

2417
.pdf8.7. Векторные диаграммы синхронного генератора
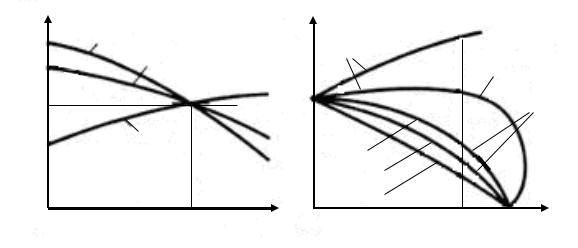
Векторные диаграммы, соответствующие выражению (8.4), приведены на рис. 8.10. На рис. 8.10, а вектор тока по отношению к вектору напряжения повернут на угол φ в сторону отставания, что соответствует активно-индуктивному характеру сопротивления нагрузки
ZН (см. рис. 8.9, а).
|
|
|
UXL1 I |
I |
|
|
UХС |
|
|
UXL1 |
|
90° |
|
U |
|||
Е |
|
|
|
|||||
|
Е |
90° |
|
|
|
Е |
UXL1 |
|
|
|
|
|
|
||||
|
|
U=UR |
|
UR |
|
|||
|
U |
UХL |
|
|
|
|
||
|
90° I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UR |
|
|
|
|
φ |
|
|
θ |
θ |
|
|
|
|
θ |
|
|
|
|
|
|
|
|||
φ |
φ=0 |
|
а |
б |
в |
|
Рис. 8.10. Векторные диаграммы фазы синхронного генератора для |
|
случаев активно-индуктивной (а), активной (б) и активно-ёмкостной (в) |
||
|
нагрузки: UR – активная составляющая напряжения нагрузки; |
|
|
UХL – индуктивная составляющая напряжения нагрузки; |
|
|
UXС – ёмкостная составляющая напряжения нагрузки |
|
На рис. 8.10, б вектор тока по направлению совпадает с вектором напряжения (φ=0), что соответствует активному характеру нагрузки.
На рис. 8.10, в вектор тока по отношению к вектору напряжения повернут на угол φ в сторону опережения, что соответствует активноёмкостному характеру нагрузки.
8.8. Внешние характеристики синхронного генератора
Зависимости напряжения U генератора от тока нагрузки I при неизменных токе возбуждения ротора Iр, частоте вращения ротора п2 и угле сдвига по фазе между током и напряжением φ называются внешними характеристиками генератора. Их можно построить с помощью векторных диаграмм (см. рис. 8.10). ЭДС Е является величиной постоянной при неизменном магнитном потоке и в соответствии с урав-
180
нением электрического состояния определяется суммой напряжения U и падения напряжения UXL1. Следовательно, как видно из векторных диаграмм, с увеличением тока нагрузки I при активной и актив- но-индуктивной нагрузках напряжение генератора уменьшается (см. рис. 8.10, а, б); при активно-ёмкостной нагрузке – увеличивается (см.
рис. 8.10, в).
U
Uном
0
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
||||
φ>0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0,6 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
φ=0 |
|
|
|
|
|
|
|
|
|
|
|
φ<0 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0,8 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ>0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ<0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
φ=0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0,8 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
а |
|
Iном |
|
I |
|
|
|
|
|
|
б |
Iном Iк |
I |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Рис. 8.11. Внешние характеристики синхронного генератора при различных видах нагрузки, полученные при одинаковом для всех характеристик номинальном напряжении Uном (а)
и одинаковом напряжении холостого хода U0=E0 (б)
На рис. 8.11, а изображены внешние характеристики генератора при различных видах нагрузки, полученные при одинаковом для всех характеристик Uном. Если устанавливать одинаковое напряжение при холостом ходе U0=E0 (рис. 8.11, б), то при номинальном токе напряжения Uном будут различными. При U=0 (короткое замыкание) все характеристики пересекаются в одной точке, соответствующей значению тока Iк.
