

2517
.pdfОбобщенная расчетная схема динамической системы ЦТЭ
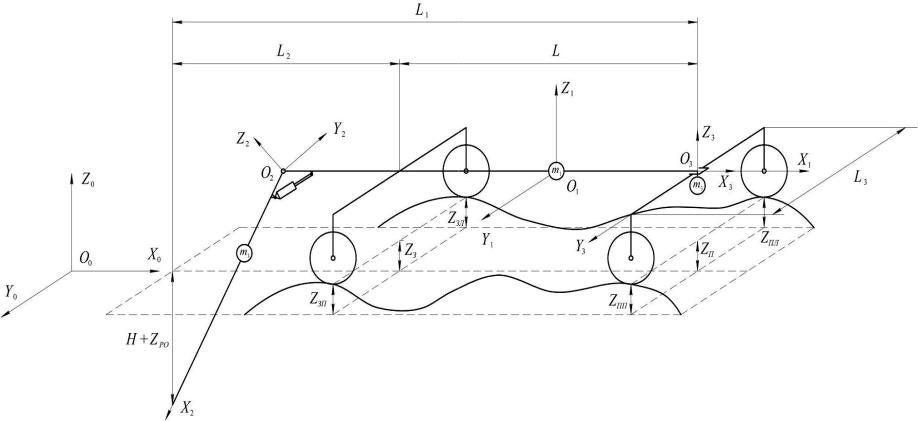
(рис. 2.2) представляет собой систему из трех звеньев с сосредоточенными массами:
– базовый трактор массой m1, включающий в себя массы остова,
двигателя, редуктора привода РО с механизмом подъема,
ходоуменьшителя, установки гидросистемы, бульдозерного агрегата.
Центр масс первого звена находится в точке O1;
– РО массой m2, включающий в себя массы рамы РО с натяжным
устройством, отвальных шнеков, рабочей цепи, зачистного башмака;
– передний мост массой m3.
Массы перечисленных звеньев формируют в поле тяготения силы
тяжести, представленные на расчетной схеме векторами Fgi: |
|
Fgi 0,Fgi,0 T . |
(2.1) |
Реакции грунта на элементы ходового оборудования |
|
представлены на расчетной схеме силами Fi , i = 1..4 |
|
Fi 0,Fiz,0 T . |
(2.2) |
Реакция грунта на РО на расчетной схеме представлена вектором |
|
силы F5 |
|
F5 F5x,F5z,F5y T . |
(2.3) |
Со стороны гидропривода на рабочее оборудование действует момент силы M .
Положение звеньев расчетной схемы (рис. 2.2) определяется положением соответствующих правых локальных систем координат.
57
Таблица 2.2
Степени свободы пространственной колебательной
динамической системы цепного траншейного экскаватора
Степень |
Независ. |
Значение |
|
свободы |
перемен. |
||
|
|||
|
|
|
|
q1 |
Z1 |
Перемещение центра масс точки O1 вдоль оси O0Z0 |
|
|
|
|
|
q2 |
1 |
Поворот рамы машины вокруг оси O1X1 |
|
q3 |
1 |
Поворот рамы машины вокруг оси O1Y1 |
|
|
|
|
|
q4 |
2 |
Поворот рабочего органа вокруг оси O2Y2 |
|
|
|
|
|
q5 |
2 |
Поворот переднего моста вокруг оси O3X3 |
Для пространственной динамической системы ЦТЭ (см. рис. 2.2)
приняты пять степеней свободы qj (j = 1...5), представленные в табл. 2.2.
Упруговязкие свойства динамических связей, представленные на схеме (см. рис. 2.2) в виде тел Фохта, характеризуются в динамических моделях гидроцилиндра рабочего оборудования коэффициентом жесткости С5 и коэффициентом вязкости b5, в
динамических моделях ходового оборудования и грунта – коэффициентами С1–С4 и b1–b4 соответственно.
Исходя из вышеизложенного, можно сделать вывод, что предложенная расчетная схема отражает наиболее общие признаки динамической системы ЦТЭ и может быть использована для вывода уравнений геометрической связи между звеньями расчетной схемы,
уравнений статики и динамики ЦТЭ.
58
На основе представленной расчетной схемы с учетом
наложенных на нее допущений может быть составлена структурная
схема математической модели ЦТЭ.
2.3. Уравнения геометрических связей звеньев цепного
траншейного экскаватора
Для составления структурной схемы математической модели
машины необходимо принять допущения /101, 102/:
рассматриваются изменения больших значений обобщенных координат звеньев расчетной схемы;
режущая кромка РО в процессе копания не выглубляется;
машина представлена упрощенно в виде многозвенника, отражающего раму машины с двигателем, трансмиссией, задней осью
изадними колесами; переднюю ось с колесами; РО;
РО шарнирно крепится к раме и зафиксирован гидроцилиндром;
звенья многозвенника и опорная поверхность абсолютно жесткие;
колеса от опорной поверхности не отрываются и имеют с ней точечный контакт.
