

Sb95734
.pdfМИНОБРНАУКИ РОССИИ
––––––––––––––––––––––––––––––––––––––––––––––––––––
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В. И. Ульянова (Ленина)
––––––––––––––––––––––––––––––––––––––––––––
Е. Б. СОЛОВЬЕВА
МЕТОДЫ СИНТЕЗА НЕЛИНЕЙНЫХ ПРЕОБРАЗОВАТЕЛЕЙ СИГНАЛОВ
Электронное учебное пособие
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2017
1
УДК 621.3.011.74 (07) ББК З 811.72я7
С60
Соловьева Е. Б.
С60 Методы синтеза нелинейных преобразователей сигналов: электрон. учеб. пособие. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2017. 48 c.
ISBN 978-5-7629-2115-2
Содержит основные сведения об операторном подходе к моделированию и синтезу нелинейных дискретных цепей, а также материал, посвященный использованию системы MATLAB для анализа линейных электрических цепей.
Предназначено для студентов всех специальностей и направлений ФКТИ, может быть полезно магистрам, аспирантам, преподавателям и научнотехническим работникам университета.
УДК 621.3.011.74 (07) ББК З 811.72я7
Рецензенты: кафедра «Электроснабжение» Ульяновского государственного технического университета; д-р техн. наук А. А. Ланнэ (СПбГУТ).
Утверждено редакционно-издательским советом университета
в качестве электронного учебного пособия
ISBN 978-5-7629-2115-2 |
СПбГЭТУ «ЛЭТИ», 2017 |
2
Моделирование и синтез преобразователей сигналов, реализуемых на базе аналоговых и дискретных цепей, существенно усложняется в условиях роста интеграции и повышения требований к качеству обработки сигналов систем различного назначения (электротехнических, радиоэлектронных, телекоммуникационных, электроакустических и т. д.) В этой связи операторный подход, когда устройство представляется в виде «черного ящика», а информация о нем содержится в операторном уравнении, описывающем однозначное соответствие между множествами входных и выходных сигналов, является безусловно перспективным, а иногда единственно возможным способом исследования нелинейных процессов в сложных аналоговых и дискретных цепях [1]–[5].
Цель учебного пособия – познакомить читателя с известными математическими формами операторных моделей нелинейных дискретных цепей (НДЦ), методами идентификации полиномиальных моделей Вольтерры во временной и частотной областях, а также методами синтеза операторов НДЦ на примерах построения демодулятора, фильтра импульсных помех, компенсатора нелинейных искажений сигналов в каналах связи (КС); помочь в выполнении курсового расчета по теории электрических цепей с использованием пакета MATLAB.
1. ОПЕРАТОРНЫЕ УРАВНЕНИЯ И ФОРМЫ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ НЕЛИНЕЙНЫХ ДИСКРЕТНЫХ ЦЕПЕЙ
Операторное уравнение, описывающее однозначное соответствие между множествами входных и выходных сигналов НДЦ, имеет вид
Y o F X , |
(1.1) |
s |
|
где X , Y o – множества входных и выходных сигналов цепи соответственно; Fs – нелинейный оператор цепи, определяющий нелинейное математическое
преобразование.
Однозначность отображения множеств исключает ситуацию, когда одному входному сигналу соответствуют разные выходные сигналы цепи [1] – [5].
Уравнение (1.1) можно записать в форме следующего равенства:
yo (n) F x(n) |
(1.2) |
s |
|
3
для всех сигналов x(n) X |
и yo (n) Y o , где |
n 0,G |
n |
|
– нормированное |
|
|
|
|
|
дискретное время, Gn – длительность финитных или период периодических сигналов.
Нелинейность оператора Fs обусловлена следующими свойствами опе-
раторного уравнения (1.2) НДЦ:
– неоднородностью
Fs x(n) Fs x(n) ,
где – постоянная;
– неаддитивностью
Fs x1(n) x2(n) ... xm (n) Fs x1(n) Fs x2(n) ... Fs xm (n) ,
где x1(n) X , x2 (n) X , ..., xm (n) X .
