

2330
.pdfISSN 2071-7296
Министерство образования и науки Российской Федерации Сибирская государственная автомобильно-дорожная академия (СибАДИ)
ВЕСТНИК СибАДИ
Выпуск 4 (22)
Омск
2011
Вестник СибАДИ: Научный рецензируемый журнал.–Омск: СибАДИ. - № 4 (22). - 2011. - 100 с.
Учредитель – ФГБОУ ВПО Сибирская государственная автомобильно-дорожная академия (СибАДИ)
Свидетельство о регистрации ПИ № ФС77-46612 от 16 сентября 2011 г. выдано Федеральной службой по надзору в сфере массовых коммуникаций, связи и охраны культурного наследия.
Научный рецензируемый журнал «Вестник СибАДИ» входит в перечень ведущих периодических изданий рекомендованных ВАК решением президиума ВАК от 25.02.2011 Входит в международный каталог Ulrich’s International Periodicals Directory.
Редакционная коллегия:
Главный редактор – Кирничный В. Ю. д-р экон. наук, доц. ФГБОУ ВПО "СибАДИ"; Зам. главного редактора – Бирюков В. В. д-р экон. наук, проф. ФГБОУ ВПО "СибАДИ"; Зам. главного редактора – Завьялов А. М. д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ";
Исполнительный редактор – Архипенко М. Ю. канд. техн. наук, доц. ФГБОУ ВПО "СибАДИ";
Выпускающий редактор – Новикова Е. В.
Члены редакционной коллегии:
Витвицкий Е.Е Волков В. Я. ГалдинН. С. Епифанцев Б. Н. Жигадло А. П. Кадисов Г.М. Матвеев С. А. Мещеряков В. А. Мочалин С.М. Певнев Н. Г. Плосконосова В. П. Пономаренко Ю.Е. ПрокопецВ.С. СиротюкВ. В. Смирнов А.В. Щербаков В. С.
Editorial board
Kirnichny V.
Birukov V.
Zavyalov A.
Arkhipenko M.
Novikova E.
Members of editorial board
Vitvitsky E.
Volkov V.
Galdin N. Epifantzev B. Jigadlo A. Kadisov G. Matveev S. Mescheryakov V. Mochalin S. Pevnev N. Ploskonosova V. Ponomarenko Yu. Prokopets V. Sirotyk V. Smirnov A. Scherbakov V.
д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р пед. наук, доц. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р филос. наук, проф. ФГБОУ ВПО "СибАДИ". д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ"; д-р техн. наук, проф. ФГБОУ ВПО "СибАДИ";
Doctor of Economical Science, Professor SibADI, Editor-in-chief Doctor of Economical Science, Professor SibADI, Deputy editor-in-chief Doctor of Technical Science, Professor SibADI, Deputy editor-in-chief Candidate of Technical Science, SibADI, Executive Editor
Publishing Editor
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Pedagogical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Philosophy, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Doctor of Technical Science, Professor SibADI
Адрес редакции: 644080. Россия, г. Омск, пр. Мира, 5, комн. 3232. E-mail: Vestnik_Sibadi@sibadi.org , http://www.sibadi.org
Издательство ФГБОУ ВПО Сибирская государственная автомобильно-дорожная академия (СибАДИ)
Подписной индекс 66000 в каталоге агентства РОСПЕЧАТЬ |
|
Издается с 2004 г. |
© Сибирская государственная |
С 01.01.2008 – издается ежеквартально |
автомобильно-дорожная |
|
академия (СибАДИ), 2011 |

СОДЕРЖАНИЕ
РАЗДЕЛ I
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
Демиденко А.И., Семкин Д.С. |
5 |
Математическая модель взаимодействия цепного рабочего органа с грунтом |
|
Сыркин В.В., Трейер В.А. |
8 |
Математические модели оптимизации массовой и объемной характеристик элементов привода |
|
системы управления аэростатического летательного аппарата |
|
РАЗДЕЛ II |
|
СТРОИТЕЛЬСТВО. СТРОИТЕЛЬНЫЕ МАТЕРИАЛЫ И ИЗДЕЛИЯ |
|
Боброва Т.В., Бедрин Е.А., Дубенков А.А. |
11 |
Прогнозирование эффективности дорожных конструкций на многолетнемерзлых грунтах |
|
Ефимов П. П. |
16 |
Учёт влияния длительно действующих процессов деформирования бетона на напряжённое |
|
состояние балочных разрезных сталежелезобетонных пролётных строений мостов |
|
Кадисов Г.М., Чернышев В.В. |
19 |
Динамика вантового моста после обрыва ванты |
|
Левашов Г.М., Сиротюк В.В. |
23 |
Об определении предела прочности асфальтобетона на растяжение при изгибе |
|
Матвеев С.А., Мартынов Е.А. |
26 |
Расчет конструкций мостовых пролетных строений коробчатого сечения на изгиб с кручением |
|
Михайловский В.П., Прокопец В.С. |
30 |
Высолообразование в конструкциях строительных объектов |
|
Смирнов А.В. |
36 |
Динамические волновые поля при воздействии подвижных нагрузок на поверхности автомагистралей |
|
В.А. Уткин |
39 |
Регулирование положения нейтральной оси при проектировании сечений сталежелезобетонных |
