

4406
.pdf31
ся на точностных и качественных показателях обработки и интенсифицирует износ основных элементов станков.
При проведении всех лабораторных работ используется единый комплекс.измерительной и регистрирующей аппаратуры, блок-схема которого дана на рис. 3.4, включающей индуктивные датчики ДДИ-20 в комплекте с вторичным преобразователем ИД-2 и для измерения относительных виброперемещений, датчик оборотов ДОФ в комплекте, с электронным цифровым частотомером ЧЗ-З2.
ЭО
С1-19
БП
ДДИ-20
|
|
|
ИД-2 |
|
коммутацион- |
|
ШО |
|
|
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
ный щит кщ |
|
Н-700 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДОф
|
|
|
ЧЗ-32 |
|
П-001 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 3.4 – Блок схема измерительной части
32
ЛАБОРАТОРНАЯ РАБОТА №4.
МОДЕЛИРОВАНИЕ РАБОЧЕГО ПРОЦЕССА МЕХАНИЗМА ПОДАЧИ И РЕЗАНИЯ ДЕРЕВООБРАБАТЫВАЮЩЕГО СТАНКА С ПРИМЕНЕНИЕМ ЭВМ
Цель работы: Получить практические навыки моделирование рабочего процесса механизма подачи и резания деревообрабатывающего станка с применением ЭВМ
Математическая модель процесса обработки
Математическая модель процесса обработки включает в себя алгоритм поиска состояний рабочих органов и расчет параметров резания в некоторые дискретные моменты времени обработки партии деталей.
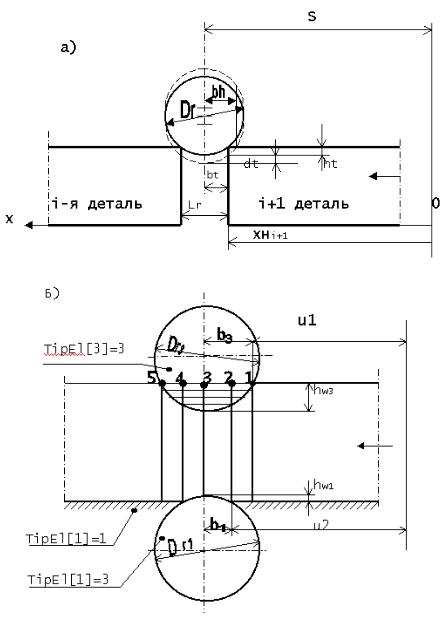
Введем следующие обозначения (рис.1).
3 |
S
bh |
u1 |
3 |
4 |
2 |
1 |
|
D |
|
|
|
|
|
|
|
dt |
tsl |
|
|
|
|
|
|
|
|
0 |
|
bw Ld |
ht |
|
|
|
hw |
|||
|
|
|
XK |
|
Lr |
|
XH |
||
Рисунок 4.1 – Схема взаимодействия рабочего органа с деталью
Ld,Lrразмер (длина или ширина) детали и промежуток между деталями в направлении подачи;
XH,XKкоордината переднего и заднего конца детали относительно системы координат станка, XK=XH-Ld;
S- координата рабочего органа;
tslтолщина обработки (снимаемого слоя);
33
D- диаметр резания;
bwрасстояние по горизонтали от оси рабочего органа до точки контакта зуба с нижней поверхностью детали;
bhтоже с верхней поверхностью детали;
hwвыступ зубьев рабочего органа над поверхностью детали;
Расчетными параметрами являются:
isсостояние рабочего органа, определяемое координатой передней и задней кромки детали;
u1,u2,u3,u4координаты характерных точек контакта резцов с деталью;
htтекущее значение выступа рабочего органа при срезе неполномерных стружек;
dtфактическая текущая толщина обработки (снимаемого слоя).