Построение нелинейного оператора Fs по однозначному соответствию вход-выход (на основе множеств входных и выходных сигналов НДЦ) воз-
можно при условиях: |
|
|
|
|||||||||
|
|
|
из множества воздействий |
X сформировано подмножество испыта- |
||||||||
тельных сигналов |
|
|
|
X xq (n) Q |
, X X , а из множества реакций Y o |
|||||||
|
|
|
|
|
|
|
|
|
q 1 |
|
|
|
соответствующее подмножество Y o yqo (n) Q |
, |
Y o Y o измеренных или |
||||||||||
|
|
|
|
|
|
|
|
|
|
q 1 |
|
|
вычисленных выходных сигналов цепи. |
|
|
||||||||||
|
|
Нелинейный оператор F с погрешностью |
|
однозначно отображает |
||||||||
подмножество X |
|
в подмножество Y o , т. е. справедливо равенство |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yq (n) F xq (n) |
|
(1.3) |
|
при |
|
|
|
yqo (n) yq (n) |
|
|
|
для всех xq (n) X , yqo (n) Y o ; |
||||
|
|
|
|
|||||||||
НДЦ обладает свойством непрерывности, т. е. реакции цепи на сигналы, отличные от испытательных, но принадлежащие заданному классу воздействий ( x(n) X , x(n) X ), мало отличаются от реакций на соответству-
ющие испытательные сигналы.
В результате с учетом равенства (1.3) можно утверждать, что нелинейный оператор F с погрешностью однозначно отображает множество X во
множество Y o , т. е.
|
|
|
|
|
|
|
|
y(n) F x(n) |
(1.4) |
при |
|
|
|
yo (n) y(n) |
|
|
|
для всех x(n) X , yo (n) Y o . |
|
|
|
|
|
|
4
Уравнение (1.4) означает, что оператор F аппроксимирует оператор Fs
НДЦ на множествах X и Y o с погрешностью . |
|
||||||||
Параметры нелинейного оператора F |
находятся в результате решения |
||||||||
задачи аппроксимации |
|
|
|
|
|
|
|
|
|
|
yo (n) F x |
q |
(n) |
|
|
|
min , |
(1.5) |
|
|
|
|
|||||||
|
q |
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
где c вектор параметров оператора F . Согласно свойству непрерывности
НДЦ полученное решение (вектор c ) задачи (1.5) является решением более общей задачи аппроксимации
yo (n) F x(n) |
|
|
|
min . |
|
|
|||
|
|
|
|
c |
|
|
|
|
На практике норма погрешности аппроксимации оператора Fs оператором F рассматривается в равномерной метрике (C )
yo (n) F x(n) |
|
|
|
max |
|
yo (n) F x(n) |
|
|
|
||||
|
|
|
|
x n X |
|
|
|
|
|
|
|
|
и в среднеквадратичной метрике ( L2 )
|
|
1 |
G |
|
|
|
|||
yo (n) F x(n) |
|
ygo (n) F xg (n) 2 . |
||
G |
||||
|
|
g 1 |
||
|
|
Математическое представление нелинейного оператора F называется математической моделью НДЦ. Существует несколько универсальных форм представления оператора F . К ним относятся:
–функциональный ряд Вольтерры [1] – [5];
–функциональный полином Вольтерры [1] – [5];
–полином расщепленных сигналов [1], [5];
–нелинейная авторегрессионная модель [6];
–нейронная цепь [1] – [3], [5], [7], [8].
На основе математического описания цепи в виде операторного уравнения (1.4) можно характеризовать процессы идентификации, моделирования и синтеза НДЦ следующим образом.
Идентификация цепи это процесс построения нелинейного оператора F (определение параметров математической модели цепи в результате решения задачи (1.5)) по известным множествам входных и выходных сигна-
5
лов. В качестве испытательных входных сигналов НДЦ могут быть использованы как детерминированные, так и случайные сигналы.
