

2517
.pdf2.7.3. Математическая модель порогового элемента
На вход электрогидрораспределителя могут быть поданы 3
сигнала: +iP, 0, -iP. Для формирования этих сигналов в схеме присутствует пороговый элемент.
Рис. 2.28. Статическая характеристика порогового элемента
Пороговый элемент СУ положением РО ЦТЭ (рис. 2.28) является электронным реле с регулируемой зоной нечувствительности. Так как быстродействие электронных схем на порядок выше по сравнению с другими элементами СУ положением РО ЦТЭ, пороговый элемент с динамической точки зрения можно описать как безынерционное реле.
107
108
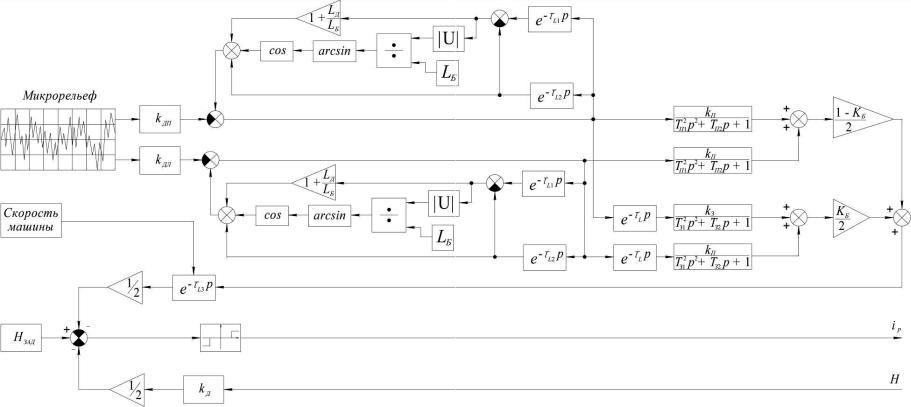
Рис. 2.29. Структурная схема СУ положением РО ЦТЭ с контуром упреждения
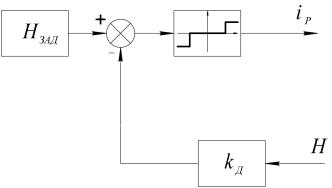
Математическое описание статической характеристики порогового элемента можно представить в виде системы неравенств:
0,5 iP sgn( 1) iP sgn( |
2) |
при |
|
0; |
||
i |
sgn( 1) iP |
sgn( |
2) |
при |
|
(2.87) |
0,5 iP |
|
0, |
||||
где ε – входная координата порогового элемента; i – выходная координата порогового элемента; ε1 – значение входного сигнала, при достижении которого на выходе порогового элемента возникает выходной сигнал; ε2 – значение входного сигнала, при достижении которого на выходе порогового элемента пропадает выходной сигнал.
Таким образом, можно представить структурные схемы СУ с контуром упреждения и без него (рис. 2.29, 2.30).
Рис. 2.30. Структурная схема СУ положением
РО ЦТЭ без контура упреждения
2.8. Обобщенная математическая модель
Обобщенную математическую модель можно представить как совокупность математических моделей отдельных подсистем.
109
Эти сложные подсистемы описаны рядом уравнений, на основе которых были составлены две обобщенные математические модели для проведения дальнейших исследований:
-без контура упреждения;
-с контуром упреждения.
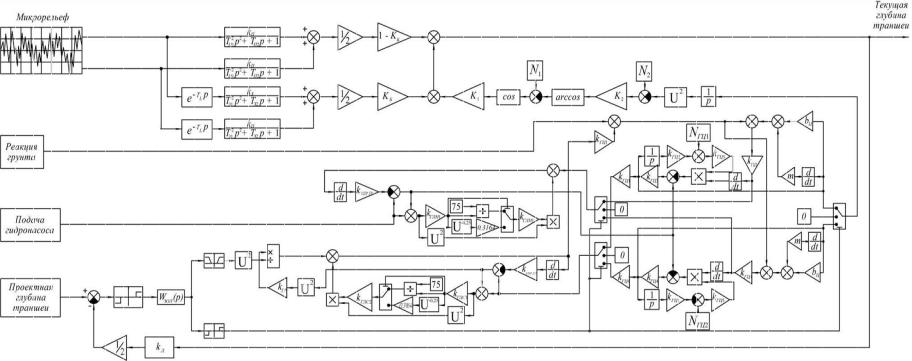
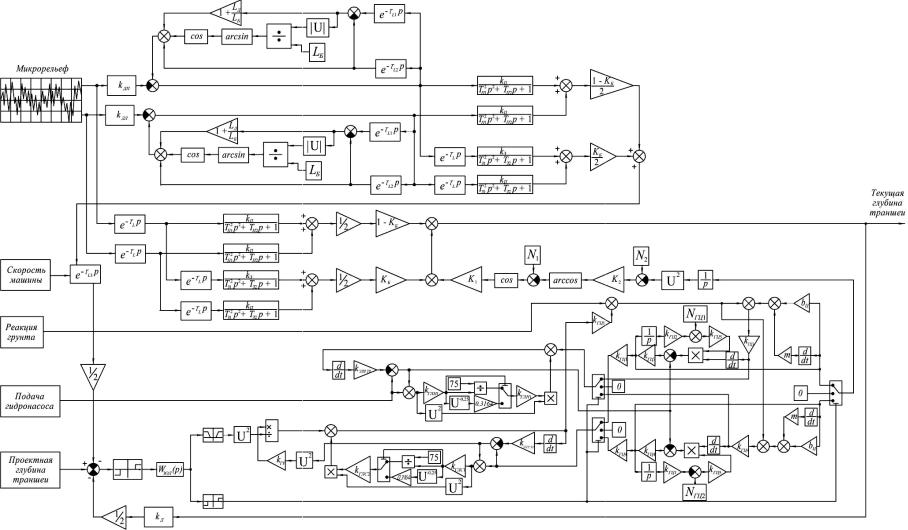
Структурные схемы обобщенных математических моделей представлены на рис. 2.31 и 2.32. Входом математических моделей являются: микрорельеф в виде функции q(x); реакция грунта; заданное значение глубины копания. Выходом математических моделей является вертикальная координата положения нижней точки РО.
110
111
Рис. 2.31. Структурная схема математической модели процесса управления положением
рабочего органа цепного траншейного экскаватора (без контура упреждения)
112
113
Рис. 2.32. Структурная схема математической модели процесса управления положением рабочего органа
цепного траншейного экскаватора (с контуром упреждения)
Выводы по главе
1. Предложенная в работе статистическая модель микрорельефа,
по которому движется ЦТЭ, позволила разработать алгоритм и программу цифровой реализации псевдослучайного профиля на ЭВМ
сиспользованием рекуррентных уравнений.
