

4406
.pdf11
ляются по разности перемещений, измеренных в двух сечениях. Для контроля правильности составления баланса целесообразна постановка дополнительных приборов для непосредственного измерения величин, определѐнных пересчетом по показаниям других приборов. В частности, целесообразно непосредственно измерять смещения точки приложения силы.
На подготовленный к проведению исследования станок или узел станка устанавливается нагрузочное устройство. По разработанной схеме устанавливаются приборы. Расположение приборов на станке фиксируется по схеме в выбранных осях координат; координаты каждого прибора заносят в протокол. Всѐ приборы, предусмотренные схемой, одновременно установить на станке не всегда представляѐтся возможным. Поэтому приходиться ставить приборы группами и проводить измерения последовательно, сначала одной группой потом другой и т. д.
Порядок проведения испытания тот же, что и при определении суммарной жесткости с тем отличием, что показания приборов записываются только при нагружении без фиксации при разгрузки. Целесообразно определение суммарной жесткости совместить с построением баланса.
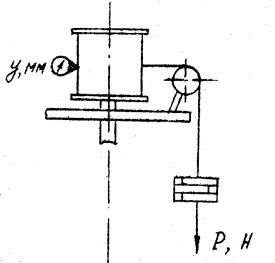
На рис. 1.3 показана схема нагружения и расстановки приборов при составлении укрупненного баланса упругих перемещений шпиндельного узла.
Рисунок 1.3 – Схема нагружения и расстановки приборов при составлении укрупненного баланса упругих перемещений шпиндельного узла.
Индикатором 1 измеряется суммарное перемещение узла от действия силы Р относительно станины станка. Индикатор 2 совмещѐн с индикатором 1,
12
поэтому испытание следует проводить последовательно в два этапа. Так как индикатор 2 закрепляется на корпусе шпинделя, то его показание включают перемещения от изгиба шпинделя и осадки опор. Индикаторами 3 и 4 измеряются отжатия А и Б в опорах А и Б соответственно. Для определения перемещения у0 в точке приложения следует воспользоваться формулой (12). Использовать индикаторы 3 и 4 целесообразно только в том случае, если можно установить в непосредственной близости от подшипников в опорах. В противном случае в их показания будет внесено дополнительно перемещение от изгиба шпинделя. Индикаторы 5 и 6 фиксирует перемещение салазок суппорта относительно направляющих. Показания этих индикаторов нужно пересчитать к точке приложения нагрузки Р по формуле
усал у6 |
Х 5 |
у5 ( 1 |
Х 5 |
|
|
|
. |
||
Х6 Х 5 |
Х6 Х 5 |
|||
Балансом перемещений узла будет
у1 = у2 + усал
Всвою очередь у2 складывается из двух составляющих: изгиба шпинделя
иосадки опор.
Каждое слагаемое баланса вычисляют в процентах от общего перемещения.
2. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1.Перед проведением работа необходимо изучить 1 раздел данной работы и ответить на контрольные вопросы. В лаборатории ознакомиться с конструкцией исследуемого узла, нагрузочные устройством и его тарировочным графиком.
2.Составить схему нагружения узла и расстановки измерительных приборов для измерения суммарной жѐсткости узла и составления баланса упругих перемещений.
3.Произвести установку нагрузочного устройства и всех приборов на испытательном стенде по разработанной схеме.
4.Провести измерения и данные занести в протокол журнала.
5.Построить характеристику перемещения узла и определитьего жѐсткость.
13
6.Пересчитать перемещения к точке приложения нагрузки, где это необходимо.
7.Составить эскиз шпинделя, его расчетную схему и рассчитать деформаций прогиба и отжатия в опорах.
8.Составить укрупненный баланс упругих перемещений узла с указанием абсолютных перемещений элементов узла и в процентах.
9.В заключении по работе указать о неточности составления баланса, т.е. отклонении от 100%, указать на слабые элементы узла и сопоставить фактическую жѐсткость узла с жѐсткостью аналогичных узлов по литературным источникам.
3.КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Что такое жѐсткость станка и на что она влияет?
2.Как определить суммарную статическую жѐсткость станка или его элементов?
3.Из чего складываются перемещения в станках?