Математическое моделирование цепи это использование полученной в процессе идентификации НДЦ математической модели для расчета выходных сигналов цепи.
Синтез цепи это создание физически или программно-реализуемого объекта, выполняющего заданное функциональное назначение, например фильтрацию, детектирование, компенсацию и т. д.
Рассмотрим указанные универсальные формы моделей НДЦ, обладающих свойством стационарности. НДЦ стационарна, если ее реакция инвариантна по отношению к моменту появления входного сигнала; параметры стационарной НДЦ постоянны во времени.
1.1. Функциональный ряд и полином Вольтерры
Дискретная форма ряда Вольтерры [1] – [5] имеет вид
|
|
|
|
|
k |
|
|
y(n) Hk x(n) |
... |
hk m1, m2 ,..., mk x n mr , (1.6) |
|||||
k 0 |
k 0 m1 0 m2 0 mk 0 |
r 1 |
|
||||
где |
|
|
|
|
|
|
|
Hk x(n) |
|
|
|
|
k |
mr |
|
|
... |
hk m1, m2 |
,..., mk x n |
(1.7) |
|||
|
m1 0m2 0 |
mk 0 |
|
r 1 |
|
|
|
– функционал Вольтерры степени k . Функционал Вольтерры обладает свойством однородности
Hk x(n) |
|
|
|
|
|
|
|
k |
|
|
|
|
|
||
|
... hk m1, m2 ,..., mk x n mr |
|
|||||||||||||
|
|
|
m1 0 m2 0 |
mk 0 |
|
|
|
|
r 1 |
|
|
|
|
||
k H |
k |
x(n) |
k |
|
... |
|
h |
m , m |
2 |
,..., m |
k |
k |
x n m |
r |
. |
|
|
|
|
|
|
k |
1 |
|
|
|
|
||||
|
|
|
|
m1 0 m2 0 mk 0 |
|
|
|
|
|
r 1 |
|
|
|
||
Многомерная функция hk m1,m2 ,..., mk называется ядром Вольтерры порядка k .
При k 0 функционал нулевой степени является константой h0 , опи-
сывающей ненулевые начальные условия в цепи.
При k 1 выражение (1.7) представляет собой линейную свертку, описывающую линейную подсистему с импульсной характеристикой h(n) .
6
При k 1 многомерная сумма (1.7) нелинейна относительно входного сигнала, поэтому ее называют нелинейной сверткой порядка k . Такая свертка формирует выходной сигнал нелинейной подсистемы порядка k с ядром hk m1,m2 ,..., mk , называемым многомерной импульсной характеристикой
порядка k .
Ядра Вольтерры симметризуются, т. е. полагаются равными
|
|
1 |
|
~ |
|
|
|
hk m1, m2 |
,..., mk |
|
|
hk m1 |
, m2 |
,..., mk , |
|
k! |
|||||||
|
|
|
|
|
|||
где сумма вычисляется по всем перестановкам аргументов m1,m2 ,...,mk .
Введение симметризации устраняет неоднозначность в определении ядер (симметризованные ядра не меняют своего значения при перестановках переменных m1, m2 ,...,mk ).
Однородные функционалы с симметризованными ядрами называются
регулярными.
Отрезок функционального ряда Вольтерры дает приближенное аналитическое представление реакции цепи через ее параметры и воздействие. Установленная зависимость универсальна в том смысле, что справедлива при любых воздействиях, лишь бы их амплитуды обеспечивали сходимость ряда Вольтерры. Условие сходимости ряда Вольтерры выполняется при малых амплитудах воздействия, когда режим работы НДЦ слабонелинейный.
