

2366
.pdfУсилие Fp размыкания можно определить по формуле
Fp 1,15F lp  l3 .
l3 .
С другой стороны, Fp p d2  4,
4,
где p – давление жидкости в гидротолкателе; d – диаметр поршня гидротолкателя. Искомым может быть один из этих параметров.
6.4 Выбор тормоза
Тормоз выбирают по тормозному моменту Tт , который определяют по формуле
|
|
T Tмех К |
зт |
, |
|
|
|
|||
где T мех |
|
Т |
|
Т |
|
|
|
|
|
|
– тормозной момент механизма; К |
зт |
– коэффициент запаса |
||||||||
Т |
|
|
|
|
|
|
|
|
|
|
торможения (для МПГ не менее 1,5). |
|
|
|
|
|
|
||||
мех |
|
|
|
|
|
|
|
|
|
|
TТ |
|
|
входящие в это уравнение, |
|||||||
Тс Тив Тип. Слагаемые, |
||||||||||
определяют по формулам |
|
zнFбDб 0 |
|
|
|
|
||||
|
|
Тс |
; |
|
|
|
||||
|
|
|
|
|
||||||
|
|
|
|
2Up |
|
|
|
|
|
|
|
|
Tип |
9,55QV2 |
|
|
|
||||
|
|
|
г |
|
0 |
, |
|
|
||
|
|
|
n1 Т |
|
|
|
|
|||
где Т – время торможения, Т |
|
|
|
|
|
|
|
|||
п . |
|
|
|
|
|
|
||||
Момент Тив |
не изменяет своего значения. |
|
||||||||
7 Механизм передвижения
7.1 Классификация и общие сведения
Существуют механизмы передвижения (МП):
–кранов;
–крановых тележек (самоходная тележка);
–МП крановых тележек с гибкой тягой (буксируемая тележка). Известны следующие типы МП (рисунок 7.1):
91
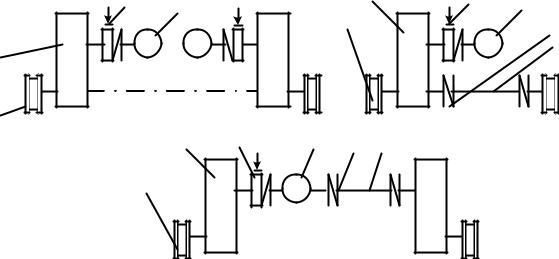
– центральный привод с тихоходным трансмиссионным валом (предпочтителен для самоходных тележек. Допустим для кранов при пролете не более 6 м);
|
3 |
4 |
|
|
2 |
3 |
|
4 |
|
|
|
|
1 |
|
|
5 |
|
|
|
|
|
|
|
|
||
|
|
М |
М |
|
|
|
М |
|
2 |
|
|
|
|
6 |
|||
|
|
|
|
|
|
|
||
1 |
|
а) |
|
|
|
|
б) |
|
|
|
|
|
|
|
|
||
|
|
2 |
3 |
4 |
5 |
6 |
|
|
|
|
1 |
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
Рисунок 7.1 – Схемы механизмов передвижения а) с раздельным приводом; б) с центральным приводом и тихоходным валом;
в) с центральным приводом и быстроходным валом.
1 – ходовое колесо; 2 0 редуктор; 3 – тормоз; 4 – электродвигатель; 5 – муфта; 6 - вал
–центральный привод с быстроходным трансмиссионным валом;
–раздельный привод. Наиболее экономичный и целесообразный вариант для всех типов кранов при пролете более 6 м.
7.2Ходовые колеса и направляющие (рельсы)
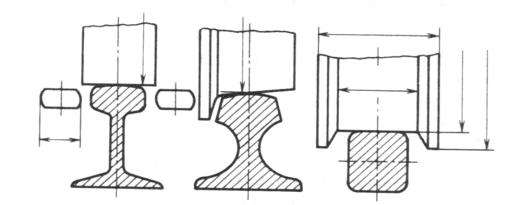
Опорными элементами кранов (тележек) служат ходовые колеса (катки). По форме поверхности катания различают колеса с цилиндрическим и коническим ободом (последние обладают свойством самоцентрирования). По наличию боковых фланцев: двухребордные (наиболее предпочтительные); одноребордные; безребордные. Последние используют в комплекте с боковыми роликами. Боковые фланцы (реборды) препятствуют сходу колес с рельсов.