4.Какие приборы используются для измерения жѐсткости станков?
5.Как установить силу нагружения при измерении жесткости станка?
6.Как построить характеристику перемещения станка, с какой целью производят ее построение?
7.С какой целью составляется баланс упругих перемещений станка и его составных частей?
8.В чѐм заключается подготовка к проведению баланса упругих перемещений станка?
9.Каков порядок проведения испытаний станка при составлении баланса упругих перемещений?
14
ЛАБОРАТОРНАЯ РАБОТА № 2
ИСПЫТАНИЕ СТАНКОВ НА ЖЕСТКОСТЬ В СТАТИЧЕСКОМ И ДИНАМИЧЕСКОМ РЕЖИМЕ
Цель работы: освоение методологии и приобретение практических навыков испытаний станков на жѐсткость в двух режимах: статическом (при = 0) и динамическом (при 0), анализ причин изменения жѐсткости на примере консольного шпиндельного узла.
I. ОБЩИЕ ПОЛОЖЕНИЯ
Статическая жесткость – является начальной характеристикой объекта и, как показано в лабораторной работе "Исследование статической жесткости шпиндельного узла дереворежущего станка", определяется отношением статической нагрузки к упругому перемещению объекта (рис. 2.1)
Рисунок 2.1 – Схема проверки статической жѐсткости
j |
P |
(2.1) |
|
У |
|||
|
|
На развитие упругих перемещений консольных шпиндельных узлов оказывают влияние следующие причины:
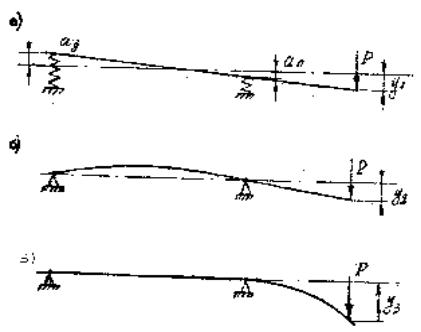
1. - Упругая податливость элементов конструкции. При угловой частоте вращения = 0 нагружение консоли шпиндельного узла приводит к упругим деформациям шпинделя в передней и задней опорах. Консольная часть шпинделя получает упругое перемещение у = 0 рис. 2.2.
15
Рисунок 2.2 – Упругая податливость элементов конструкции: а) опор; б) межопорной части; в) консольной части
у = 0 = у1 + у2 + у3 |
(2.2) |
где у1 – перемещение консольной части шпинделя в результате упругого смещения в передней опоре ап и задней опоре аз;
у2 – перемещение консольной части шпинделя в результате упругой деформации межопорной части шпинделя;
у3 - перемещение консольной части шпинделя в результате еѐ упругой деформации.
2.Геометрические погрешности, изготовления и сбора деталей, входящих
всостав шпиндельного узла (подшипников, шпинделя, гильзы). В результате погрешностей изготовления и сборки возникает эксцентриситет между действительной осью вращения и геометрической (идеальной). Наличие эксцентри-
ситета при >0 вызывает появление динамической несимметрии (дисбаланса) вращающихся частей шпиндельного узла, в свою очередь динамическая несимметрия развивает центробежную силу F, которая предопределяет возникновение упругих перемещений.
3. Конструктивные параметры шпиндельного узла, (длина и диаметр консольной и межопорной части, модуль упругости материала шпинделя, масса вращающихся частей, частота вращения шпинделя, жѐсткость опор). Конструктив-
16
ные параметры по – разному способствуют развитию упругих перемещений. Так с уменьшением длины консольной части ее жесткость возрастает, при этом упругие перемещения уменьшаются, с увеличением, диаметров и массы жесткость возрастает, увеличение жесткости опор снижает упругие перемещения в них и т.д.
В динамическом режиме жесткостью называется способность тела оказывать сопротивление деформирующему воздействию внешних сил. Однако жесткость одного и того же объекта в статическом и динамической режимах различна.
Консольный шпиндельный узел можно представить как твердое тело, совершающее вращательное движение. В механике подобные тела считают гироскопами. Твердое тело является упрощѐнной моделью реального тела. Это допущение позволяет в теории обходиться обыкновенными дифференциальными уравнениями.