|
пролетных строений |
|
РАЗДЕЛ III |
|
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ. СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ |
|
Ахтулов А.Л., Ахтулова Л.Н. |
43 |
Задачи геометрического моделирования в создании систем автоматизации конструирования |
|
обводообразующих поверхностей сложных объектов |
|
Глухов В.И., Захарюта Т.С., Клинникова Ю.Е. |
48 |
Адекватные геометрические модели реальных деталей и сопряжений |
|
Ильясова О.Б., Волков В.Я., Завьялов А.М. |
50 |
Конструирование линейчатых многообразий трехмерного пространства с образующей прямой линией |
|
Тарасов В.Н., Бояркина И.В. |
53 |
Основные теоремы площадей квадратов и треугольника |
|
РАЗДЕЛ IV |
|
ЭКОНОМИКА И УПРАВЛЕНИЕ |
|
Исправников В.О. |
54 |
Экологическая модернизация экономики и развитие предпринимательства |
|
Кирничный В.Ю. |
58 |
Приоритеты и механизм модернизации автомобильно-дорожного комплекса |
|
Андрианова Л.И. |
62 |
Использование инновационного потенциала малых научно-технических предприятий в строительном |
|
комплексе на основе аутсорсинга |
|
Бирюков В.В. |
64 |
Инновации и формирование конкурентных преимуществ автотранспортного предприятия. |
|
Зорюкова Н.И. |
68 |
Роль предпринимательских бизнес-единиц и властных структур в строительном комплексе |
71 |
Иванов В.Н., Салихова Г.К. |
|
Организация комплекса пунктов обмена аккумуляторных батарей как перспективное направление |
|
предпринимательской деятельности |
|
Карпов В.В. |
75 |
Моделирование финансово-экономических показателей деятельности предпринимательских |
|
структур |
|
Плосконосова В.П. |
78 |
Человеческий капитал и активизация предпринимательства в инновационной экономике |
|
Романенко Е.В., Коротаев Д.Н. |
81 |
Институционально-пространственные изменения экономики и особенности развития малого |
|
предпринимательства |
|
Хаирова С.М. |
85 |
Использование концепций логистики и инновационного подхода в управлении при формировании |
|
региональной транспортно-логистической системы |
|
Чувикова В. В. |
89 |
Применение оценки результативности прямой цепи поставок в товародвижении |
|
Эйхлер Л.В. |
93 |
Формирование конкурентных преимуществ грузовых автотранспортных предприятий при реализации |
|
политики экономической интеграции |
|
Вестник СибАДИ, выпуск 4 (22) 2011 |
3 |

CONTENTS
PART I
TRANSPORTATION. TRANSPORT TECHNOLOGICAL MACHINERY
Demidenko A.I., Semkin D.S. |
5 |
Mathematical model of interaction of chain working body with a ground |
|
Syrkin V.V., Treier V.A. |
8 |
Optimization of mass and volume characteristics of the discharge pipe of a hydraulic system control aerostatic |
|
aircraft (blimp) |
|
PART II |
|
ENGINEERING. BUILDING MATERIALS AND STRUCTURES |
|
Bobrova T.V., Bedrin E.A., Dubenkov A.A. |
11 |
Predicting the effectiveness of road construction on permafrost soils |
|
Efimov P.P. |
16 |
Allowance of the effect of long-acting defamation processes of concrete on the state of stress in composite |
|
simple beams of bridge spans |
|
Kadisov G.M., Chernyshov V.V. |
19 |
Dynamics cable-stayed bridge after breakage stay cable |
|
Levashov G.M., Sirotuk V.V. |
23 |
About definition ultimate tensile strength bending a beam of asphalt concrete |
|
Matveev S.A., Martynov E.A. |
26 |
The calculation of bridge structures with box-shaped cross section at a bend with torsion |
|
Mihaylovskiy V.P., Prokopetch V.S. |
30 |
Efflorescence of buildings |
|
Smirnov A.V. |
36 |
Dynamic effects of wave field in moving loads on the surface of arteries |
|
Utkin V.A. |
39 |
The regulation of the neutral axis position when designing sections of steel reinforced concrete span structures |
|
PART III |
|
MATHEMATICIAL MODELING. SYSTEMS OF AUTOMATION DESIGNING |
|
Ahtulov A.L., Ahtulova L.N. |
43 |
Problems of geometrical modeling in creation of systems of automation of designing contour forming surfaces of |
|
complex |
|
Glukhov W.I., Zakharyuta T.S., Klinnikova Yu.E. |
48 |
Adequate geometric models of real details and couplings |
|
Ilyasova O.B., Volkov V.Y., Zavialov A.M. |
50 |
Construction of ruled manifolds in three-dimensional space with forming a straight line |
|
Tarasov V.N., Boyarkina I.V. |
52 |
Main area theorems squares and triangles |
|
PART IV |
|
ECONOMICS AND MANAGEMENT |