8.9. Регулировочные характеристики синхронного генератора
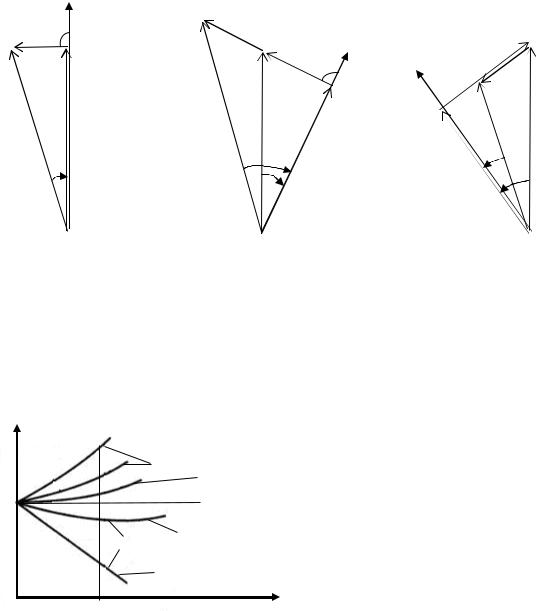
Зависимости тока возбуждения ротора Iр от тока нагрузки I при неизменных напряжении U, угле φ и частоте вращения ротора п2 называются регулировочными характеристиками. Они показывают, как надо изменять ток возбуждения генератора, чтобы поддерживать его напряжение неизменным при изменении тока нагрузки.
Величина ЭДС Е при постоянной частоте вращения ротора n2 пропорциональна току возбуждения ротора Iр. Поэтому, как видно из векторных диаграмм, представленных на рис. 8.12, с возрастанием тока нагрузки при ψ>0 ток возбуждения ротора необходимо увеличивать (см. рис. 8.12, а, б), а при ψ<0 – уменьшать (см. рис. 8.12, в).
181
90° |
I |
UXL1 |
|
|
|
UХС |
||
Е |
UХL 90° I |
|
||||||
Е UXL1 |
U=UR |
I |
|
U |
||||
U |
|
|||||||
|
|
|
|
|
UR |
90° |
UXL1 |
|
|
|
|
|
|
UR |
Е |
||
|
|
|
ψ |
|
|
ψ |
||
ψ |
φ=0 |
|
|
|
|
|||
|
|
|
|
|
φ |
|||
|
|
|
|
φ |
|
|||
|
|
|
|
|
|
|
||
а |
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.12. Векторные диаграммы синхронного генератора с неявно выраженными полюсами для активной (а), активно-индуктивной (б) и активно-емкостной (в) нагрузок: ψ – угол сдвига по фазе между ЭДС Е и током I
Регулировочные характеристики синхронного генератора приведены на рис. 8.13.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Чем больше угол ψ по аб- |
|
|
|
|
|
cosψ=0 |
|
|
|
|
|
|
|
|||||
|
Iр |
|
|
|
|
|
|
|
|
|
|
солютной величине, тем боль- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
ψ>0 |
|
|
|
|
|
|
|
ше изменение напряжения при |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
cosψ=1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
переходе от режима холостого |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
хода к режиму номинальной |
|
|
|
|
|
|
|
|
|
|
cosψ=0,8 |
|
|
|
нагрузки и тем в большей сте- |
|||
|
|
|
|
|
ψ<0 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пени требуется изменять ток |
||
|
|
|
|
|
|
|
|
cosψ=0 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
возбуждения. Чтобы подклю- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ченные к генератору потреби- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iном |
|
|
|
|
|
|
|
I |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
тели работали при напряжении, |
||||||
|
Рис. 8.13. |
Регулировочные характери- |
|||||||||||||||
|
|
близком к номинальному, при- |
|||||||||||||||
|
|
стики синхронного генератора |
|
|
|
меняются специальные быст- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
родействующие регуляторы тока возбуждения.
8.10. U-образные характеристики синхронного генератора
Ценной особенностью синхронного генератора, подключенного к электрической системе большой мощности, является возможность регулирования его реактивного тока посредством тока возбуждения, изменение которого приводит к изменению реактивной мощности: при большом токе ротора (перевозбуждении) генератор отдает в сеть
182
активную и индуктивную мощности, при недовозбуждении – активную и ёмкостную мощности.