Свойства гироскопов следуют из основных законов механики и зависят от:
-распределения массы тела;
-характера действующих на них сил;
-начального состояния движения;
-связей гироскопа с окружающими его телами.
В режиме фрезерования на шпиндельный узел действует внешние силы, основными из которых являются: нормальная к направлению подачи составляющая силы резания S2 и центробежная сила от дисбаланса инструмента F. В формуле (2.3) обе силы учитывается в виде векторной суммы
|
|
Р S 2 F |
|
(2.3) |
При > 0 в шпиндельном узде помимо внешних нагрузок, возникает ги- |
||||
роскопический момент MГ, который может стабилизировать или дестабилизи- |
||||
ровать систему. |
|
|
|
|
М |
Г |
( А С ) Sin 2 , |
(2.4) |
|
|
|
|
|
|
где А - поперечный момент инерции шпиндельного узла относительно центра тяжести системы;
С - осевой момент инерции относительно оси BРАЩЕНИЯ
- угол нутации (угол отклонения действительной оси вращения от геометрической).
Для инструмента типа плоского диска (рис. 2.2а) (круглые пилы, проушечные диски и т.п.) выполняется неравенство А С. В этой случае гироскопический момент стабилизирует систему. Для консольного шпиндельного
17
узла, несущего на консоли инструмент типа продолговатого цилиндра (ножевая головка) (рис. 2.2б), выполняется неравенство A С. Это означает, что гироскопический момент дестабилизирует систему, вызывая дополнительное упругое перемещение шпинделя за счѐт перераспределения масс в результате разворота оси собственного вращения.
Дестабилизирующее воздействие гироскопического эффекта вызывает падение жѐсткости и уменьшение собственной частоты в динамическом режиме.
В общем случае упругие перемещения шпиндельного узла описываются системой линеаризованных уравнений
y 11P 12M |
(2.5) |
|
21P 22M |
||
|
где у – упругое (линейное) перемещение шпиндельного узла в точке при ложения нагрузки;- угловое перемещение;
М'- гироскопический момент;11 - коэффициент линейного перемещения от единичной силы
12 - коэффициент линейного перемещения от действия единичного момента;
21 - коэффициент углового перемещения от единичной силы21 - коэффициент углового перемещения от единичного момента. Р- действующая сила ;
Коэффициенты 11, 12, 21, 22, называются коэффициентами влияния. Под действующей силой подразумевается совместное действие на шпиндельный узел силы резания и центробежной силы от дисбаланса инструмента, шпинделя и шкива. Примем допущение
Р |
|
me 2 , |
(2.6) |
F |
где те – дисбаланс.
Уравнение линейного перемещения (5) с учетом (4) и (6) имеет вид.
у |
н |
me 2 |
|
12 |
( A C ) 2Sin . |
(2.7) |
|
|
|
|
|

18
Гироскопический момент относительно центральных осей инерции можно выразить уравнением
М |
Г |
J |
yz |
2 |
me S 2 , |
(2.8) |
|
|
|
|
|
где Jyz = Jxy — момент инерции относительно центральных осей. Приравнивая правые части уравнений (2.4) и (2.8), получим
( A C ) 2 Sin J |
yz |
2 , |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
J yz |
|
|
|
|
meS |
|
|
|
|
|
(2.9) |
|
Sin |
|
|
|
|
|
|
|
|
||||||
A C |
A C |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||
Уравнение (2.7) с учетом (2.9) принимает вид |
|
|
||||||||||||
2 |
|
|
2 |
|
meS |
|
|
|
2 |
|
|
|
||
у me 11 |
( A C ) |
|
|
|
|
|
12 me |
|
( 11 |
12S ) , |
(2.10) |
|||
|
|
|
A C |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где S - координата от центра тяжести инструмента до центра тяжести шпиндельного узда.
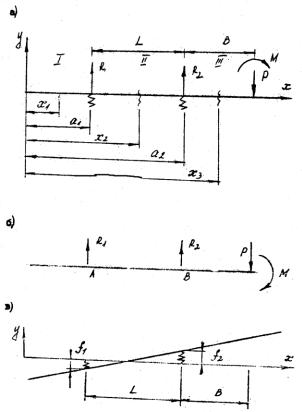
Коэффициенты влияния определяются с использованием теории упругой балки. Уравнение изогнутой оси имеет вид
у М х , |
(2.11) |
где 1
EJ
EJ — погонная жесткость балки;
y=f(x) - перемещение центра тяжести в соответствующем сечении х (рис.