|
Ispravnikov V.O. |
54 |
Ecological modernization of economy and business development |
|
Kirnichny V.Y. |
58 |
Priorities and mechanism of modernization of automobile and highway complex |
|
Andrianova L. |
62 |
The use of innovative potential of the small scientific and technical enterprises in the construction industry on the |
|
basis of outsourcing |
|
Birykov V.V. |
64 |
Innovations and formation of competitive advantages of the motor transportation enterprise |
|
Zoryukova N.I. |
68 |
The mechanism of the public-private cooperation in the construction sector |
|
Ivanov V.N., Salikhova G.K. |
71 |
The organization of the complex of places of the accumulator batteries’ exchange as a perspective direction of |
|
business |
|
Karpov V.V. |
75 |
The modeling of the financial and economic indicators of business structures |
|
Ploskonosova V.P. |
78 |
Human capital and activity of intrepreneurship in innovation economic |
|
Romanenko Е.V., Korotaev D.N. |
81 |
The institutional and spatial changes of economy and features of the small business development |
|
Khairova S. M. |
85 |
The usage of logistics’ idea and innovative approach in management during the formation of regional transport- |
|
logistic system |
|
Chuvikova V.V. |
89 |
Application of the estimation of productivity of the direct chain of deliveries in the commodity movement |
|
Eihler L.V. |
93 |
Forming competitive advantages motor freight companies in the implementation of policy of economic |
|
integration |
|
Вестник СибАДИ, выпуск 4 (22) 2011 |
4 |

ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
РАЗДЕЛ I
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
УДК 621.879
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВЗАИМОДЕЙСТВИЯ ЦЕПНОГО РАБОЧЕГО ОРГАНА С ГРУНТОМ
А.И. Демиденко, Д.С. Семкин
Аннотация. Рассматривается вопрос взаимодействия цепного рабочего органа с разрабатываемой средой. Приводятся уравнения для нахождения составляющих силы сопротивления резанию и копанию грунта резцами, а также уравнение суммарной силы сопротивления копанию грунта рабочим органом траншейного экскаватора.
Ключевые слова: экскаватор, грунт, траншея, взаимодействие, математическая модель.
Введение
Машины для земляных работ эксплуатируются в грунтах, обладающих различными свойствами, которые влияют на производительность и эффективность их работы.
Изменение положения рабочего органа при работе по продольной, поперечной схеме копания, а также при производстве работ по подкапыванию трубопроводов с помощью цепного рабочего органа также оказывает влияние на процесс разработки грунта [1, 2].
Данные факторы необходимо учитывать при определении рациональных параметров и режимов работы траншейных экскаваторов.
Основная часть
Современные экскаваторы непрерывного действия оснащаются рабочими органами с несколькими линиями резания, в которых установлены резцы различной формы (Рисунок 1).
Рис. 1. Линии резания
В общем случае суммарная сила сопротивления копанию рабочим органом
m |
|
Ркоп = ∑ (Рi ∙ ni) + Р∑ РО с ГР , |
(1) |
i = 1 |
|
где Рi – сила сопротивления копанию резцом i – ой формы, Н;
ni – количество резцов i – ой формы, одновременно взаимодействующих с грунтом, шт;
m – количество линий резания, шт;
Р∑ РО с ГР – суммарная сила сопротивления перемещению резцов с грунтом, Н.
Толщина стружки определяется шагом расстановки резцов, а так же соотношением скорости рабочего хода экскаватора и скорости движения цепи. Толщина срезаемой стружки грунта
h = |
|
|
υр.х ∙ sin φ |
∙ (z + 1) ∙ t, (2) |
|
|
|
|
|
||
2 |
2 |
|
|||
|
|
υ |
ц + υ р.х + 2 ∙ υц ∙ υр.х ∙ cos φ |
|
|
где υр.х – скорость рабочего хода, м/с; υц – скорость движения цепи, м/с; φ – угол груди забоя, град;
(z + 1) ∙ t – шаг однотипных резцов, м.
Общее уравнение для определения силы сопротивления копанию одним резцом можно представить следующим образом [3, 4]
Рi = Рiрез + РiГР по РО + РiИН ГР , |
(3) |
где Рiрез – сила сопротивления грунта резанию одним резцом, Н;
– сила сопротивления перемещению грунта по резцу, Н;
– сила сопротивления изменению скорости движения разработанного грунта, Н.
В общем случае сила резания грунта расходуется на отделение стружки от массива режущей кромкой (подобно проволочному ножу), на изгиб срезанной стружки и сдвиг грунта по боковым поверхностям.