В режиме существенной нелинейности, когда функциональный ряд Вольтерры расходится, соотношение вход-выход НДЦ можно описать функциональнымполиномомВольтеррыстепени L [1] – [5]
L |
L |
|
|
|
k |
y(n) Hk x(n) |
... |
hk m1, m2 |
,..., mk x n mr . (1.8) |
||
k 0 |
k 0 m1 0 m2 0 mk 0 |
r 1 |
|||
Принципиально такая возможность следует из теоремы М. Фреше [1] – [5]. Теоретический результат формулируется следующим образом: если зависимость реакции цепи от воздействия описывается непрерывным оператором, то при любом множестве воздействий, равномерно ограниченных по норме, можно найти функциональный полином Вольтерры, аппроксимирующий с заданной точностью в метрике L2 нелинейный оператор цепи на ко-
нечном интервале времени.
Отметим, что полином (1.8) и отрезок ряда Вольтерры (1.6) имеют одинаковую математическую форму записи, однако их параметры – ядра Вольтерры – различны [1] – [5].
7

1.2. Многочлен расщепленных сигналов
Согласно теории расщепления сигналов [1], [5] оператор F НДЦ представляется композицией двух операторов: оператора Fp расщепителя и опе-
ратора PL нелинейного безынерционного преобразователя (НБП). Оператор-расщепитель Fp преобразует скалярные входные сигналы
x(a,n) X НДЦ, где a Ga – вектор из множества Ga параметров воздействия, в соответствующие векторные сигналы
x p a, n Fp x a, n x p1 a, n , x p2 a, n , ..., x pm a, n t
(t – знак транспонирования) таким образом, чтобы выполнялись условия:
– векторные сигналы не исчезали, т. е. x p a,n 0 при всех x a,n X ;
– векторные сигналы в каждый момент времени разные, т. е. при любых a1 a2 , a1 Ga , a2 Ga , n1 n2 , n1 0,Gn , n2 0,Gn справедливо нера-
венство xp a1, n1 xp a2, n2 .
Пример 1.1. |
Выполним |
|
расщепление |
сигнала x nT cos nT при |
||||||
n 0, 1, 2, 3 |
и периоде дискретизации T / 2 . |
|||||||||
|
|
n |
|
nT |
|
x nT cos nT |
|
x p nT |
|
|
|
|
|
|
|
|
|||||
|
|
0 |
|
0 |
|
1 |
|
[1, 0] t |
|
|
|
|
1 |
|
π/2 |
|
0 |
|
[0, 1] t |
|
|
|
|
2 |
|
π |
|
–1 |
|
[–1, 0] t |
|
|
|
|
3 |
|
3π/2 |
|
0 |
|
[0, –1] t |
|
|
Из таблицы видно, что рассматриваемый сигнал в разные моменты времени ( nT / 2 и 3 / 2 ) принимает одинаковые значения (равен нулю). Следовательно, сигнал x nT не расщеплен по переменной времени n .
Расщепленным сигналом является векторный сигнал x p nT cos nT , sin nT t ,
поскольку значения сигнала x p nT , указанные в таблице, различны при раз-
ных n .
Расщепление сигналов реализуется различными (линейными, нелинейными, стационарными, нестационарными) математическими преобразовани-
8
ями [1], [5]. Способы расщепления зависят от класса расщепляемого сигнала. Важным критерием выбора способа расщепления является минимальность числа каналов расщепителя (минимальность длины вектора расщепленных сигналов).
Оператор НБП отображает векторные сигналы x p a, n в скалярные выходные сигналы y n Y цепи. Обычно такой оператор описывается много-
мерным многочленом степени L |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
y n PL x p a,n |
|
|
|
|||
|
I1 |
|
I2 |
Im |
|
|
x p1 a, n i1 |
xp2 a, n i2 |
... x pm a, n im , |
|
|||
|
|
i |
... |
Ci i |
...i |
m |
(1.9) |
||||||
|
i 0 |
2 |
0 i |
m |
0 1 2 |
|
|
|
|
|
|
||
|
1 |
|
|
|
|
|
|
|
|
|
|
||
где L I1 I2 ... Im .