Введите по заданию преподавателя в качестве исходных данных следую-
щие параметры: |
|
|
d,tls,hw,S? |
400,50,10,500 |
|
Введите XH,XK? |
475,175 |
|
Результат расчёта: |
|
|
Код состояния |
___________ |
|
ht |
___________ |
|
dt |
___________ |
|
Повторить ? Y/N? |
N |
|
Введите ширину пропила (ширину В пилы),mm? |
2.8 |
|
Введите скорость подачи u,м/мин? |
|
12 |
Введите скорость резания v,м/с? |
|
60 |
Введите удельную работу резания К,Н/м2? |
|
30000000 |
Введите КПД механизма резания nu,%? |
|
92 |
Введите коэффициент запаса K? |
|
3 |
Введите частоту вращения n,мин-1? |
|
3000 |
Результат расчёта: |
|
|
Мощность механизма резания ,кВт N |
|
_________ |
Продолжить Y/N ? |
|
N |
34
Математическая модель процесса подачи на ЭВМ.
Математическая модель процесса подачи включает в себя алгоритм поиска состояний опорных и прижимных элементов и расчет режимов их нагружения в некоторые дискретные моменты времени.
Различают следующие типы ( TipEl ) опорных и прижимных элементов и
условия их применения: |
|
|
1) |
стол, направляющая, прижим скольжения; |
(TipEl=1); |
2) |
конвейер ( цепь, лента, ремень ); |
(TipEl=2); |
3) |
ролик гладкий или с прямыми рифлями; |
(TipEl=3); |
4) |
ролик с винтовыми рифлями; |
(TipEl=4); |
5) ролик с наклоном его оси вращения к направлению подачи.
Для составления математической модели используют понятие участок. Элементарным участком станка называют часть общей длины станка между двумя соседними элементами (ведущий ролик, прижим скольжения или режущий орган), расположенными в одной или разных координатных плоскостях. Если в зоне участка находится обрабатываемая деталь, то такой участок и принадлежащие ему опорные и прижимные элементы станка считаются активными.
На неактивных элементах и участках полезная нагрузка отсутствует. Схема взаимодействия прижимного элемента типа ролик с деталью
показана на рис. 4.2. Введем обозначения:
Detalномер готовой детали, вышедшей из станка; Zagotномер заготовки, находящейся в станке;
Ld,Lrразмер (длина, ширина) детали и промежуток между деталями в направлении подачи;
XH,XKкоордината переднего и заднего конца детали; S- координата рабочего органа;
XH,XKкоордината переднего и заднего конца детали; S- координата рабочего органа;
hwначальный уровень настройки образующей прижимного элемента относительно поверхности детали (выступ ролика); Drдиаметр опорного и прижимного ролика.
hwначальный уровень настройки образующей прижимного элемента относительно поверхности детали (выступ ролика);
35
Drдиаметр опорного и прижимного ролика.
Рисунок 4.2 – Схема взаимодействия прижимного элемента с деталью при базировании: а) на опорном столе; б) на опорном ролике.
Расчетными параметрами являются:
is-состояние опорного и прижимного элемента, определяется положением передней и задней кромки детали; u1,u2,u3,u4,u5координаты характерных точек контакта элемента с деталью;
htтекущий уровень настройки образующей прижимного элемента относительно поверхности детали (выступ ролика);
36
dtтекущее значение выступа (подъема) прижимного органа.
Если в станок подается первая заготовка (Zagot=1) или последняя (Zagot=end), или половина промежутка между заготовками больше начальной длины захода (схода) ролика, то текущая длина захода (схода) bt равна начальному значению, в противном случае – половине промежутка между деталями.
Введите по заданию преподавателя в качестве исходных данных следую-
щие параметры: |
|
Введите d1,d3,hw1,hw3? |
120,150,3,5 |
Результат расчёта: |
|
b1 |
___________ |
b3 |
___________ |
Введите S,XH,XK? |
500,480,180 |
Результат расчёта: |
|
TipEl[1] |
__________ |
TipEl[3] |
__________ |
tgf[1] |
__________ |
tgf[3] |
__________ |
Код состояния |
__________ |
Введите коэффициенты сцепления роликов с |
|
заготовкой c1,c2? |
0.95,0.7 |
Введите коэффициенты трения роликов и стола с |
|
заготовкой f1,f2? |
0.35,0.07 |
Введите силу сопротивления подаче при обработке F,H? 500 |
|
Введите силу прижима Q,H? |
160 |
Введите вес заготовки G,H? |
50 |
Введите КПД механизма подачи, nu? |
0.72 |
Введите скорость подачи u,м/мин? |
12 |
Результат расчёта: |
|
Мощность механизма подачи ,кВт N |
_________ |
37
ЛАБОРАТОРНАЯ РАБОТА №5. СОСТАВЛЕНИЕ КИНЕМАТИЧЕСКОЙ И РАСЧЕТНОЙ
СХЕМЫ ЗАХВАТА.