Таким образом, общее уравнение для определения силы резания можно представить следующим образом [3, 5]
Ррез = (Рсж + Ризн + Ризг + Рсдв) ∙ Кдин , (4)
где Рсж – сила сопротивления грунта сжатию режущей кромкой, Н; Ризн – сила трения грунта по поверхности износа режущей кромки, Н;
Вестник СибАДИ, выпуск 4 (22), 2011 |
5 |
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
Ризг – сила сопротивления срезаемой стружки изгибу, Н;
Рсдв – сила сопротивления грунта сдвигу по боковым поверхностям, Н;
Кдин – коэффициент динамичности резания.
В процессе резания происходит смятие грунта поверхностями затупления режущей кромки. Для упрощения расчетов допустим, что затупление кромки происходит по дуге, аппроксимированной двумя линейными функциями (Рисунок 2).
Рис. 2. Смятие грунта режущей кромкой
Тогда сила сопротивления грунта сжатию режущей кромкой
Рсж = σсж ∙ |
δ |
∙ L ∙ (sin α0 |
+ |
|
sin α0 |
|
|||
+ cos α0 ∙ μ) ∙ cos γ , |
(5) |
|||
где σсж – предельное напряжение сжатия грунта, Па; δ – толщина затупления кромки, м;
α0 – угол наклона грани к траектории движения резца, град.
L – длина режущей кромки, м.
μ – коэффициент трения грунта по стали.
γ – угол установки режущей кромки в плане, град. Для более точного расчета можно произвести
линеаризацию истинной формы затупления кромки несколькими отрезками.
В процессе резания возникает трение грунта по поверхности износа режущей кромки. Допустим, что давление на площадку износа будет равным напряжению смятия грунта. Тогда сила трения
грунта по поверхности износа режущей кромки |
(6) |
Ризн = σсж ∙ δизн ∙ L ∙ μ , |
где δизн – ширина поверхности износа, м. После срезания стружки с массива грунта ре-
жущей кромкой она продвигается вверх по ножу, при этом происходит изгиб стружки (Рисунок 3).
Рис. 3. Изгиб стружки грунта
Момент силы сопротивления изгибу стружки грунта
Мсопр изг = W ∙ σизг , |
(7) |
где W – момент сопротивления поперечного сечения стружки, м3; σизг – предельное напряжение грунта при изгибе, Па.
Изгиб стружки происходит аналогично изгибу консольной балки. Тогда изгибающий момент от действия силы сжатия грунта
Мизг = |
σсж ∙ L ∙ L2сж |
, |
(8) |
|
2 |
||||
|
|
|
где Lсж – длина площадки, на которой происходит сжатие грунта, м.
Минимальное условие, при котором произойдет изгиб стружки грунта
Мсопр изг = Мизг ; |
(9) |
Исходя из этого условия длина площадки сжатия грунта, достаточная для изгиба срезаемой стружки
Lсж = |
2 ∙ W ∙ σизг |
. |
(10) |
L ∙ σсж |
Таким образом, сила сопротивления срезаемой стружки изгибу
Ризг = 2 ∙ W ∙ L ∙ σсж ∙ σизг ∙ (sin α + |
(11) |
+ cos α ∙ μ) ∙ cos γ , |
где α – угол резания, град.
Для практических расчетов можно допустить, что прочность грунта на изгиб равна его прочности на растяжение [6].
При отсутствии на рабочем органе боковых подрезающих профилей, в процессе резания происходит сдвиг грунта по боковой поверхности. С некоторым приближением можно допустить, что сдвиг по боковой поверхности стружки грунта происходит по площади ее изгиба (Рисунок 4).
Рис. 4. Площадь сдвига грунта
Исходя из этого, площадь сдвига грунта по боковой поверхности
S = h ∙ Lсж , |
(12) |
где h – толщина срезаемой стружки возле боковой поверхности, м.
Таким образом, сила сопротивления грунта сдвигу по боковым поверхностям с учетом действия бокового давления грунта
6 |
Вестник СибАДИ, выпуск 4 (22), 2011 |
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
Рсдв = h ∙ |
2 ∙ W ∙ σизг ∙ (σсж ∙ ξ ∙ μ2 + σр) ∙ |
|
L ∙ σсж |
|
(sin α + cos α ∙ μ) ∙ nбл . |
где Lзаб – длина груди забоя, м;
(13)mгр – масса транспортируемого грунта в конце пути копания, кг;
где ξ – коэффициент бокового давления; μ2 – коэффициент трения грунта по грунту;
σр – предельное напряжение растяжения грунта, Па.
На силу сопротивления копанию грунта влияет скорость резания [5]. Расчетный коэффициент динамичности резания
Кдин = 1 + |
υ2р |
, |
(14) |
|
υ |
2 |
|||
|
д |
|
|
|
где υр – скорость резания грунта, м/с; υд – скорость распространения общей упругопластической деформации грунта, м/с.