2.3);
- угол поворота сечения;
Mx - изгибающий момент в соответствующем сечении,
Мх = - R1 (x – a1) - R2(x – a2)
Интегрируя с учетом ухх х , |
|
d y |
|
, |
|
получим: |
d x |
|
|
||||
|
|
|
|
|
|
|
о M xd x |
|
|
|
|
, |
(12) |
y fo ox M xd xd x |
||||||
где f0, 0 - прогиб и угол поворота на левом конце балки (рис. 5, а)
19
Рисунок 2.3 – Схема для расчѐтов коэффициентов влияния
|
1 |
|
( x a )3 |
|
R ( x a |
2 |
)3 |
|
f( x ) fo ox |
|
R1 |
1 |
|
2 |
|
|
|
EJ |
3! |
3! |
|
|
|
|||
|
|
|
|
|
|
|||
f1 f ( a1 ) |
|
|
|
|
|
|
(2.13) |
|
f2 f ( a2 ) |
|
|
|
|
|
|
|
|
f1 - упругое перемещение в нижней опоре (рис 5 ,в); f2 - упругое перемещение в верхней опоре.
f |
1 |
|
R1 |
; |
f |
2 |
|
R2 |
(2.14) |
|
|
||||||||||
j2 |
j1 |
|||||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
j1 упругое перемещение в верхней опоре; j2 упругое перемещение в нижней опоре.
20
f1 f0 a a1 , |
|
|
|
|
|
|
|
|
|
||||
|
f0 |
o ( a |
1 ) |
1 R1L3 |
f1 0 L |
R1L3 |
|||||||
f2 |
|
|
|
|
, |
||||||||
EJ 6 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
6 EJ |
||||
|
|
f2 |
f1 |
R1L3 |
|
|
|
|
|
|
|
||
f0 |
|
6 EJ |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||
|
L |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перемещение правого конца балки (рис. 2.3,а) определяем с учетом x = a1 + L + B
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R ( L B ) |
|
|
R B3 |
|
||||||||||||||||
|
|
|
|
|
y f0 0 ( a1 |
|
L B ) |
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
6 EJ |
|
|
|
|
|
|
|
6 EJ |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
R1 |
|
L B |
f |
2 |
|
L B |
|
|
R1 |
|
|
L B |
|
L |
3R1 |
|
|
. |
(2.15) |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
d2 |
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
L |
|
|
|
|
d2 |
|
L |
|
|
|
|
|
|
|
|
6 EJ |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
R ( L B )3 |
|
|
|
|
|
R B3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
6 EJ |
|
|
|
6 EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Из рис.2.3 ,б находим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
М А R2 L P( L B ) M 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
M B R1L PB M 0 |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
(2.16) |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
R |
|
|
|
|
M |
P |
L B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
L |
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
R |
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
L |
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Подставив (2.14) и (2.16) в (2.15), получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
( L B ) |
2 |
|
|
B |
2 |
|
|
|
|
|
( L B ) |
|
2B |
2 |
|
|
|
|
|
|
|
B L |
|
|
|
|
|
B |
|
|
|
|
B( 3B 2L |
|
|||||||||||||||||||||||||
y P |
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
(2.17) |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
L2 j |
|
L2 j |
|
|
|
|
|
|
|
6 EJ |
|
|
|
|
|
|
L2 j |
|
L2 j |
|
|
|
|
|
6 EJ |
|||||||||||||||||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||||||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Из выражения (2.17) выпишем коэффициенты влияния |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
11 |
|
( L B )2 |
|
|
|
|
B2 |
|
|
|
|
( L B )B |
2 |
|
; |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
L2 j1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L2 j2 |
|
|
|
3EJ |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
(2.18) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B L |
|
|
|
|
|
|
|
|
|
|
|
|
|
( 3B 2L )B |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
12 |
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L2 |
|
|
|
L2 j2 |
|
|
|
|
|
6 EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
где J D2
64