

2517
.pdfИсходя из вышесказанного, можно составить структурную схему математической модели РО (рис. 2.7). Коэффициенты передачи и постоянные структурной схемы:
C O A2 |
O B2 , |
C |
2 |
arctg |
AD |
; |
(2.18) |
||||
|
|||||||||||
1 |
2 |
|
2 |
|
|
|
O2D |
|
|
||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
k1 |
|
|
|
|
|
, k2 O2E . |
|
(2.19) |
||
|
O A2 |
O B2 |
|
|
|
||||||
|
|
|
2 |
|
2 |
|
|
|
|
|
|
Рис. 2.7. Структурная схема математической модели рабочего органа
2.4. Математическая модель неровностей микрорельефа
Анализ процесса управления РО ЦТЭ показал, что одним из важнейших факторов, определяющих точность формирования траншеи, является микрорельеф грунтовой поверхности, неровности которой приводят к стохастическим вертикальным и угловым перемещениям ЦТЭ при движении машины и, следовательно, к
неуправляемым перемещениям РО. Таким образом, составление математической модели микрорельефа является важным этапом в разработке обобщенной математической модели рабочего процесса ЦТЭ. Это позволит установить основные закономерности движения ЦТЭ по опорной поверхности, соответствующей реальной, выявить
67

характер влияния микрорельефа на точность формирования дна траншеи.
Для моделирования микрорельефа левой и правой колеи в работе использовались корреляционные функции двух типов, определяемые выражениями /58, 80, 91, 101/
для левой колеи:
|
|
|
|
R(t) = σ2 · e-α|τ|; |
|
|
|
|
|
|
|
|
(2.20) |
|||||||
|
для правой колеи: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R(t) = σ2 · e-α|τ| cos(β |τ|). |
(2.21) |
||||||||||||||||||
Для реализации моделей микрорельефа грунтовой поверхности на |
||||||||||||||||||||
ЭВМ использовались следующие рекуррентные уравнения: |
|
|||||||||||||||||||
|
для уравнения (2.20): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
z (i) = d0 · x(i) + b1 · z(i – 1); |
(2.22) |
||||||||||||||||||
|
для уравнения (2.21): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
z (i) = d0 · x(i) + d1 x(i – 1) – b1 · z(i – 1) – b2 z(i – 2), |
(2.23) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p2 4p2 |
|
|
|
|
|||||
|
где d |
0 |
|
|
p |
|
|
1 |
0 |
; |
|
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d1 |
|
|
|
p0 |
|
|
|
|
|
; |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
p2 |
4p |
2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
p |
|
|
1 |
|
0 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b1 = 2 · e –αn · cos(β·n); |
b2 = –e –2α·n; |
|
|||||||||||||||||
p0 = e –α·n (e –2α·n – 1) · cos(β·n); p1 = 1 – e –4α·n,
где – среднеквадратическое отклонение исходного микрорельефа;
, – коэффициенты затухания и периодичности корреляционной функции; n – шаг дискретного времени ti.
Переход от текущего времени ti к координате пути xi: xi = V · ti.
68
При составлении программы на ЭВМ микрорельеф был сглажен по пятну контакта шины с микрорельефом /15, 56, 69, 80, 101/:
1 |
|
i k |
|
||
z(m) |
|
|
z(i), |
(2.24) |
|
x0 |
|||||
|
|
m i k |
|
||
где z(m) – ординаты сглаженного микрорельефа; k = 0,5(x0 – 1); x0 –
интервал усреднения; z(i) – ординаты несглаженного микрорельефа.
69
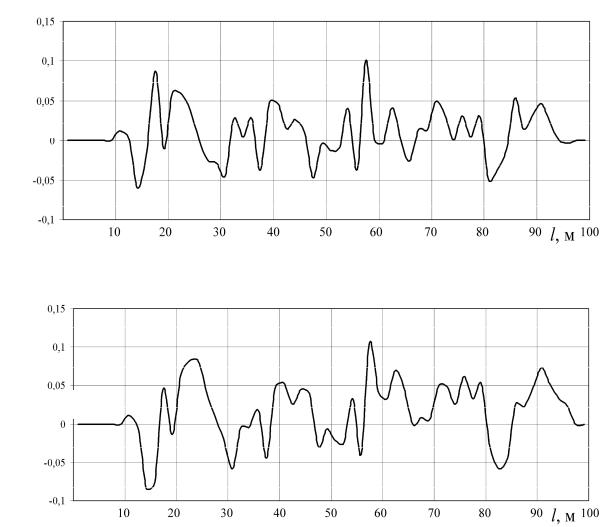
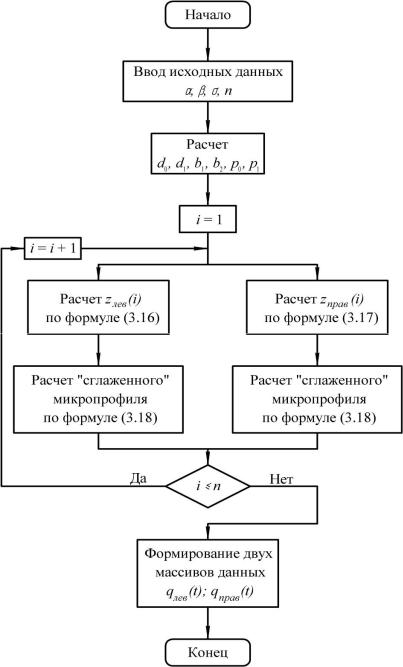
Рис. 2.8. Блок-схема программы, реализующей вертикальные
координаты микропрофиля
На основании указанных уравнений была составлена программа в среде MatLab для реализации микрорельефа на ЭВМ. Блок-схема программы приведена на рис. 2.8.