При производстве работ по подкапыванию трубопроводов с помощью цепного рабочего органа изменяется положение скребков относительно направления действия силы тяжести. Однако экскаваторы непрерывного действия срезают стружку малой толщины и силы сопротивления грунта при ее отделении возникают в небольшом объеме. Поэтому можно допустить, что влияние силы тяжести на силу сопротивления грунта резанию незначительно.
Таким образом,
δ
Ррез = [σсж ∙ sin α0
+ σсж ∙ δизн ∙ L ∙ μ + (
 2 ∙ W ∙ L ∙ σсж ∙ σизг ∙ cos γ +
2 ∙ W ∙ L ∙ σсж ∙ σизг ∙ cos γ +
+ h ∙ |
2 ∙ W ∙ σизг ∙ (σсж ∙ ξ ∙ μ2 + σр) ∙ nбл) ∙ |
|
L ∙ σсж |
2
(sin α + cos α ∙ μ) ] ∙ 1 + υ2р . (15) υ д
Аналогичным образом, можно определить нормальную составляющую силы сопротивления грунта резанию.
При работе цепного рабочего органа по схеме подкапывания трубопровода действие силы тяжести приводит к обрушению отделенной от массива грунта стружки на боковые поверхности скребка. Поэтому сила тяжести не препятствует продвижению стружки вдоль режущего элемента и не вызывает значительного трения грунта по поверхности скребка (Рисунок 5).
Исходя из этого, силу сопротивления перемещению грунта по поверхности скребка в данном случае практически можно не учитывать.
При транспортировании разработанного грунта в процессе копания, происходит изменение скорости его движения. С некоторым приближением можно допустить, что работа, совершаемая при изменении скорости разработанного грунта одним резцом равна энергии, которой обладает транспортируемый грунт в конце пути копания.
А = Е ; |
|
(16) |
||
|
|
|
||
РИН ГР ∙ Lзаб = |
mгр ∙ υр2 |
, |
(17) |
|
2 |
||||
|
|
|
||
Рис. 5. Обрушение срезаемой стружки
Исходя из этого условия, сила сопротивления изменению скорости движения разработанного грунта
РИН ГР = |
mгр ∙ υр2 |
(18) |
. |
||
|
2 ∙ Lзаб |
|
Так как у экскаваторов непрерывного действия рабочие органы уравновешены, то сила сопротивления перемещению рабочего органа с грунтом будет возникать только в результате подъема грунта. Однако при производстве работ по подкапыванию трубопроводов цепной рабочий орган располагается горизонтально и подъема грунта не происходит.
Рассмотрим рабочий орган с равномерным распределением резцов разных форм по рабочему органу. Тогда количество резцов i – ой формы одновременно взаимодействующих с грунтом
ni = |
Н |
|
. |
(19) |
|
t ∙ m ∙ sin φ |
|||||
|
|
|
|||
где Н – глубина отрываемой траншеи, м; t – шаг расстановки резцов, м;
Таким образом, суммарная сила сопротивления копанию грунта при производстве работ по подкапыванию трубопроводов
m |
{(Рiрез + Si ∙ ρ ∙ |
υр |
2 |
Н |
|
} , (20) |
|
Ркоп = ∑ |
) ∙ |
|
|||||
t ∙ m ∙ sin φ |
|||||||
i = 1 |
|
2 |
|
|
|||
|
|
|
|
|
|
||
где Рiрез – сила сопротивления грунта резанию скребком i – ой формы, Н.
Si – площадь срезаемой стружки скребком i – ой формы, м2;
ρ – плотность грунта, кг/м3.
При работе цепного рабочего органа по продольной схеме копания возникает сила сопротивления перемещению режущего элемента в результате продвижения стружки грунта по его поверхности.
РГР по РО = Si ∙ ρ ∙ g ∙ |
(21) |
|
[Lн ∙ (sin (φ – α) + cos (φ – α) ∙ μ) ∙ cos α + |
||
|
||
+ Lр ∙ (sin (φ – β) + cos (φ – β) ∙ μ) ∙ cos β] , |
|
|
где Lн – длина ножевой системы, м; |
|
|
Lр – длина поверхности резца, м. |
|
|
g – ускорение свободного падения, м/с2. |
|
Вестник СибАДИ, выпуск 4 (22), 2011 |
7 |
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
β – угол наклона поверхности резца к горизонту, град.
Суммарная сила сопротивления перемещению резцов с грунтом при продольном копании, возникающая в результате подъема грунта из забоя
m |
Н ∙ (Н + t ∙ sin φ) |
|
(22) |
||
Р∑ РО с ГР = ∑ Si ∙ |
∙ ρ ∙ g ∙ sin φ |
||||
2 |
φ |
||||
i = 1 |
2 ∙ m ∙ sin |
|
|
||
|
|
|
|
||
Таким образом, суммарная сила сопротивления копанию грунта при продольном копании
|
|
m |
Н |
|
|
||
Ркоп = |
∑ {Рi ∙ |
|
|
} + |
|||
t ∙ m ∙ sin φ |
|||||||
|
|
i = 1 |
|
|
|
||
m |
Н ∙ (Н + t ∙ sin φ) |
|
|
||||
+ ∑ Si ∙ |
∙ ρ ∙ g ∙ sin φ . |
||||||
|
2 ∙ m ∙ sin2 φ |
|
|||||
i = 1 |
|
|
|
|
(23) |
||
|
|
|
|
|
|||
Аналогичным образом можно представить нормальную составляющую силы сопротивления копанию грунта цепным рабочим органом.
