

2517
.pdf-при нажатии кнопки «ПУСК» происходит решение задачи оптимизации и на экран выводятся рациональные значения искомых параметров (рис. 3.44);
-при нажатии кнопки «СБРОС» все данные стираются с поля и из памяти, и программа может быть использована для следующего расчета;
-при нажатии кнопки «ВЫХОД» программа закрывается.
Таким образом, разработанная программа позволяет рассчитать
основные параметры СУ положением РО ЦТЭ на этапе
проектирования.
Рис. 3.44. Всплывающее окно с результатами расчета
Выводы по главе
177
1.Проведенные исследования ЦТЭ в статическом режиме подтвердили адекватность математической модели ЦТЭ в статическом режиме, позволили выявить основные статические характеристики и определить численные значения параметров, необходимых для проведения анализа в динамическом режиме.
2.Проведенные исследования систем управления без контура упреждения и с контуром упреждения в динамическом режиме подтвердили адекватность математических моделей систем управления, позволили получить основные зависимости, связывающие исследуемые параметры и показатели точности дна формируемой траншеи.
3.Методом гармонической линеаризации проведена линеаризация нелинейной системы управления, установлены функциональные зависимости качества переходных процессов и показателей устойчивости от исследуемых параметров для систем без контура упреждения и с ним.
4.Сформулированы задачи оптимизации для систем управления с
контуром упреждения и без него: заданы целевые функции на основании соответствия точностных характеристик, показателей качества и устойчивости систем управления критериям эффективности и путям рационализации.
5.Методом наименьших квадратов для систем управления с контуром упреждения и без него аппроксимированы функциональные зависимости, полученные при решении задачи анализа, выходных характеристик, показателей качества и устойчивости от исследуемых параметров.
6.Решена задача перехода от задачи условной оптимизации к задаче безусловной оптимизации методом множителей Лагранжа для систем управления с контуром упреждения и без него.
7.Решена задача безусловной оптимизации основных параметров методом Ньютона для систем управления с контуром упреждения и без него.
178
8.По векторному критерию эффективности для основных параметров систем управления с контуром упреждения и без него найдены оптимальные решения для различных значений подачи питающего насоса.
9.Эффективность предложенной системы управления с контуром упреждения была подтверждена путем сравнения численных значений целевых функций двух систем. Расхождение показателей эффективности составило от 6 до 50%.
10.Разработана инженерная методика выбора основных параметров системы управления с контуром упреждения и без него для различных значений подачи питающего насоса.
11.Разработан программный продукт для расчета основных
параметров системы управления в автоматизированном режиме,
который внедрен в Конструкторском бюро транспортного машиностроения г. Омска.
12. Результаты теоретических исследований могут быть распространены на различные модели ЦТЭ на пневмоколесном ходу со скребковыми РО. Использование предложенного программного продукта для решения задач анализа и синтеза систем управления различных ЦТЭ возможно при введении в базу данных основных параметров новой машины.
179
4. РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ
4.1. Экспериментальное определение жесткости упругих элементов ходового оборудования
Экспериментальные исследования проводились на экскаваторе ЭЦУ-150 на базе трактора МТЗ-82П. Одна из задач экспериментальных исследований – определение коэффициентов жесткости элементов ходового и рабочего оборудования для
уточнения параметров математической модели базовой машины.
Оси колес в статическом положении нагружались контрольными грузами массой от 70 до 150 кг, соответственно силой веса от 700 до
1500 Н, измерялось расстояние от опорной поверхности до оси
колеса, затем вычислялась величина упругой деформации колес К.
Для каждого контрольного груза измерения повторялись по 6 раз.
Средние арифметические значения величин упругих деформаций колес К представлены в табл. 4.1 и на графике (рис. 4.1).