С учетом принятых допущений можно составить упрощенную
пространственную расчетную схему ЦТЭ, которая представлена на
рис. 2.3.
59
60
Рис. 2.3. Упрощенная пространственная расчетная схема цепного траншейного экскаватора
Для выполнения расчетов в инерциальной системе координат
O0X0Z0Y0 задается плоскость отсчета, обозначенная пунктиром и
проходящая через оси O0X0 и O0Y0.
Расстояния до колес и рабочего органа от этой плоскости
обозначены:
ZПП – высота неровностей микрорельефа под передним правым
колесом;
ZПЛ – высота неровностей микрорельефа под передним левым
колесом;
ZЗП – высота неровностей микрорельефа под задним правым
колесом;
ZЗЛ – высота неровностей микрорельефа под задним левым
колесом;
ZРО – изменение глубины копания ЦТЭ в инерциальной системе
координат в результате воздействия неровностей микрорельфа.
На рис. 2.3 даны следующие обозначения:
L – длина базы ЦТЭ;
L1 – расстояние от оси передних колес до режущей кромки РО,
формирующей дно траншеи;
L2 – расстоянии от оси задних колес до режущей кромки РО,
формирующей дно траншеи;
L3 – ширина базы машины.
Для составления уравнений геометрической связи введено
понятие коэффициента базы КБ /101, 102/: |
|
|||
KБ |
|
L1 |
. |
(2.4) |
|
||||
|
|
L |
|
|
Особенность ЦТЭ состоит в том, что элементы ходового
61
оборудования перемещаются по необработанному микрорельефу
/101, 102/
ZЗ (t) = ZП (t – τL), |
(2.5) |
где τL – время, необходимое для прохождения ЦТЭ расстояния L.
L |
|
L |
, |
(2.6) |
|
||||
|
V |
|
||
здесь V – скорость поступательного движения ЦТЭ.
Из рис. 2.3 можно записать /101, 102/
Z |
РО |
Z |
П |
L2 |
Z |
З |
L1 |
; |
(2.7) |
||||
L |
|
|
|
||||||||||
|
|
|
|
|
L |
|
|||||||
|
ZП |
|
ZПЛ ZПП |
; |
(2.8) |
||||||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
ZЗ |
|
ZЗЛ |
ZЗП |
. |
(2.9) |
|||||||
|
|
|
|||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
Проведя преобразования (2.7) с учетом (2.4), получим /101, 102/
ZРО = (1 – KБ) ZП + KБ ZЗ . |
(2.10) |
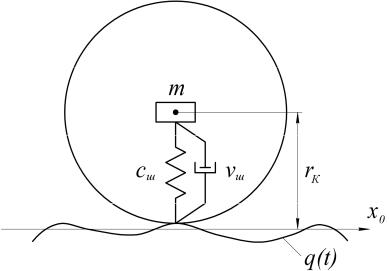
Рис. 2.4. Расчетная схема вертикальных перемещений оси колеса
62
До настоящего момента мы предполагали, что радиус качения колеса принимается постоянным. Однако для внедорожных колесных машин такое допущение часто является слишком грубым. Колебания отдельной оси машины можно представить в виде одномассной системы (рис. 2.4) /38, 70/
(2.11)
где m – масса, приходящаяся на ось; vШ – коэффициент демпфирования шин; cШ – коэффициент жесткости шин; Z –
вертикальная координата перемещения оси; q(t) – неровности профиля дороги.
Тогда радиус качения колеса необходимо представить в виде:
rК = r – zСТ – z, (2.12)
где r – свободный радиус колеса; zСТ – статический прогиб колеса под нагрузкой; z – динамическое изменение прогиба колеса.
Систему уравнений, описывающую работу движителя с учетом изменения радиуса колеса, можно записать в виде
Z |
1 |
v |
Ш Z c |
Ш Z q(x) ; rК = rСТ – z. |
(2.13) |
|
|||||
|
m |
|
|
|
|
Исходя из вышеизложенного, была составлена структурная схема уравнений геометрических связей звеньев ЦТЭ, которая представлена на рис. 2.5.