Возможны и другие формы представления оператора PL , например в виде дробно-рациональной функции, экспоненциального многочлена и др. [1], [5].
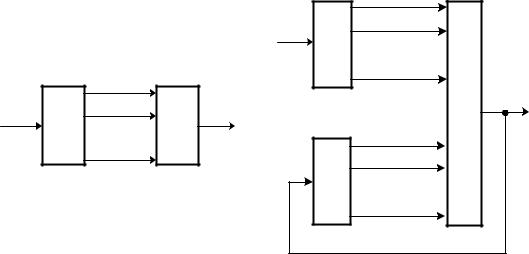
Операторному уравнению (1.9) соответствует нерекурсивная функциональная схема модели НДЦ, изображенная на рис. 1.1, а.
Наряду с нерекурсивной моделью (1.9) НДЦ возможно конструирование рекурсивной модели, описываемой уравнением
y(n) PL x p a, n
I1 |
|
I2 |
Im |
Im 1 |
|
Im 2 |
I |
|
|
|
|
|
,..., i |
|||
|
i |
... |
|
|
|
|
... Ci ,i |
, ...,i |
|
,i |
,i |
|||||
i 0 |
0 |
i |
0 i |
|
0 i |
|
0 |
i 0 |
1 2 |
|
m |
m 1 |
m 2 |
|
||
1 |
2 |
m |
m 1 |
|
m 2 |
|
|
|
|
|
|
|
|
|||
x p1 a,n i1 x p2 a,n i2 ... x pm a,n im
y p(m 1) a,n im 1 y p(m 2) a,n im 2 ... y p a,n i ,
где x p1 a, n , x p2 a, n , ..., x pm a, n , y p(m 1) a, n , y p(m 2) a, n , ...,
y |
p |
a, n – расщепленные сигналы, степень |
L I |
I |
2 |
... I |
m |
I |
m 1 |
|
|
|
1 |
|
|
|
|
Im 2 ... I .
9
|
|
|
|
|
|
x p1 a,n |
|
|
|
|
|
|
|
x a,n |
xp2 .a,n |
|
|
|
|
|
|
|
Fp |
. |
|
|
|
|
|
|
|
. |
|
|
|
|
|
x p1 |
|
|
|
xpm a,n |
|
|
|
|
a,n |
|
|
|
|
PL y n |
|
x a,n |
F |
xp2 |
.a,n |
P |
L y n |
|
|
|
|
p |
. |
|
y p(m 1) a,n |
|
|||
|
|
. |
|
|
|
|||
|
|
xpm a,n |
|
|
y p(m 2) a,n |
|
||
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
Fp |
. |
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
y p a,n |
|
|
|
|
а |
|
|
б |
|
|
|
|
|
|
|
|
Рис. 1.1 |
|
|
|
Функциональная схема рекурсивной модели НДЦ представлена на рис. 1.1, б. Особенность рекурсивной модели состоит в необходимости учета условий устойчивости при ее построении, что весьма сложно в случае моделирования нелинейных дискретных цепей.
1.3. NARMAX-модель
НДЦ можно описать с помощью NARMAX-модели [6] (Non-linear AutoRegressive Moving Average model with eXogenous inputs – нелинейная авто-
регрессионная модель со скользящим средним при внешних воздействиях), имеющей вид
y n F x n , x n 1 , ..., x n Nx , y n 1 , ..., y n N y ,
|
e n 1 , ..., e n Ne e n , |
(1.10) |
где F |
– нелинейный оператор; x n – воздействие НДЦ; |
e n – независимая |
от входного сигнала помеха, действующая на цепь.
Значение max N x , N y , Ne определяет порядок модели (1.10).
NARMAX-модель получила свое название в силу возможности формирования на ее основе скользящего среднего и авторегрессионного процессов.
Скользящим средним называется процесс на выходе линейной нерекурсивной подсистемы порядка Nx , описываемой разностным уравнением
y n b0x n b1x n 1 ... bN x x n Nx .
10