Таблица 4.1
Экспериментальные данные упругой деформации
элементов ходового оборудования
Место |
Сила веса FК, Н |
Деформация колеса |
|
нагружения |
К, мм |
||
|
|||
|
|
|
|
Переднее колесо |
700 |
1,2 |
|
|
|
|
|
|
900 |
1,8 |
|
|
|
|
|
|
180 |
|
|
1100 |
2,2 |
|
|
|
|
1300 |
2,8 |
|
|
|
|
1500 |
3,5 |
|
|
|
|
700 |
0,5 |
|
|
|
|
900 |
0,9 |
Заднее колесо |
|
|
1100 |
1 |
|
|
|
|
|
1300 |
1,5 |
|
|
|
|
1500 |
1,8 |
|
|
|
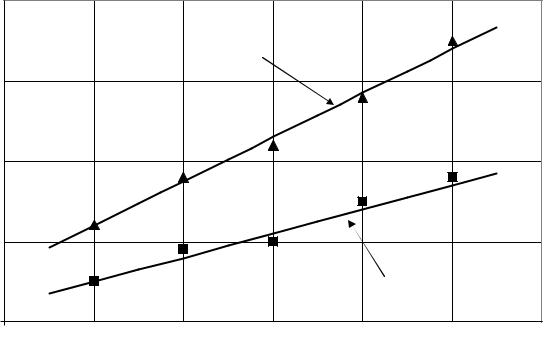
Эмпирические уравнения упругих деформаций колес ЦТЭ: |
|||||
- переднее колесо – |
К1 = 0,00275 FК – 0,7257; |
|
|
||
- заднее колесо – |
К2 = 0,0015 FК – 0,55. |
|
|
||
К, мм |
|
|
|
|
|
4 |
|
|
|
|
|
|
Переднее |
|
|
|
|
3 |
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
Заднее |
|
|
0 |
|
|
|
|
FК, Н |
700 |
900 |
1100 |
1300 |
1500 |
|
Рис. 4.1. Экспериментальные зависимости упругих деформаций колес |
|||||
от величины приложенной силы |
|
|
|||
181
Для определения коэффициента жесткости гидропривода,
приведенной к штокам гидроцилиндров, РО устанавливался в горизонтальное положение и нагружался контрольными грузами на ось крепления натяжной звездочки. Силы веса грузов FШ изменялись соответственно от 700 до 1500 Н.
Измерялась длина штоков до и после нагружения. Измерения проводились по 6 раз для каждого контрольного груза, средние арифметические значения перемещения штоков гидроцилиндров Ш представлены в табл. 4.2.
Таблица 4.2
Экспериментальные данные жесткости гидропривода,
приведенной к штокам гидроцилиндров
Сила веса FШ, Н |
Перемещение штоков Ш, мм |
|
|
700 |
0,33 |
|
|
900 |
0,42 |
|
|
1100 |
0,51 |
|
|
1300 |
0,58 |
|
|
1500 |
0,67 |
|
|
182
Ш, мм |
|
|
|
|
|
0,8 |
|
|
|
|
|
0,6 |
|
|
|
|
|
0,4 |
|
|
|
|
|
0,2 |
|
|
|
|
FШ, Н |
700 |
900 |
1100 |
1300 |
1500 |
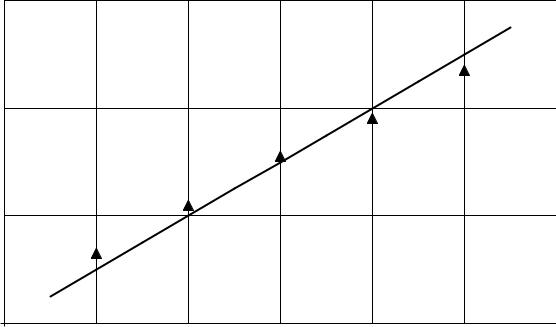
Рис. 4.2. Экспериментальная зависимость перемещения штоков гидроцилиндров
от приложенной силы к оси крепления натяжной звездочки
Экспериментальные данные позволили определить
регрессионное уравнение, устанавливающее связь перемещения
штоков гидроцилиндров Ш и силы FШ, приложенной к оси крепления
натяжной звездочки:
Ш= 0,0005 FШ – 0,05.
4.2.Экспериментальное подтверждение правомерности уравнений геометрической связи рабочего оборудования
183
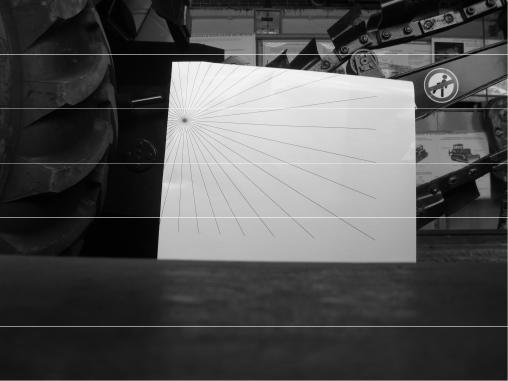
Для подтверждения правомерности выведенных уравнений геометрической связи рабочего оборудования на оси поворота РО был закреплен планшет с транспортиром и угловой разметкой (рис. 4.3).
