

ШЭД, можно осуществлять плавное растормаживание или затормаживание механизма крана, т.е. дистанционное изменение тормозного момента, в том числе компенсацию износа накладок. При повороте вала ШЭД 1 вращение через муфту 2 передается на ШВП 3, гайка которого неподвижна. За счет вертикального перемещения винта ШВП происходит, через шарнирно-рычажную систему, отвод (подвод) колодок тормоза.
Некоторые зависимости для ШВП:
– скорость vв винта, м/с vв = z р pвnв / 60;
– крутящий момент Тв, Н∙м, на винте при силе сопротивления
F , Н, |
Т |
|
= F |
d2 |
tg(α + ρ); |
|
|
|
|
|
||
|
2 |
|
|
|
|
|
||||||
с |
|
|
в |
c |
|
|
|
|
|
|
|
|
|
– передаточное число u = πd2 / pвz р, |
|
|
|||||||||
где |
pв −шаг винта; zр −количество |
заходов резьбы; |
nв −частота |
|||||||||
вращения |
|
винта; |
d2 −средний |
диаметр |
резьбы; α −угол подъема |
|||||||
винтовой |
|
линии, |
α = arctg[ p /(πd2 )]; |
ρ −угол трения, |
ρ = arctgf , |
|||||||
(здесь f |
− |
|
|
|
|
|
|
|
И |
|
||
коэффициент трения между витками гайки и винта). Для |
||||||||||||
ШВП f |
= tgρ ≈0,005…0,01. |
|
Д |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
Разработанное устройство управления тормозом на основе ШЭД |
|||||||||||
и |
ШВП, |
|
обеспечивающее |
плавное |
|
и бесшумное |
замыкание |
|||||
(размыкание) тормоза с д станционнымА |
регулированием тормозного |
|||||||||||
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
момента, обладает патентной чистотой и конструктивной простотой |
||||||||||||
|
|
|
|
С |
|
|
|
|
|
|
||
по сравнению с разработками последних лет. |
|
|||||||||||
|
|
|
|
|
|
|
Контрольные вопросы |
|
||||
|
1. Как подразделяют тормоза по принципу действия? |
|
||||||||||
|
2. Как устроен и работает шаговый электродвигатель, где его |
|||||||||||
применяют? |
|
|
|
|
|
|
|
|
||||
|
3. С |
|
|
какой |
целью в |
приводах |
применяют |
тормоза с |
||||
электрогидравлическим толкателем?
35
8. ПРИВОД МЕХАНИЗМА С ГИБКИМ ТЯГОВЫМ ЭЛЕМЕНТОМ
Вкачестве гибкого элемента используют цепи, стальные канаты,
вданном случае принята конвейерная лента. Срок службы конвейерной резинотканевой ленты в наибольшей степени зависит от количества перегибов ленты на барабанах. Стремление повысить тягово-сцепные свойства привода за счет увеличения угла обхвата
барабана лентой с доведением его численного значения до α ≥ 400о (двухбарабанный привод) сокращает долговечность ленты из-за ее расслоения.
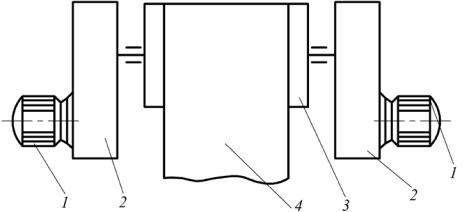
Увеличить тяговую силу с одновременным уменьшением
количества перегибов ленты можно за счет использования привода, схема которого изображена на рис. 8.1.
|
|
|
И |
|
|
|
|
Д |
|
|
|
|
А |
|
|
|
|
б |
|
|
|
|
|
Р с. 8.1. Схема привода |
|
|
|||
и |
|
|
|
1, два редуктора |
2, |
Привод (рис. 8.1) содержит два двигателя |
|||||
барабан 3 (одинСиз трех) и ленту 4. Двигатель 1 прифланцован к редуктору 2. Тихоходный вал редуктора выполнен полым со шлицевым соединением вала барабана.
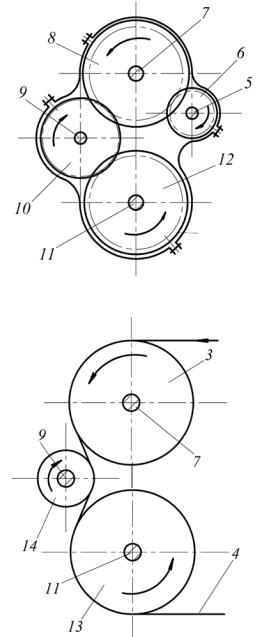
Схема редуктора изображена на рис. 8.2. Вал 5 редуктора соединен шлицевой втулкой с валом двигателя. На валу 5 закреплено зубчатое колесо (шестерня) 6, находящееся в зацеплении с колесом 8, закрепленным на валу 7. Колесо 8 находится в зацеплении с промежуточным («паразитным») колесом 10, закрепленным на валу 9 и находящимся в зацеплении с колесом 12, закрепленным на валу 11. Валы 7, 9, 11 соединены с валами барабанов. Расположение барабанов показано на рис. 8.3.
36
|
Рис. 8.2. Схема редуктора |
|||
|
|
|
|
И |
|
|
|
Д |
|
|
|
А |
|
|
|
б |
|
|
|
и |
|
|
|
|
С |
|
|
|
|
Рис. 8.3. хема расположения барабанов
Барабан 3 приводится во вращение от вала 7; барабан 14 – от вала 9; барабан 13 – от вала 11. Барабаны 3 и 13 вращаются с одинаковой частотой, но имеют разный диаметр: D13 > D3 . Разность (D13 − D3 )
составляет 20…30 мм. Поскольку линейная скорость v по средней линии толщины ленты 4 связана с частотой вращения n и диаметром D′( D′ = D +δл) барабана известным соотношением
v = πD′n / 60 , |
|
то при указанной разности диаметров D13 |
и D3 скорость v13 будет |
больше v3 . Разность в с коростях может |
составлять (3…5)%, что |
37 |
|
сопоставимо с удлинением ленты под воздействием тягового усилия. Большая скорость на поверхности барабана 13 позволяет компенсировать упругую деформацию (удлинение) ленты, обеспечивает дополнительное прижатие ленты к барабану 3 с необходимым увеличением тягово-сцепных свойств привода. Суммарный угол α обхвата лентой барабанов 3 и 13 не превышает
190о. В применяемых ныне двухбарабанных приводах α ≥ 400о. Двухкратное уменьшение угла обхвата с соответствующим уменьшением перегибов ленты приведет к двойному увеличению долговечности ленты.
Контрольные вопросы
|
|
|
|
И |
1. Отчего зависит выбор типоразмера конвейерной ленты? |
||||
2. Какие способы увеличения тяговой способности приводного |
||||
барабана существуют? |
|
|
Д |
|
|
|
|
|
|
3. Отчего зависит угол обхвата барабана лентой? |
||||
|
|
А |
|
|
|
б |
|
|
|
и |
|
|
|
|
С |
|
|
|
|
38