Заключение
Предложенные уравнения позволяют определять силу сопротивления копанию грунта цепным рабочим органом в зависимости от следующих параметров: физико-механических характеристик грунта; формы срезаемой стружки; параметров режущих элементов; режимов работы оборудования; параметров отрываемой траншеи; схемы копания (при производстве работ по подкапыванию трубопроводов и откапыванию траншеи).
Библиографический список
1.Демиденко А.И., Семкин Д.С. Сменное рабочее оборудование одноковшового экскаватора для подкопа трубопроводов./ Механизация строительства. М.: ООО «Издательство «Креативная эконо-
мика», №4 2011, 32 с. С. 10-13.
2.Патент РФ № 90461, МПК Е 02 F 3/08. Цеп-
ной экскаватор./ Демиденко А.И., Семкин Д.С.; Си-
бАДИ. 10.01.2010.
УДК 629.7
3.Федоров Д.И. Рабочие органы землеройных машин. М.: Машиностроение, 1990, 358 с.
4.Баловнев В.И. Моделирование процессов взаимодействия со средой рабочих органов дорожностроительных машин. М.: Высшая школа, 1981, 335 с.
5.Фомичев В.П. Методика расчета оптимальных режимов работы траншейных экскаваторов.
Ростов-на-Дону: Ростовский инженерностроительный институт, 1971, 118 с.
6. Писаренко Г.С. и др. Сопротивление материалов. -5-е изд., перераб. и доп. – К.: Вища шк. Головное изд-во, 1986, 735 с.
MATHEMATICAL MODEL OF INTERACTION OF CHAIN WORKING BODY WITH A GROUND
A.I. Demidenko, D.S. Semkin
Interaction of chain working body with a ground is analyzed. The equations for calculation of components of resistance to cutting and digging of a ground by cutters, and also the equation of total resistance to digging of a ground by working body a trench dredge is given.
Демиденко Анатолий Иванович – канд. техн. наук., проф., зав. каф. «Техника для строительства и сервиса нефтегазовых комплексов и инфраструктур» факультета «Нефтегазовая и строительная техника» Сибирской государственной автомобильно-дорожной академии.
Семкин Дмитрий Сергеевич - аспирант каф. «Техника для строительства и сервиса нефтегазовых комплексов и инфраструктур» факультета «Нефтегазовая и строительная техника» Сибирской государственной автомобильнодорожной академии.
E-mail: D.S.Semkin@yandex.ru
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОПТИМИЗАЦИИ МАССОВОЙ И ОБЪЕМНОЙ ХАРАКТЕРИСТИК ЭЛЕМЕНТОВ ПРИВОДА СИСТЕМЫ УПРАВЛЕНИЯ АЭРОСТАТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА
В.В. Сыркин, В.А. Трейер
Аннотация. Обоснована необходимость оптимизации массовых и объемных характеристик системы управления дирижабля. Приведена оптимизация указанных характеристик для напорного трубопровода гидропривода системы управления дирижабля за счет повышения давления в гидросистеме.
Ключевые слова: аэростатический летательный аппарат, массовая характеристика, объемная характеристика, давление, расход рабочей жидкости, напорный трубопровод.
8 |
Вестник СибАДИ, выпуск 4 (22), 2011 |
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
Для эффективного использования аэростатического летательного аппарата (АЛА) при транспортировке грузов и пассажиров, необходимо стремиться к снижению массы и объемов его функциональных элементов и систем.
Учитывая насыщенность АЛА гидравлическими системами управления, целесообразно оптимизировать массу и объем гидравлических магистралей.
Основным направлением решения данной задачи является повышение уровня давления гидросистем.
Известны исследования по оценке последствий повышения давлений, в частности [1], определение его оптимального значения по минимальному значению коэффициента недостатков
жению надежности основных агрегатов гидросистем АЛА.
Для напорного трубопровода с рабочей жидкостью составим уравнения силы веса, имеющего следующие параметры (рисунок 1):
R G 0,2WC 0,3WС 0,3WЦ 0,1Т 0,1h,
где R RP – относительный коэффициент не-
R210
достатков; G – вес гидросистемы; WC, WЦ – объем, занимаемый гидросистемой и силовыми гидроцилиндрами соответственно; Т – установившаяся температура рабочей жидкости; h – ход силовых цилиндров. Значения 1; 0,2; 0,3; 0,1 – относительные весовые коэффициенты значимости соответствующих параметров.