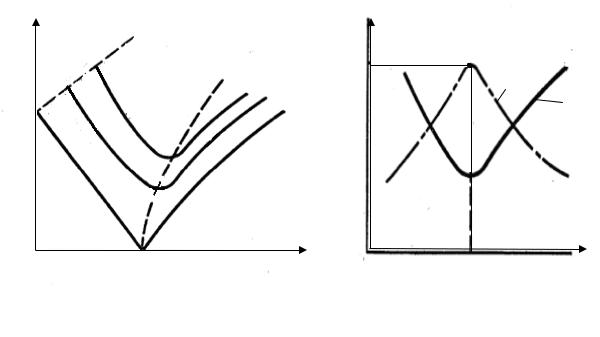
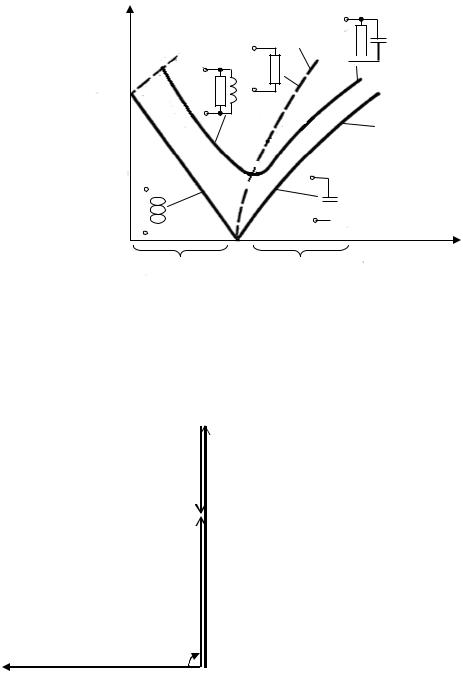
Зависимость тока статора от тока возбуждения ротора синхронного генератора при постоянных значениях активной мощности на валу или (так как Р=Мвр·ωр, где Р – активная мощность на валу; Мвр – электромагнитный момент; ωр=const – угловая скорость вращения ротора) электромагнитного момента отражают U-образные (или V-образные) характеристики (рис. 8.11, а), показывающие возможность регулирования реактивной мощности. Минимумы кривых соответствуют чисто активным токам статора (cos φ=1). В любой точке U-образной кривой:
cos φ= |
Iа |
. |
(8.6) |
|
|||
|
I |
|
|
Зависимость тока ротора для одной из U-образных кривых при
Р=const≠0 показана на рис. 8.11, б.
I
0
|
Граница |
|
|
|
|
|
|
|
|
|
|
|
||||
|
I cos φ |
|
|
|
|
|
||||||||||
|
устойчивости |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P=const |
|
|
cos φ=1 Р2> Р1 |
|
|
|
|
1,0 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
cos φ |
||||||
|
|
Р1>0 |
|
|
|
|
|
|
|
|
|
I |
||||
|
|
Р=0 |
|
|
|
|
|
|
|
|
|
|
|
|||
QС |
|
|
|
|
|
|
|
|
|
cos φ (ёмк.) |
|
|
cos φ (инд.) |
|||
|
QL |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
а |
|
Iр |
|
|
|
|
|
|
|
|
|
|
Iр |
||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
Рис. 8.11. U-образные характеристики синхронного генератора (а) и зависимости тока статора I и cos φ от тока возбуждения ротора (б)
Левее кривой cos φ=1 (см. рис. 8.11, а) ток имеет ёмкостную реактивную составляющую (QC), правее – индуктивную (QL). В левой части графика U-образные кривые не доходят до оси ординат, кроме первой кривой при Р=0. Это означает, что при малом токе возбуждения IР мала амплитуда электромагнитного момента и при увеличении активной мощности (или момента турбины) может произойти выпадение генератора из синхронизма.