qЛЕВ, м
Рис. 2.9. Фрагмент реализации микрорельефа по левой колее
qПРАВ, м
Рис. 2.10. Фрагмент реализации микрорельефа по правой колее
70
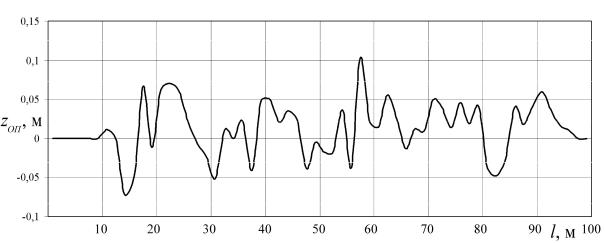
Рис. 2.11. Координата условной средней точки переднего моста ЦТЭ
На рис. 2.9 и 2.10 в качестве примера приведены фрагменты реализации сглаженного микрорельефа для левой и правой колеи.
На рис. 2.11 представлена реализация изменений точки переднего моста при движении ЦТЭ по данным микрорельефам.
Приведенная выше математическая модель позволяет моделировать неровности микрорельефа грунта с заданными характеристиками.
2.5. Математическая модель гидропривода
Одной из важнейших подсистем сложной динамической системы ЦТЭ является электрогидравлический привод РО, осуществляющий его перемещение относительно базовой машины и соответственно изменяющий глубину траншеи. Статические и динамические характеристики гидропривода существенно влияют на процесс управления РО и должны быть учтены при совершенствовании СУ положением РО ЦТЭ.
71
Для достижения поставленной в работе цели, с учетом
вышесказанного необходимо составить математическую модель
гидропривода, удовлетворяющую следующим требованиям:
учет динамических характеристик отдельных элементов гидропривода;
возможность изменения скорости перемещения РО;
учет нагрузки на шток гидроцилиндра со стороны РО, разрабатывающего грунт.
В настоящее время можно выделить два направления
математического описания гидроприводов /16, 21, 31, 58, 70, 81, 82, 90, 101/.
Первое направление заключается в представлении гидроэлементов в виде передаточных функций типовых динамических звеньев. Представление элементов гидропривода в виде передаточных функций основывается на экспериментальных исследованиях, при этом реальный переходный процесс элементов гидропривода аппроксимируется с необходимой точностью переходными функциями типовых динамических звеньев.
Точность моделирования гидропривода при этом способе определяется точностью аппроксимации переходных процессов и точностью измерений, проводимых в ходе эксперимента. При этом способе достаточно сложно учесть большое количество параметров,
влияющих на работу гидропривода, что ведет к упрощению математической модели гидропривода в целом.
Второе направление заключается в том, что для каждого из элементов, входящих в гидропривод, составляется своя математическая модель, представляющая собой систему дифференциальных и алгебраических уравнений, а затем в результате
72
композиции находится система уравнений, описывающих гидропривод машины в целом.
Данный способ обладает высокой точностью описания динамических процессов, происходящих в гидроприводе, и при наличии мощных вычислительных систем легко реализуется на ЭВМ.
Основные элементы гидроприводов в настоящее время достаточно хорошо изучены и в зависимости от решаемых задач, математически описаны с теми или иными допущениями.
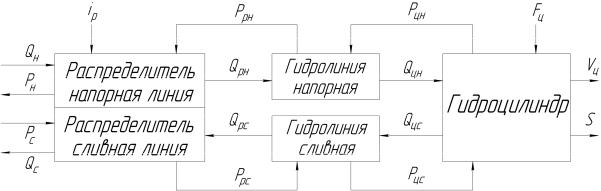
На рис. 2.12 представлена блок-схема фрагмента гидропривода РО ЦТЭ, элементами которой являются: электрогидравлический распределитель, гидролиния и гидроцилиндр. Гидронасос, клапаны,
фильтр и другие элементы, не оказывающие существенного влияния на переходные процессы в рабочем режиме, не рассматриваются.
Рис. 2.12. Блок-схема гидропривода рабочего органа цепного
траншейного экскаватора
При составлении математической модели гидропривода были
приняты следующие допущения:
73

объемный модуль упругости рабочей жидкости в период исследуемого процесса постоянен;
инерционные свойства потока рабочей жидкости в связи с их сравнительной малостью не учитываются;
волновые процессы в элементах гидропривода в связи с их незначительной длиной не учитываются;
подача насоса в период исследуемого процесса постоянна;
утечки жидкости в гидроэлементах не учитываются;
силы сухого трения в гидроцилиндре, в связи с их сравнительной малостью, не учитываются.