Повышение уровня давления на температуру жидкости оценивают по формуле
t E |
р |
|
1 |
, |
|
|
Cж
где Е – тепловой эквивалент единицы работы; р – рабочее давление; Cж – теплоемкость жидкости; γ – удельный вес жидкости; η – суммарный кпд системы.
Важно оценить влияние давления на объемные кпд насосов, усилия страгивания золотников и др. Так, для кпд насосов
об 1 р qв , qн
где р – давление; qв – объем вредного пространства; qн – объем, вытесняемый поршнем за один рабочий ход; β – коэффициент объемного сжатия жидкости; α – изменение единицы объема вредного пространства насоса при изменении давления на
0,1 МПа.
Для оценки зазоров в сопряженных парах при росте давления используются зависимости [2]:
|
рr1 |
2 |
2 |
|
|
|
рrпл |
|
|||
Ц пл |
|
r1 |
r2 |
|
|
|
1 пл пр, |
||||
E |
|
|
r2 |
Е |
|
||||||
|
r2 |
Ц |
|
||||||||
|
|
Ц |
1 |
2 |
|
|
|
|
пл |
|
|
где δ – суммарное увеличение зазора в паре «втулка-золотник»; δЦ, δпл – изменения размеров гильзы и золотника (плунжера) соответственно; 2r2, 2r1 – наружный и внутренний диаметр гильзы; 2rпл
– диаметр плунжера; σЦ, σпл – коэффициенты Пуассона материалов гильзы и плунжера; ЕЦ, Епл – модули упругости материалов гильзы и плунжера.
Инженерный опыт показал, что рост рабочего давления при проведении конструктивнотехнологических мероприятий не приводит к сни-
Рис.1. Расчетная схема напорного трубопровода
α, δ, lн – внутренний диаметр, толщина стенок и длина трубопровода;
в – допустимый предел прочности (σв
n
–действующее напряжение, n – запас прочности);
р– рабочее давление;
р– потери давления;
р Qн – относительные потери давления в
р
напорном трубопроводе; γм, γж – удельные веса материалов трубопро-
вода и жидкости; λ – коэффициент сопротивления трению;
V – скорость течения жидкости;
Q VF – расход жидкости в трубопроводе с
площадью поперечного сечения F;
N – потребляемая мощность на выходе. Прочность трубопровода
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
1 ; |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
d |
|
|
|
|
|
2p |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
вес трубопровода с жидкостью |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
d2 |
|
|
|
|
м |
|
||||
G |
|
|
G G |
|
|
|
l |
1 4 |
|
1 |
|
|
|
; |
|||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
н.тр |
|
тр |
|
|
|
ж |
|
4 |
|
ж |
d |
d |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ж |
||||||||
потери давления в трубопроводе |
|
|
|
|
|
|
|
||||||||||||||||
|
Q |
н |
р |
|
l V 2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ж |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
d 2q |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где 0,3164R 0,25 (турбулентный режим); Скорость жидкости в трубопроводе
V 4Q ;
d2
передаваемой мощности
N 1 Qн рQ.
На основании данных уравнений можно получить
Вестник СибАДИ, выпуск 4 (22), 2011 |
9 |
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
|
|
|
|
|
|
|
|
1,421 0,1054 |
|
|
|
|
2р |
|
|
|
|
|
|
|||||||||||
Gн.тр |
АGн.тр |
|
ж |
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|||||||||||||
|
|
|
1,158 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
2р ж |
|||||||||||||
|
|
|
|
|
|
|
0,3164 |
0,4210 |
|
0,2632 |
|
0,7368 |
|
0,4210 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где |
|
|
|
|
|
|
2q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
АGн.тр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
||||||||
|
|
|
|
20,5262 1 Qн 0,7368 Qн |
0,4210 |
|
|
|
|
|||||||||||||||||||||
Для объема трубопровода с жидкостью |
|
|
|
|
|
|
||||||||||||||||||||||||
W |
|
|
|
|
d 2 2l |
|
A |
|
|
ж0,4210 0,1054 |
|
|
|
, |
||||||||||||||||
|
|
|
|
|
|
|
|
р1,158 |
|
|
|
|
||||||||||||||||||
|
н.тр |
4 |
|
|
|
|
|
|
|
н |
|
|
Wн.тр |
|
|
|
|
|
|
|
2р |
|||||||||
где АW |
АG |
н.тр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
н.тр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Объемный вес в зависимости от температуры и давления можно оценить следующим образом
|
|
|
0 |
|
1 |
|
|
|
|
0 |
1 t, |
|
C 15 |
|
p |
0 |
p , |
|
E |
|||||||
|
|
|
|
|
|
где γ0 – объемный вес при t = 150С и р = 0,1 МПа;
Е Ар В – изотермический модуль упругости.