Колеса изготавливают методом горячей штамповки (раскатки) из сталей с высокой стойкостью против истирания (например, сталь 65Г). Практикуют наплавку наружной поверхности обода твердыми
92
сплавами (сормайт, ВЗК). Повышает долговечность колес смазка рельсового пути. Ходовые колеса, соединенные с приводом, называют приводными; прочие – холостыми. Колеса опираются на подшипниковые узлы, называемые буксами.
B1
к |
к |
D |
D |
Bк
dp
D |
р |
D |
|
к |
|
а) |
б) |
в) |
Рисунок 7.2 – Эскизы крановых колес: а) безребордные с боковыми роликами; б) одноребордные конические;
в) двухребордные цилиндрические
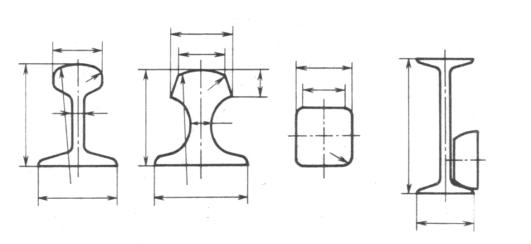
В качестве крановых и тележечных рельсов используют железнодорожные рельсы с закругленной головкой широкой колеи типов Р43, Р50; узкой колеи типов Р24 и Р38; крановые рельсы типа КР; горячекатаный квадрат с закругленными кромками.
93
b1 b b
r r
|
s |
h |
h |
R |
R |
а) б)
s
h1
b1
b
h
r
в) г)
Рисунок 7.3 – Эскизы крановых рельсов: а) железнодорожный типа Р; б) крановый типа КР; в) катаный квадрат; г) двутавр.
В качестве путей для подвесных кранов и талей используют двутавровые балки № 12…16 при грузоподъемности не более 2т и пролетах до 6 м; при большей грузоподъемности – двутавровые балки № 24М…45М.
Крановый рельсовый путь подпадает под действие Правил ПБ 10
–382 – 00 Ростехнадзора.
7.3Методика расчета механизма передвижения крана
7.3.1Анализ исходных данных (Q, Vк (VТ ), L, группа режима).
7.3.2Выбор и анализ прототипа.
7.3.3Составление расчетной схемы (на примере мостового
крана).
94
5 |
6 |
7 |
|
4 |
|
RA |
RB |
3 |
|
2 |
Q g |
mк g |
|
|
|||
1 |
mт |
g |
0,5L |
0,1L |
|
|
|
L
Рисунок 7.4 – Расчетная схема для выбора ходовых колес:
1 - подкрановая балка; 2 – рельс; 3 – ходовое колесо; 4 – концевая балка; 5 – главная балка; 6 – тележка самоходная.
Составление расчетной схемы предполагает учет внешних сил с указанием координат точек их приложения.
7.3.4 Определение опорных реакций.
Для данной схемы опора А будет наиболее нагруженной, а сила RA реакции максимальной.
Из уравнения моментов относительно точки В:
RA 0,5mкg g(Q mТ ) L 0,1L, L
где mк – масса крана. Для мостового крана mк (т) mк ≈ 0,96Q+0,85L, здесь Q(т); L(м); mТ – масса (т) тележки; mТ ≈ 0,25Q.