Математическая модель гидролинии. Для ЦТЭ характерны
относительно небольшие длины гидролиний (менее 5м), сравнительно невысокое быстродействие распределительной аппаратуры и невысокие рабочие давления (не превышающие 32 МПа). Это позволяет представить их математическими моделями с сосредоточенными параметрами.
Напорная гидролиния, соединяющая распределитель с гидроцилиндром, представлена уравнениями /6, 31, 70, 81, 101/
QЦН QРН dPРН kУПР.ТР ;
dt
|
|
|
8 L |
|
|
Q |
РН |
Q |
ЦН |
|
Q |
РН |
Q |
ЦН |
|
|
(2.25) |
|||
PРН |
PЦН |
|
|
|
ТР |
|
|
|
|
|
|
|
|
, |
||||||
|
2 |
5 |
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
||||
|
|
|
|
g dТР |
|
|
|
|
|
|
|
|
|
|
|
|
||||
где QРН, QЦН – расходы рабочей жидкости соответственно на входе и выходе из напорной гидролинии; dТР – диаметр напорной гидролинии;
LТР – длина напорной гидролинии; PРН, PЦН – давления соответственно на входе и выходе из напорной гидролинии; γ –
удельный вес рабочей жидкости; g – ускорение свободного падения.
74
В уравнениях (2.25): коэффициент упругости трубопровода с жидкостью /6, 31, 70, 81, 101/
|
|
d2 |
L |
|
|
k |
|
ТР |
ТР |
; |
(2.26) |
|
|
||||
УПР.ТР |
|
4 EПР |
|
||
|
|
|
|||
приведенный объемный модуль упругости трубопровода с жидкостью
/6, 31, 70, 81, 101/
EПР |
|
E |
Ж |
|
|
|
; |
(2.27) |
||
|
dТР |
|
|
E |
|
|||||
|
1 |
|
|
Ж |
|
|
|
|||
|
|
|
|
|
|
|||||
ТР EСТ
коэффициент потерь давления по длине /6, 31, 70, 81, 101/
75 |
при RЕ |
2300; |
|
|
||
|
|
; |
(2.28) |
|||
|
||||||
RЕ |
|
|
|
|||
|
0,25 |
при RЕ |
2300; |
|
||
0,3164 RЕ |
|
|
||||
число Рейнольдса /6, 31, 70, 81, 101/: |
|
|||||||
RЕ |
|
2 |
|
QРН QЦН |
|
|
, |
(2.29) |
|
|
|||||||
|
|
|||||||
|
|
|
|
|
||||
|
|
dТР vЖ |
|
|||||
где EСТ – модуль упругости материала стенки напорной гидролинии;
δТР – толщина стенки напорной гидролинии; νЖ – коэффициент кинематической вязкости рабочей жидкости; EЖ – объемный модуль упругости рабочей жидкости.
Уравнения (2.25)…(2.29) позволяют представить напорную гидролинию в виде структурной схемы (рис. 2.13).
75
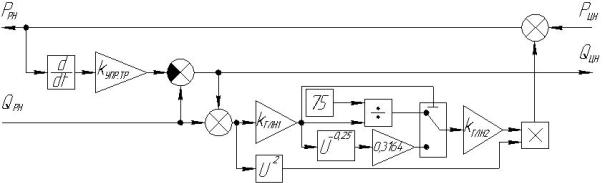
Рис. 2.13. Структурная схема напорной гидролинии
Значения коэффициентов передачи этой структурной схемы:
kГЛН1 |
2 LТР |
; |
|
(2.30) |
|
|
|
||||
|
2 dТР5 |
|
|
||
kГЛН2 |
2 |
|
. |
(2.31) |
|
dТР Ж |
|||||
|
|
|
|||
Сливная гидролиния, соединяющая гидроцилиндр с распределителем, представлена уравнениями /6, 31, 70, 81, 101/:
|
|
Q |
|
Q |
|
|
dPЦС |
k |
|
|
|
|
; |
|
|
|
|
|||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||||
|
|
РС |
|
|
ЦС |
|
|
|
УПР.ТР |
|
|
|
|
|
||||||
|
|
|
8 L |
|
|
|
QЦС |
QРС |
|
QЦС |
QРС |
|
(2.32) |
|||||||
|
|
|
|
|
|
|
|
|||||||||||||
P |
P |
|
|
|
|
ТР |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||
ЦС |
РС |
|
|
|
|
5 |
|
|
|
2 |
|
|
|
|
2 |
|
|
|
||
|
|
|
|
g dТР |
|
|
|
|
|
|
|
|
|
|||||||
где QЦС, QРС – расходы рабочей жидкости соответственно на входе и выходе из сливной гидролинии; dТР – диаметр сливной гидролинии;
LТР – длина сливной гидролинии; PРС, PЦС – давления соответственно на входе и выходе из сливной гидролинии; γ – удельный вес рабочей жидкости; g – ускорение свободного падения.
76