Динамическая вязкость
0е а р р0 t t0 ,
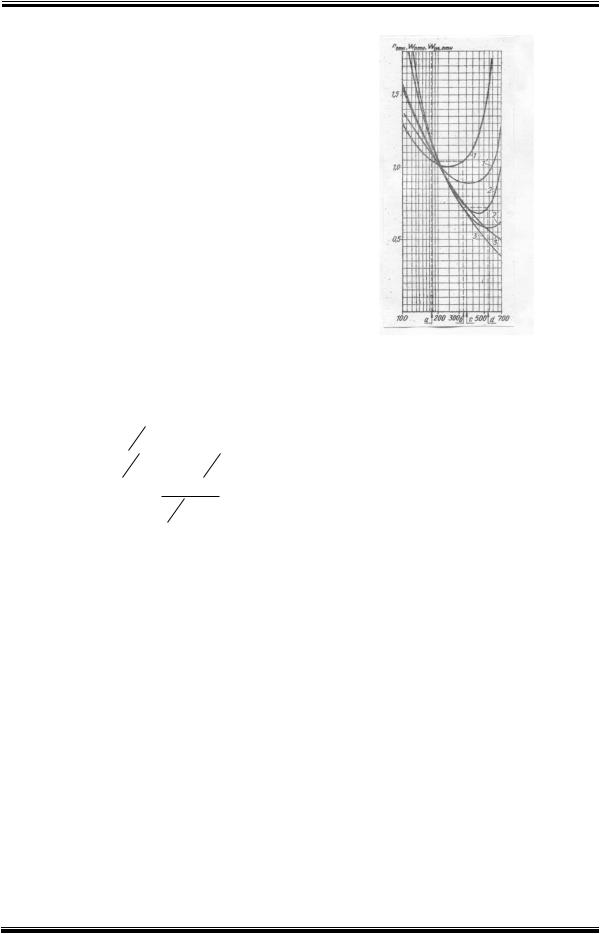
Рис. 2. Зависимости Gотн(р), Wотн(р), Wуд.отн(р) для напорного трубопровода из стали и титана
где а и λ – термический и пьезотермический коэффициент вязкости.
Удельный объем трубопровода
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
м |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
WG |
|
|
|
ж |
|
|
|
р 2кр |
|
р |
|
2 |
|
|
|
гд |
||||||||||
|
|
|
0 |
|
|
0 |
|
|
|
|
|
0 |
|
|
ж |
||||||||||||||
Wуд.отн |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||||
|
W G |
|
|
ж |
|
|
|
|
2кр |
|
|
м |
|
|
|
|
|
||||||||||||
|
|
|
|
0 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2к |
р |
|
ж |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
р0 |
|
|
|
|
|
|
|
|
|
|
|
е к |
р |
|
|
|
. |
На рисунке 2 приведены графики для |
|||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
р0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
стальных и титановых трубопроводов. Для стальных трубопроводов минимальный вес достигается при 18
– 30 МПа, для титановых – при 35 – 54 МПа. Приведенные зависимости обусловлены тем,
что при определенной мощности на выходе и постоянных относительных потерях, увеличение рабочего давления вызывает непрерывное уменьшение необходимого расхода (диаметра трубопровода, веса и объема жидкости в нем). Начиная с некоторого давления, происходит рост толщины стенок трубопровода δ, т.е. веса и объема (по условиям прочности). Действие указанных факторов обуславливает наличие минимума в зависимостях
Gотн f p и Wотн f p . Применение титановых сплавов из-за их высокой удельной прочности снижает предельные значения веса на 11% и объема 9%.
На графике (рисунок 2) 1, 2, 3 – Gотн, Wотн, Wуд.отн для стального трубопровода; 1', 2', 3' – Gотн, Wотн, Wуд.отн для титанового трубопровода; а – в, с – d – пятипроцентные зоны проигрыша в весе [3].
Библиографический список
1. Cooke C.H. Product Engineering, №5, May,
1956.
2. Распределительные и регулирующие устройства гидросистем. М.: Машиностроение, 1965,
183с.
3.Расчет и испытание гидравлических систем летательных аппаратов. М.: Машиностроение, 1974, 180 с.
OPTIMIZATION OF MASS AND VOLUME CHARACTERISTICS OF THE DISCHARGE PIPE OF A HYDRAULIC SYSTEM CONTROL AEROSTATIC AIRCRAFT (BLIMP)
V.V. Syrkin, V.A. Treier
The necessity of optimization of optimizing the mass and volume characteristics of the blimp’s control system. It is made optimization of these characteristics for the discharge pipe of a hydraulic system controls the airship by increasing the pressure in the hydraulic system.
Сыркин Владимир Васильевич – доктор технических наук, доцент, заведующий кафедрой кафедра «Прикладная механика» СибАДИ. Основные направления научной деятельности: машиноведение, системы приводов и детали машин. Общее количество опубликованных работ: 97.
Трейер Виктор Артурович - старший преподаватель кафедры кафедра «Прикладная механика» СибАДИ. Основные направления научной деятельности: машиноведение, системы приводов и детали машин. Общее количество опубликованных работ: 5.
10 |
Вестник СибАДИ, выпуск 4 (22), 2011 |