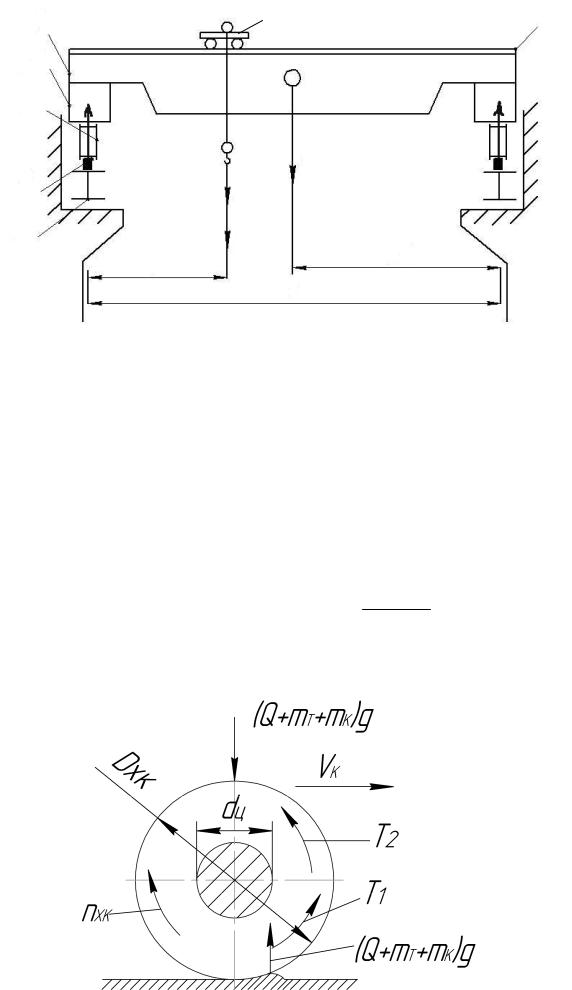
Рисунок 7.5 – Схема для определения сопротивления передвижению колеса
7.3.5 Определение силы Fхк , действующей на ходовое колесо
Fхк RA zхк ,
zхк ,
zхк – количество ходовых колес в опоре.
7.3.6 Выбор ходового колеса По комплексу
Fхк |
|
|
|
|
|
Vк (VТ ) |
|
|
Группа |
|
Из справочника выбирают типоразмер |
|
||
|
|
ходового колеса с диаметром обода Dхк |
режима |
|
|
7.3.7 Теория ходового колеса Движению ходового колеса будут препятствовать суммарный
момент Т сопротивления (рисунок 7.5)
Т Т1 Т2 ,
где Т1 – момент сопротивления от сил трения в опоре ходового колеса; Т2 – момент сопротивления на поверхности катания (ободе ходового колеса).
Моменты Т1 и Т2 определяют по формулам (7.1) и (7.2) соответственно:
Т |
|
g Q m |
m |
f |
dц |
; |
(7.1) |
|
|
||||||
|
1 |
к |
Т |
2 |
|
|
|
Т2 g Q mк mТ , |
(7.2) |
||||||
|
|
96 |
|
|
|
|
|

где f – коэффициент трения (для шарикоподшипника f =0,015; для роликового – 0,02); dц – диаметр цапфы (dц 0,2Dхк ); – плечо реактивной силы ( 0,0004 м).
После преобразований формул (7.1) и (7.2) получено выражение для определения силы FТ (сопротивление от сил трения - формула
7.3).
7.3.8 Определение сил сопротивления
Двигатель механизма передвижения должен преодолеть суммарную силу F
F FТ Fу Fв ,
где FТ – см. выше; Fу – сила сопротивления от уклона пути; Fв –
сила сопротивления от ветровой нагрузки.
F |
к |
(m |
Q)g |
fdц 2 |
; |
(7.3) |
|
||||||
Т |
р |
к |
|
Dхк |
|
|
|
|
|
|
|
||
Fу |
g(mк |
Q)sin ; |
|
|||
Fв p( Aк Aг ),
где кр – коэффициент трения реборды (кр =1,1…2,5 – возрастает с
увеличением L); mк – масса крана, включая массу тележки; – уклон пути (ввиду малой разницы между значениями и sin принимают численное значение = 0,001…0,005 в зависимости от типа крана); р – давление ветра ( р = 150…250 Па); Ак , Аг – площадь крана, груза соответственно (м2).
Площадь крана с решетчатой металлоконструкцией Акр ≈ 0,2Q; с
коробчатой Акк ≈ 0,5Q (здесь Q, т). Площадью тележки можно пренебречь.