Цель работы: Получить практические навыки составления кинематических схем захватных устройств по моделям. Спроектировать захватное устройство по исходным данным
Приборы и оборудование: Опытный образец захватного устройства УБТ- 0,8, установленный на действующий лабораторный стенд. Измерительные инструменты: слесарная линейка, штангенциркуль. Чертѐжные инструменты.
Исходные данные: Параметры захвата-модели. 1. Порядок выполнения работы.
Изучить конструкцию действующего стенда захвата-модели и инструкцию по технике безопасности.
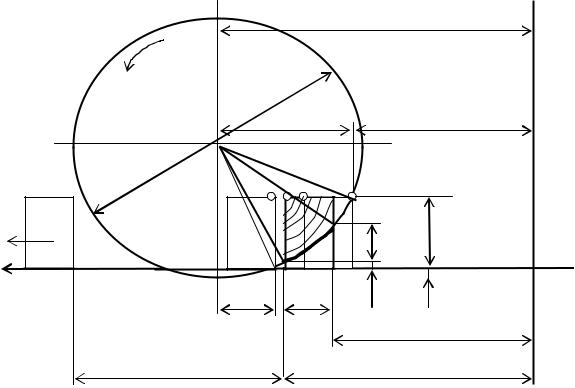
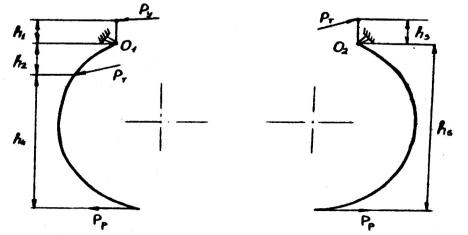
Измерить основные геометрические размеры захвата-модели согласно обозначениям на рис. 5.1.
Рисунок 5.1 – Расчетная схема захвата.
ВЫЧЕРТИТЬ В МАСШТАБЕ КИНЕМАТИЧЕСКУЮ СХЕМУ ЗАХВАТА С НАНЕСЕНИЕМ ВСЕХ РАЗМЕРОВ.
Определить следующие силы: Усилие в гидроцилиндре:
|
Д |
2 |
|
Pц Pmax |
|
ц |
(5.1) |
4 |
|
||
|
|
|

|
|
|
|
|
38 |
|
|
||
где |
Pmax |
– максимальное давление рабочей жидкости при срабатыва- |
|||||||
|
нии предохранительного клапана в гидросистеме; |
|
|||||||
Pmax |
= 13,5 МПа; |
|
|
|
|
|
|
||
|
M 01 Pц h1 Pт h2 Pр h4 |
0; |
(5.2) |
||||||
|
M 02 Pт h3 Pр h5 0. |
|
|
||||||
|
|
|
|
||||||
Реактивные силы: |
|
|
|
|
|
|
|||
|
|
Pp |
|
|
Pц h1 |
|
, |
(5.3) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
|
(h4 h5 h2 ) / h3 |
|
|||||
Усилие в тяге согласования: |
|
|
|
||||||
|
|
Pт |
|
Pp h5 |
|
|
|
(5.4) |
|
|
|
h3 |
|
|
|||||
|
|
|
|
|
|
|
|
||
Определить изгибающие моменты в опасных сечениях челюстей, и по максимальному определить расчетный момент сопротивления Wp и сравнить его с фактическим Wф:
W p |
M из (max) |
|
(5.5) |
|
[G]из |
||||
|
|
|||
где [G]из – допустимое направление изгиба |
|
|||
[G]из = 80-120мПа; Mиз(max) = Pph5 |
(5.6) |
|||
W |
BH 3 |
bh3 |
|
|
(5.7) |
|||||||
|
|
|
|
|
|
|
|
|
|
|||
ф |
6H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
запас прочности |
K p |
|
Wф |
|
|
(5.8) |
||||||
W р |
|
|
||||||||||
|
|
|
|
|
|
|
||||||
Определить поперечные сечения тяги согласования и пальцев шарнирных |
||||||||||||
соединений и сравнить их с фактическими: |
|
|
||||||||||
|
|
Pт |
|
|
|
Pт |
(5.9) |
|||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
[G] р |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d n |
|
|
|
|
|
4Pт |
(5.10) |
||||
|
|
[ ]ср |
||||||||||
|
|
|
|
|
|
|
||||||
Допускаемые напряжения на разрыв и срез принять в пределах:
[ ]p 200 250мПа, |
[ ]ср 80 120мПа. |

39
По исходным данным (по заданию преподавателя) выбираем по варианту для бригады заданную массу пакета Mg, технологические силы T и N, длину бревен Lg, и определяем основные геометрические параметры проектируемого захвата и строим кинематическую схему:
Радиус кривизны рабочей поверхности челюсти:
R |
Mg n |
(5.11) |
|
Lg Kз
где – плотность древесины 600-800кг/м3; Кз – коэффициент заполнения 0,7-0,75.