63
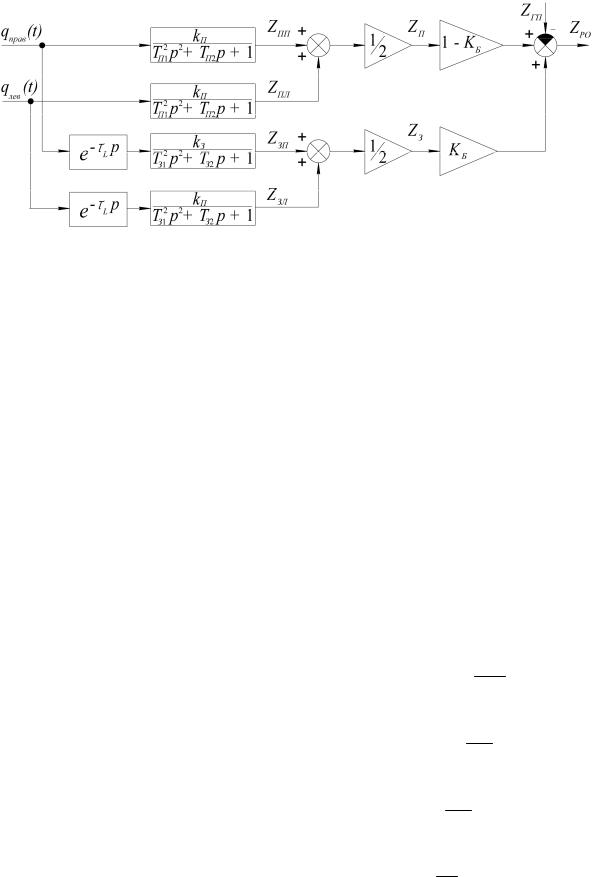
Рис. 2.5. Структурная схема ЦТЭ
На рис. 2.5 даны следующие обозначения:
qПРАВ(t) – высота неровностей микрорельефа правой колеи; qЛЕВ(t) – высота неровностей микрорельефа левой колеи;
τL – время, за которое ЦТЭ проедет расстояние L (расстояние между осями);
kП – коэффициент передачи переднего колеса, kП = 1 / сП, где сП –
коэффициент жесткости передней шины;
kЗ – коэффициент передачи заднего колеса, kЗ = 1 / сЗ, где сЗ –
коэффициент жесткости задней шины;
TП1 – постоянная времени переднего колеса, TП12 mП ; cП
TП2 – постоянная времени переднего колеса, TП1 П ; cП
TЗ1 – постоянная времени заднего колеса, TЗ12 mЗ ; cЗ
TЗ2 – постоянная времени заднего колеса, TЗ1 З . cЗ
64
На рисунке введено дополнительное воздействие ZГП. Это перемещение РО в вертикальной плоскости гидроприводом подъема-
опускания РО.
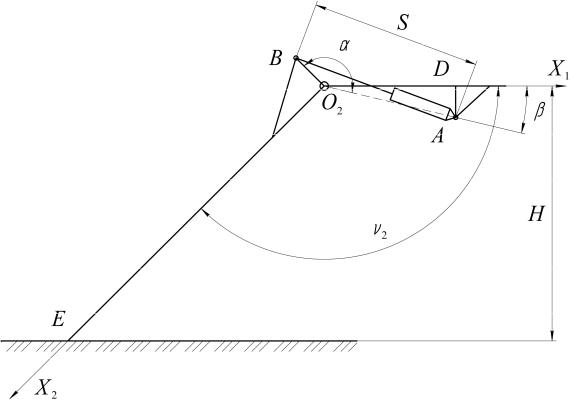
Уравнение геометрической связи перемещения штока гидроцилиндра и вертикальной координаты нижней точки рабочего органа было выведено с помощью расчетной схемы, представленной на рис. 2.6.
На расчетной схеме: ось O2X1 связана с базовой машиной; ось
O2X2 – с РО; угол ν2 – угол между базовой машиной и РО; S – ход штока гидроцилиндра РО; отрезок AD перпендикулярен к оси O2X1, а
отрезок BO2 перпендикулярен к оси O2X2.
Для составления уравнения геометрической связи введем вспомогательные углы α и β.
Из расчетной схемы
|
|
|
|
|
|
|
|
H cos |
|
|
|
|
O E; |
(2.14) |
|
|
|
||||||
|
2 |
|
2 |
2 |
|
||
2 |
3 |
. |
(2.15) |
||||
|
|||||||
|
|
|
|
|
2 |
|
|
Угол β является постоянным и зависит от конструктивных параметров узла крепления гидроцилиндра к базовой машине и РО.
Угол α зависит от конструктивных параметров узла крепления гидроцилиндра и хода штока гидроцилиндра РО. Поскольку все линейные размеры известны, то, используя теорему косинусов,
вычислим угол α из треугольника O2AB:
65
O A2 O B2 |
S2 |
|
|
|
|||
|
2 |
|
2 |
|
|
. |
(2.16) |
|
|
|
|
||||
arccos |
|
2 O A O B |
|
||||
|
|
|
|
||||
|
|
2 |
2 |
|
|
|
|
Таким образом, в уравнении (2.14) остается одна неизвестная величина – ν2.
Подставляя в уравнение (2.14) формулы (2.15) – (2.16), получим
следующее уравнение: |
|
|
|
|
|
|
|
|
|
AD |
|
O A2 O B2 |
S2 |
|
|
||
|
|
arccos |
|
2 |
2 |
|
|
O E.(2.17) |
|
|
|
|
|||||
H cos arctg |
O D |
|
|
2 O A O B |
|
|||
|
|
|
2 |
|||||
|
2 |
|
|
|
2 2 |
|
|
|
Исходя из того, что все величины в правой части уравнения, кроме величины хода штока гидроцилиндра, являются постоянными величинами, уравнение (2.17) отражает зависимость вертикальной координаты РО от величины хода штока гидроцилиндра механизма подъема и опускания РО.
Рис. 2.6. Расчетная схема механизма подъема и опускания рабочего органа
66