2.На основе принятых допущений и предложенной расчетной схемы разработана математическая модель процесса управления положением РО ЦТЭ, позволившая выявить функциональные зависимости его основных параметров.
3.Принятая в работе математическая модель реакции грунта на РО, включающая в себя высокочастотные и низкочастотные составляющие силы реакции грунта, адекватно описывает процесс взаимодействия скребкового РО с грунтом.
4.Математическая модель гидропривода, предложенная в работе, позволяет получать значения перемещения и скорости штока гидроцилиндра в зависимости от управляющего воздействия.
5.Задачей СУ положением РО ЦТЭ является компенсация неуправляемых перемещений РО, вызванных воздействием микрорельефа на элементы ходового оборудования и реакцией со стороны разрабатываемого грунта на РО.
6.Математическая модель СУ положением РО ЦТЭ представлена в двух вариантах: с контуром упреждения и без него.
Обе системы отражают алгоритмы преобразования информационных
параметров, динамические свойства блока управления и
гидропривода РО.
114
7.Математические модели отдельных подсистем, предложенные
вработе, позволили составить обобщенную математическую модель процесса управления положением РО ЦТЭ, которая представлена в виде структурной схемы с использованием аппарата передаточных функций и позволяет решать задачи анализа и синтеза СУ положением РО ЦТЭ.
115
3.РЕЗУЛЬТАТЫ ТЕОРЕТИЧЕСКИХ ИССЛЕДОВАНИЙ
3.1.Исследование математической модели в статическом режиме
Необходимым этапом теоретических исследований математической модели динамической системы «цепной траншейный экскаватор» является исследование ее статических характеристик. В
ходе данного исследования были решены следующие поставленные задачи:
1.Подтверждение адекватности математической модели в статическом режиме.
2.Определение начальных условий для решения задач динамики. Статические уравнения выражаются из полученных уравнений
динамики путем обнуления первых и вторых производных по времени.
При снятии статических характеристик динамической системы ЦТЭ измерялись координаты центровочного отверстия оси крепления натяжного ролика РО.
С целью проверки адекватности математической модели в
статическом режиме в качестве выходного параметра системы была
принята вертикальная координата центровочного отверстия ZРО в
инерциальной системе координат O0X0Y0Z0, связанной с грунтом.
В качестве входных параметров были приняты следующие:
1.Перемещение переднего левого колеса ZПЛ.
2.Перемещение заднего правого колеса ZЗП.
При снятии статических характеристик изменялся коэффициент
жесткости того элемента ходового оборудования, к которому
прикладывалось воздействие. Значения коэффициентов жесткости
выбирались для трех вариантов: номинальное значение С1, значение
больше номинального С2, значение меньше номинального С3.
116