183
8.11.Коэффициент мощности, векторные диаграммы
иU-образные характеристики синхронного двигателя
Важным свойством синхронной машины, работающей в трехфазной электрической системе большой мощности (U=const), является возможность регулирования ее коэффициента мощности. В синхронном двигателе это осуществляется регулированием тока возбуждения. Анализ зависимости коэффициента мощности синхронного двигателя от тока возбуждения может быть проведен на основании его уравнения электрического состояния (8.5), из которого следует:
|
|
|
|
|
|
|
(8.7) |
E |
=U |
−U XL1 . |
|||||
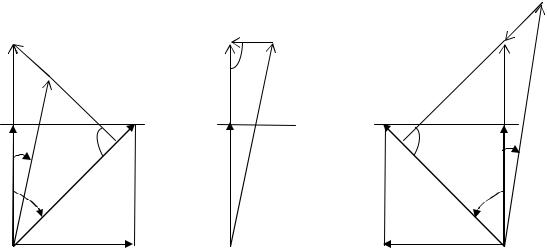
Векторные диаграммы, соответствующие выражению (8.7), приведены на рис. 8.12 для разных режимов работы при разной величине тока возбуждения.
|
|
|
|
|
|
UXL1 |
|
|
UXL1 |
|
UXL1 |
|
E |
U |
|
|
U 90° |
E |
|
|
|
|
|
U |
|||
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
I |
θ |
90° |
I |
I=Ia |
I 90° |
Ia θ |
a |
|
|
||||
|
|
φ<0 |
|
φ=0 |
|
φ>0 |
|
|
|
|
|
|
|
|
|
|
IL |
|
IC |
|
|
|
а |
|
б |
в |
|
|
|
Рис. 8.12. Векторные диаграммы фазы синхронного двигателя, |
||||
|
|
являющегося: а - активно-индуктивной нагрузкой; |
|
|||
|
|
б - активной нагрузкой; в – активно-емкостной нагрузкой |
||||
Во всех случаях вектор напряжения источника, к которому подключен синхронный двигатель, изображен направленным вверх. Величина этого напряжения во всех режимах одна и та же и равна напряжению источника. Величина ЭДС E в разных режимах разная и определяется величиной магнитного потока, т.е. током возбуждения ротора Iр. Падение напряжения на индуктивном сопротивлении обмотки статора UXL1 определяется, исходя из выражения (8.5), как векторная разность между напряжением источника U и ЭДС E:
|
|
|
|
|
|
|
(8.8) |
U |
XL1 =U − Е . |
||||||
184 |
|
|
|
|
|||
Вектор тока статора повернут на угол 90° по отношению к падению напряжения UXL1 в сторону отставания, что соответствует индуктивному сопротивлению обмотки статора.
На рис. 8.12, а величина ЭДС E меньше напряжения U. При этом ток статора отстает по фазе от напряжения (разность фаз φ<0), синхронный двигатель проявляет себя как активно-индуктивный элемент в цепи синусоидального тока с коэффициентом мощности cosφ <1.
При увеличении тока возбуждения IВ увеличивается магнитный поток и ЭДС E. При этом разность фаз φ уменьшается, коэффициент мощности увеличивается. При определенном соотношении между ЭДС E и напряжением U разность фаз становится равной нулю (рис. 8.12, б), а коэффициент мощности cosφ=1, синхронный двигатель проявляет себя как активное сопротивление.
При дальнейшем увеличении тока возбуждения соотношение между ЭДС E и напряжением U оказывается таким, что ток статора опережает по фазе напряжение (разность фаз φ>0) (рис. 8.12, в). В этом режиме синхронный двигатель проявляет себя как активноёмкостный элемент в цепи синусоидального тока.
Режим работы синхронного двигателя при разности фаз φ<0, когда ток возбуждения недостаточен, называют режимом недовозбуждения. Режим работы при разности фаз φ>0, когда ток возбуждения избыточен, называют режимом перевозбуждения. Таким образом, изменение тока возбуждения синхронного двигателя позволяет изменять его коэффициент мощности, устанавливать наиболее рациональный режим его работы с коэффициентом мощности cosφ=1.
При изменении тока возбуждения меняется не только разность фаз между напряжением и током синхронного двигателя. Меняется также величина тока статора. При этом активная составляющая тока статора определяется активной мощностью двигателя, т.е. механической мощностью на валу, и остается неизменной. Ее величина определяется проекцией вектора тока на вектор напряжения (см. рис. 8.12). Меняется только реактивная составляющая тока. В режиме нормального возбуждения (см. рис. 8.12, б) реактивная составляющая тока статора оказывается равной нулю, величина тока статора определяется только его активной составляющей и принимает наименьшее значение.