Остальные геометрические параметры захвата определяем методом геометрического подобия по захвату-модели, например:
Величина раскрытия челюстей
L = Lm (5.12)
– масштаб геометрического подобия определяем по соотношению известных величин радиусов кривизны:
|
|
|
|
Rm |
|
|
|
|
(5.13) |
|
|
|
|
R |
|
|
|
||||
Определяем усилия обжатия, действующие на челюсти, из условия на- |
||||||||||
дежного удержания стволов в захвате: |
|
|
|
|||||||
P |
|
|
(Т Fg)R |
|
(5.14) |
|||||
|
|
|||||||||
об |
|
|
|
2 0,8 f I |
|
|||||
|
|
|
|
|
|
|||||
где Fg – сила трения между стволами от силы тяжести деревьев: |
|
|||||||||
Fg |
Nf I |
(R d |
бр |
)2 |
|
(5.15) |
||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|||||
|
|
dбр |
|
|
||||||
|
|
|
|
|
|
|
|
|
||
где f I – коэффициент трения древесины f I =0,8; dбр – средний диаметр хлыста dбр =0,2-0,4м.
Сила обжатия Роб приложена к середине челюсти и линия ее действия проходит через центр захвата, поэтому можно определить усилие в тяге согласования:
Рт |
Роб R |
(5.16) |
|
h5 |
|||
|
|

40
а затем по расчетным формулам для захвата-модели определить все остальные силы, в т.ч. потребное усилие в гидроцилиндре:
Pц |
Р р h1 |
Рт h5 |
(5.17) |
|
h1 |
||
|
|
|
Определить диаметр потребного гидроцилиндра и выбрать его по ГОСТу:
Dц |
4Рц |
. |
(5.18) |
|
|||
|
|
|
|
2. СОСТАВЛЕНИЕ ОТЧЕТА.
Замеры геометрических параметров захвата-модели и заполнения таблицы Таблица 5.1
Па- |
Mg |
R |
h |
L |
Dц |
W |
dn |
h1 |
h2 |
h3 |
h4 |
h5 |
раметры |
кг |
м |
м |
м |
м |
см |
м |
м |
м |
м |
м |
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
Захвата- |
|
|
|
|
|
|
|
|
|
|
|
|
модели |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проектируе- |
|
|
|
|
|
|
|
|
|
|
|
|
мого захвата |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Построение масштабной кинематической схемы захвата-модели с нанесением всех размеров.
Определение силовых и прочностных характеристик захвата-модели. В этом разделе приводятся расчетная схема захвата и формулы 1-10 с пояснениями, результаты расчетов заносятся в табл.5.1.
Определение геометрических параметров проектируемого захвата с использованием метода геометрического подобия. В этом же разделе приводятся формулы 10-15 с пояснениями и результаты расчетов заносятся в табл. 5.1.
Построение масштабной кинематической схемы проектируемого захвата. Анализ табличных данных для захвата-модели и проектируемого захвата на соответствие геометрического и физического подобия конструктивных и си-
ловых параметров.