |
|
|
|
|
|
|
|
||
|
|
б |
Qz |
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3l/16 |
−5ql/16 |
−3ql/16 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
l |
|
|
ql2/32 |
|
|
|
|
|
|
|
|
|
|
в |
Mу |
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9ql2/512 |
|
|
|
l/2 |
|
l/2 |
|
е |
|
|
|
|
|
|
|
|
г
Рис. 64. Решение статически неопределимой задачи методом уравнивания перемещений
5. Из условий статического равновесия в системе (рис. 64, д) ∑ni=1 Zi = 0,
∑ni=1 Miy, A = 0 определяем опорные реакции AV = CV = 3ql⁄16 и строим эпюры Qz и My (рис. 64, е).
Определение динамических параметров при ударе Р.46. Динамические напряжения σд в элементе конструкции (рис. 35, а)
определяются по формуле σд = kдσст, σст = N⁄F , N = Q, где σст – статическое напряжение; N – нормальная сила; F – площадь поперечного
сечения; Q – сила тяжести груза; kд – коэффициент динамичности. Для анализа используем приближенную формулу коэффициента динамичности
k |
|
= |
|
|
, |
u |
|
= |
Nl |
|
, где u |
|
– статическое перемещение в месте |
д |
2h u |
zст |
zст |
EF |
zст |
||||||||
приложения |
нагрузки; l – |
длина |
элемента конструкции; E – модуль |
||||||||||
|
|
|
⁄ |
|
|
|
|
|
|
|
|
|
|
нормальной упругости материала элемента.
44
Динамические напряжения при растяжении стержня равны
σд= |
N |
|
2hEF |
= |
2hNE |
= |
2hNE |
. |
|
F |
|
Nl |
|
|
|
||||
|
|
|
Fl |
V |
|||||
Уменьшение в 4 раза объема стержня, или площади его поперечного |
|||||||||
сечения, или длины приводит к |
увеличению |
динамического напряжения |
|||||||
в 2 раза, а уменьшение радиуса поперечного сечения в 4 раза приводит к увеличению напряжения в 4 раза. Уменьшение в 4 раза высоты падения груза h, или веса падающего груза Q, или модуля нормальной упругости материала стержня приводит к уменьшению динамического напряжения в 2 раза.
Динамические напряжения σд в стержне, показанном на рис. 35, б,
определяются по |
формуле σ = k σст, kд = |
2h |
uzст |
, где h – высота |
||||
падения груза; uzст – статическоед |
перемещениед |
в |
⁄месте падения груза под |
|||||
действием силы Q. Статическое перемещение в стержне под действием силы |
||||||||
Q (рис. 35, б) |
|
|
|
|
|
|
|
|
|
|
Ql3 |
πr4 |
|
|
|
||
|
uzст = |
|
, Iy= |
|
, |
|
|
|
|
EIy |
4 |
|
|
|
|||
где E – модуль |
нормальной упругости |
материала элемента; l – длина |
||||||
стержня; Iy – осевой момент инерции; r – радиус круглого поперечного сечения. Коэффициент динамичности равен kд 24hE r4 Ql3 . При
Ql3 . При
увеличении параметров E и r в 4 раза динамические напряжения возрастают соответственно в 2 раза и в 16 раз.
Максимальные касательные динамические напряжения на боковой поверхности вала (рис. 35, в) при резкой остановке определяются по формуле
τ = 2 |
|
TG V |
, где T |
– кинетическая энергия; G – модуль упругости |
при |
сдвигед |
; V⁄– объем |
вала. При увеличении в 4 раза длины стержня, |
или |
||
площади поперечного сечения, или объема вала касательные динамические напряжения τд уменьшатся в 2 раза. При увеличении в 4 раза модуля упругости при сдвиге G напряжение τд увеличивается в 2 раза.
Р.47. Динамические напряжения в стержне определяются формулой σд = 2hNE⁄V. При увеличении высоты падения груза в 9 раз динамические напряжения вырастают в 3 раза.
45
СОДЕРЖАНИЕ |
|
ЗАДАЧИ……………………………………………………………………….. |
3 |
Основные понятия прикладной механики………………………………. |
3 |
Закрепление стержней. Опорные реакции………………………………. |
5 |
Определение внутренних усилий в стержнях…………………………… |
5 |
Основные уравнения механики твердого деформированного тела……. |
6 |
Расчет напряжений и анализ прочности стержней……………………... |
10 |
Расчет перемещений………………………………………………………. 12
Определение динамических параметров при ударе…………………….. 15
РЕШЕНИЕ ЗАДАЧ………………………………………………………….... 17
Основные понятия прикладной механики………………………………. 17 Закрепление стержней. Опорные реакции………………………………. 19 Определение внутренних усилий в стержнях…………………………… 22 Основные уравнения механики твердого деформированного тела……. 25 Расчет напряжений и анализ прочности стержней……………………... 30
Расчет перемещений………………………………………………………. 39
Определение динамических параметров при ударе…………………….. 44
46

Бегун Петр Иосифович, Лебедева Елена Александровна, Лобачева Дарья Александровна
Сборник задач по прикладной механике
Учебно-методическое пособие
Редактор Н. В. Кузнецова
Подписано в печать 16.03.18. Формат 60×84 1/16. Бумага офсетная. Печать цифровая. Печ. л. 3,0.
Гарнитура «Times New Roman». Тираж 121 экз. Заказ 23.
Издательство СПбГЭТУ «ЛЭТИ» 197376, С.-Петербург, ул. Проф. Попова, 5
47