Зависимость тока статора от тока возбуждения при постоянных значениях активной мощности Р или (так как Р=Мэм·ωр, где ωр=const
– угловая скорость вращения ротора) электромагнитного момента Мэм
185
называется U-образной (или V-образной) характеристикой синхронного двигателя (рис. 8.13). Чем больше момент нагрузки на валу двигателя, тем больше активная мощность и соответственно активная составляющая тока статора и тем выше расположена U-образная характеристика.
I cos φ=1

 Р1>0
Р1>0
Р=0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
IВ |
|
|
|
|
|
|
|
|
|
|||
|
|
|
Недовоз- |
Перевоз- |
|||||||
|
|
|
|
||||||||
|
|
|
|
||||||||
|
|
|
|
|
|||||||
|
|
буждение |
буждение |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.13. U-образные характеристики
синхронного двигателя
Способность синхронного двигателя работать в режиме активноёмкостного приемника используется для компенсации реактивной мощности (повышения коэффициента
Eмощности) крупного потребителя электроэнергии, в составе которого он рабо-
UXL1 |
тает. Иногда эта функция является ос- |
|
новной для синхронного двигателя. Та- |
||
|
Uкой двигатель называется синхронным компенсатором и используется в качестве ёмкостного элемента большой мощности. В этом случае двигатель работает без нагрузки на валу. Поэтому активная
I=IC |
φ=90° |
составляющая тока ротора практически |
Рис. 8.14. Векторная |
равна нулю. Таким образом, перевозбу- |
|
жденный синхронный двигатель без на- |
||
диаграмма синхронного |
грузки на валу является синхронным |
|
компенсатора |
компенсатором (см. рис. 8.13). Вектор- |
|
|
ная диаграмма синхронного компенсатора приведена на рис. 8.14. |
|
|
186 |
8.12. Угловая характеристика синхронной машины
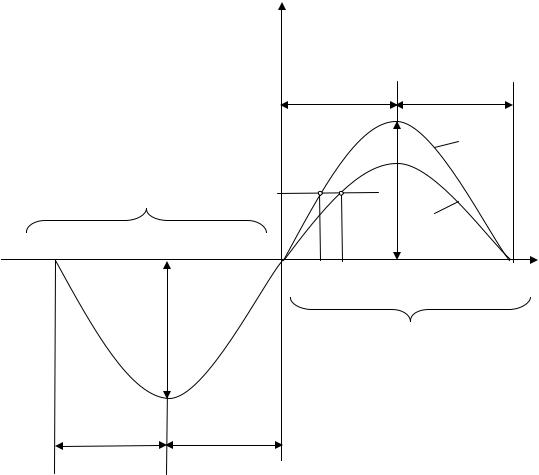
Угловой характеристикой называется зависимость мощности или (так как Р=Мэм·ωр, где Р – активная мощность на валу; Мэм – электромагнитный момент; ωр=const – угловая скорость вращения ротора) электромагнитного момента синхронной машины от угла θ рассогласования магнитных осей полюсов статора и ротора или (что то же самое) угла сдвига по фазе между ЭДС Е и напряжением U фазы стато-
ра (см. рис. 8.10, а, в, 8.12, а, в) |
|
|
|
|
М=Мm·sinθ, |
(8.9) |
|||
где |
E U |
|
|
|
Мm = 3 |
. |
(8.10) |
||
|
||||
|
X L1 ω0 |
|
||
В режиме генератора магнитная ось полюса ротора смещена на угол θ в сторону опережения; ЭДС E статора опережает по фазе напряжение U на угол θ (θ>0). В режиме двигателя магнитная ось полюса ротора смещена на угол θ в сторону отставания; ЭДС Е статора отстает по фазе от напряжения U на угол θ (θ<0). Графики угловой характеристики синхронной машины представлены на рис. 8.15.