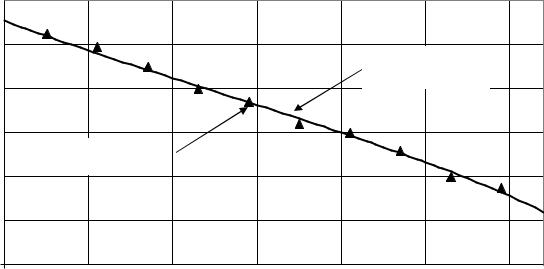
РО поворачивался (поднимался-опускался) на разный угол, при этом измерялась длина штока гидроцилиндра. В результате были получены результаты (табл. 4.3) и построена графическая зависимость (рис. 4.4).
Все измерения повторялись по 6 раз и в табл. 4.3 внесены среднеарифметические значения.
Рис. 4.3. Планшет с угловой разметкой, закрепленный на оси поворота рабочего органа
184
|
|
Таблица 4.3 |
|
Экспериментальная проверка уравнений геометрической связи |
|||
|
рабочего оборудования |
|
|
|
|
|
|
Длина штока, м |
Длина гидроцилиндра с |
Угол поворота |
|
выдвинутым штоком S, м |
рабочего органа ν2, ° |
||
|
|||
0,145 |
0,77 |
208 |
|
0,175 |
0,8 |
199 |
|
0,205 |
0,83 |
190 |
|
0,235 |
0,86 |
180 |
|
0,265 |
0,89 |
173 |
|
0,295 |
0,92 |
162 |
|
0,335 |
0,96 |
160 |
|
0,355 |
0,98 |
151 |
|
0,395 |
1,02 |
140 |
|
0,415 |
1,04 |
136 |
|
220 |
|
|
|
|
|
|
ν2,° |
|
|
|
|
|
|
200 |
|
|
|
|
Теоретическая |
|
|
|
|
|
|
|
|
180 |
|
|
|
|
зависимость |
|
160 |
Экспериментальные |
|
|
|
|
|
|
|
|
|
|
||
140 |
|
|
|
|
|
|
120 |
|
|
|
|
|
|
100 |
|
|
|
|
|
1,05S м |
0,75 |
0,8 |
0,85 |
0,9 |
0,95 |
1 |
|
Рис. 4.4. Теоретическая зависимость и экспериментальные значения угла
поворота рабочего органа от хода штока гидроцилиндра
4.3. Подтверждение адекватности математической модели
цепного траншейного экскаватора
185
Одним из этапов экспериментального исследования является подтверждение адекватности математической модели ЦТЭ.
Комплексный подход, используемый в данной работе,
предусматривает как теоретические, так и экспериментальные исследования.
В качестве объектов исследования были выбраны серийные цепные траншейные экскаваторы ЭТЦ-1616 и ЭЦУ-150, выпускаемые соответственно Заводом транспортного машиностроения (г. Омск) на базе промышленного трактора ЗТМ-82 и СООО «Дорэлектромаш»
(Респ. Беларусь) на базе промышленного трактора МТЗ-82П.
Исследования проведены в г. Омске в Конструкторском бюро транспортного машиностроения и в лабораториях СибАДИ.
В ходе проведения эксперимента, направленного на подтверждение адекватности разработанной математической модели в статическом режиме, с помощью домкрата осуществлялся поочередный подъем осей колес ЦТЭ. Затем проводились замеры характерных точек ЦТЭ по вертикальным координатам с помощью индикатора часового типа.
Проверка адекватности математической модели в динамическом режиме осуществлялась путем сравнения переходных процессов ЦТЭ,
полученных теоретическим путем, с переходными процессами,
полученными экспериментально. Адекватность проверялась по основным показателям переходного процесса: начальной амплитуде,
периоду колебаний, коэффициенту затухания колебаний.
186