Площадь Аг груза принимают по справочнику /5/ в зависимости от Q (т). Для некоторых типов кранов (мостовые, консольные и др.) ветровая нагрузка может отсутствовать.
7.3.9 Определение мощности и выбор электродвигателя Условие выбора Р1 Рс ,
97

где Р1 – мощность двигателя, кВт; Рс – статическая (расчетная) мощность двигателя.
Рс F Vк ,
103 0zд
где Vк – скорость крана (VТ – скорость самоходной тележки), м/с; 0
– общий КПД механизма ( 0 = 0,85); zд – количество двигателей.
7.3.10 Проверка двигателя МП по сцепной мощности
P |
zпр |
z mкg Vк |
0,5P, |
|
|
|
|||
с |
103 |
1 |
||
|
|
0 |
|
|
где – коэффициент сцепления ходовых |
колес с рельсами: при |
|||
работе в помещении = 0,2; при работе на открытых площадках = 0,12; zпр – количество приводных колес; z – общее количество
ходовых колес в кране. Двигатель выбирают по большей из этих мощностей.
7.3.11 Проверка двигателя по пусковому моменту Условие проверки Tпускд Tпускмех ,
где Тпускд – пусковой момент двигателя, Нм (с учетом zд ); Тпускмех – пусковой момент механизма, Нм.
Тпускмех Тс Тив Тип ,
где Тс – статический момент, Нм; Тив – инерционный момент вращающихся масс (условно приведен к валу электродвигателя), Нм; Тип – инерционный момент от поступательного движущихся масс, Нм.
Указанные моменты определяют по формулам
Тс F оDхк ;
2Uр 0
Тив 1,2 I1n1 ;
9,55 п
Тип 9,55 mк Q Vк2 , n1 п 0
98
где Uо |
– ориентировочное передаточное число редуктора; |
п |
– время |
p |
|
|
|
пуска, |
с. п Vк a (здесь a – допускаемое ускорение; в среднем |
||
a = 0,05 м/с2);
Uр n1 nxк ,
nxк ,
где nхк – частота вращения ходового колеса, мин-1:
nхк 60Vк .Dхк
В некоторых случаях возникает необходимость установки между редуктором и ходовым колесом дополнительной зубчатой пары. Тогда,
Uмех Uр Uзп ,
где Uзп – передаточное число зубчатой пары (рисунок 7.6).
3 |
1 |
2
Рисунок 7.6 – Схема к расчету: 1-редуктор; 2 - зубчатая пара; 3 - приводное колесо
99
7.3.12 Проверка двигателя по коэффициенту запаса сцепления
Должно соблюдаться условие
k 1,2
где k – коэффициент запаса сцепления при работе крана без груза.
При соблюдении этого условия исключено буксование ходовых колес.
k |
|
|
|
Fпр |
|
|
|
, |
||
|
|
|
a |
zпр |
|
dц |
|
|||
|
F |
|
|
|
||||||
|
m g |
|
|
|
f |
|
|
|||
|
|
|
||||||||
|
|
к |
|
g |
z |
|
|
|
||
|
|
|
|
|
Dхк |
|||||
где Fпр – сила, действующая на приводные ходовые колеса; F –
суммарная сила сопротивления передвижению крана при Q = 0.
F FТ Fу Fв ,
где FТ gmк |
fd 2 |
; |
||
|
Dхк |
|
||
Fу gmк ; |
Fв p Aк. |
|||
При несоблюдении условия k 1,2 необходимо увеличить количество приводных ходовых колес.
7.3.13 Выбор редуктора
Редуктор выбирают по мощности Рр (или крутящему моменту Тб
на тихоходном валу редуктора) с учетом условий работы и
передаточному числу Uо |
редуктора. |
|
|
p |
|
|
|
Расчетную мощность Рр |
редуктора на |
быстроходном валу |
|
определяют по формуле |
Рр |
Р1 К, |
|
|
|
||
где Р1 – мощность электродвигателя, кВт; |
К – коэффициент, |
||
учитывающий условия |
работы |
редуктора, |
К 1,2. Используют |
редукторы типа ВК – вертикальный крановый. |
|
||
100