Если θ>0, то мощность и момент положительны, машина работает в режиме генератора и отдает электрическую мощность, а электромагнитный момент при этом является тормозящим моментом, который преодолевается первичным двигателем. Вращающему моменту первичного двигателя (турбины) Мвр1 соответствует отдаваемая генератором в сеть активная мощность Р1 при угле рассогласования θ1. Как видно из графика угловой характеристики (см. рис. 8.15), уменьшение тока возбуждения ротора (Iр2), а следовательно, ЭДС Е или снижение напряжения на зажимах генератора, согласно выражению (8.10), уменьшает амплитуду электромагнитного момента, что приводит к увеличению угла рассогласования до значения θ2 и снижению устойчивости работы генератора.
При θ=90° противодействующий момент генератора достигает максимального значения (при заданных E и U). При дальнейшем увеличении вращающего момента турбины генератор не способен создать равного противодействующего момента, скорость ротора становится больше синхронной, генератор выпадает из синхронизма. Амплитудное значение электромагнитного момента Мm называется пределом статической устойчивости.
187
|
|
Р, М |
|
|
|
|
Устойчивый Неустойчивый |
||
|
|
режим |
|
режим |
|
|
|
Мm |
Iр1>Iр2 |
|
|
|
|
|
|
Режим двигателя |
Мвр1 |
|
|
|
|
|
|
Iр2 |
–180° |
–90° |
0 |
|
θ |
|
|
θ1 θ2 |
90° |
180° |
|
Мm |
Режим генератора |
||
Неустойчивый Устойчивый режим режим
Рис. 8.15. Угловая характеристика синхронной машины
На пределе статической устойчивости эксплуатация генератора недопустима. Необходим определенный запас по электромагнитному моменту. Для обеспечения динамической устойчивости синхронный генератор должен эксплуатироваться при угле рассогласования θ не более 30° при номинальной мощности. При этом перегрузочная способность по мощности составляет не менее двух. Устойчивое равновесие моментов сохраняется только на восходящем участке угловой характеристики до θ=90°.
Уменьшение вращающего момента первичного двигателя вызывает соответствующее уменьшение угла θ, и когда θ станет равным нулю, первичный двигатель будет лишь покрывать потери синхронной машины; в этих условиях машина не будет отдавать энергию в сеть как генератор и потреблять ее из сети как двигатель. Этот режим является промежуточным между режимами генератора и двигателя.
Если θ<0, то мощность и момент отрицательны (см. рис. 8.15), машина работает в режиме двигателя. Это значит, что ротор отстает
188

от результирующего поля машины, и последнее станет ведущим, а ротор – ведомым. Двигатель потребляет энергию из сети, его электромагнитный момент является вращающим, уравновешивающим механический тормозящий момент, приложенный к валу машины.
Угловая характеристика синхронного двигателя, как и синхронного генератора, определяется выражением (8.9). Амплитуда угловой характеристики характеризует перегрузочную способность синхронного двигателя или предел его статической устойчивости в синхронизме. Она зависит от напряжения сети и от тока возбуждения ротора.
При угле рассогласования θ= –90° двигатель находится на границе устойчивой работы.
При θ > −90o двигатель выпадает из синхронизма, скорость ро-
тора падает.
Перегрузочную способность двигателя легко регулировать током возбуждения. Номинальный момент соответствует углу рассогласо-
вания θ < −30o , что соответствует перегрузочной способности не
менее двух. Устойчивая работа синхронного двигателя возможна только на восходящем участке угловой характеристики.
Синхронный двигатель обладает свойством саморегулирования: при увеличении момента нагрузки увеличиваются угол рассогласования θ и, следовательно, электромагнитный вращающий момент, ко-
торый становится равным увеличенному моменту нагрузки; при уменьшении момента нагрузки соответственно уменьшаются угол θ и электромагнитный вращающий момент.
Контрольные вопросы
1. Если скорость вращения поля статора промышленного (f=50 Гц) синхронного генератора 750 об/мин, то ротор имеет:
1)одну пару полюсов;
2)две пары полюсов;
3)три пары полюсов;
4)четыре пары полюсов.
2.Генератор переменного тока имеет 32 пары полюсов и вращается с частотой 750 об/мин. Определить частоту переменного тока.
1)50 Гц; 2) 100 Гц; 3) 200 Гц; 4) 400 Гц.
189