

Постоянные магниты 2 индукторов изготовлены из сплава SmCo5. Модуль имеет компактную конструкцию с высокими динамическими свойствами. Усилие на штоке 1 до 75 кН. Скорость до 0,1 м/с. Ход до
180 мм.
Контрольные вопросы
1. Какие виды сцепных фрикционных муфт различают?
2. Почему преимущественное применение среди фрикционных муфт имеют многодисковые муфты?
3. Что подразумевается под шарико-винтовой передачей?
5. МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В РЕДУКТОРЕ |
||
Неотъемлемой частью |
И |
|
всех крановых |
механизмов является |
|
редуктор. В основном это |
Д |
зубчатые редукторы с |
горизонтальные |
||
постоянным передаточным числом.
Разновидностью редукторов можно считать КПП ТС, в том числе АКПП. В данных КПП используют планетарные передачи с двухкаскадной электронно-гидравлической системой управления [11,12]. Для переключения передач используют фрикционные
элементы: муфты и тормоза. На каждой передаче может быть |
|
и |
|
включено различное сочетаниеАфрикционных элементов: две муфты и |
|
тормоз; два тормоза |
муфта и т.д. Для управления муфтами и |
С |
бс лового привода используют кольцевые |
тормозами в качестве |
|
гидроцилиндры. В АКПП легковых автомобилей используют роликовые обгонные муфты, которые обладают односторонним действием.
ТС с приводом от двигателя внутреннего сгорания (ДВС) имеют 4…8 скоростей вперед и одну скорость заднего хода, зависящих от частоты вращения ДВС. В крановых механизмах при всех рабочих операциях должно быть обеспечено возвратно-поступательное движение с одинаковым управлением скоростями за счет реверсирования электродвигателя.
Из изложенного следует сделать вывод, что применение КПП ТС для крановых механизмов невозможно. Известны предложения по редуктору с переменным передаточным числом для крановых механизмов передвижения [13].
21
Цель данной инновационной разработки – обосновать возможность создания механизма переключения передач редуктора в виде фрикционного устройства типа роликовой обгонной муфты, действующего при любом из двух направлений вращения ведущего вала и обеспечивающего включение (выключение) передачи, а также в качестве тормоза.
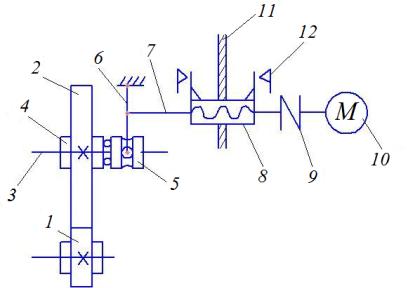
На рис. 5.1 изображен фрагмент кинематической схемы редуктора. Шестерня 1 передает вращение на колесо 2, закрепленное на шлицевом валу 3. В колесо 2 встроен механизм переключения 4. Для управления механизмом используется устройство, состоящее из ползуна 5, перемещаемого по валу 3 вилкой 6. Вилка 6 тягой 7 соединена с ШВП 8, приводимой во вращение электродвигателем 10
через муфту 9. ШВП закреплена в стенке 11 редуктора. Концевые |
|||||||
выключатели 12 |
|
|
|
|
И |
||
ограничивают ход ползуна |
5 |
в необходимых |
|||||
пределах. |
|
|
|
Д |
|
|
|
|
|
|
|
|
|
||
|
|
|
А |
|
|
|
|
|
|
б |
|
|
|
|
|
|
и |
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
Рис. 5.1. Фрагмент кинематической схемы редуктора
Собственно механизм переключения изображен на рис. 5.2. Он содержит втулку 4, в расточки которой и колеса 2 помещены конические ролики 13, соединенные сепаратором (не показан). Втулка 4 соединена с ползуном 5 кинематической связью 14.
На рис. 5.3 показан вариант выполнения кинематической связи 14. Во втулку 4 установлено наружное кольцо 15 радиально-упорного шарикоподшипника, зафиксированное пружинным стопорным кольцом 16. В ползуне 5 установлено внутреннее кольцо 17 подшипника и зафиксировано кольцом 18. Тем самым обеспечена
22
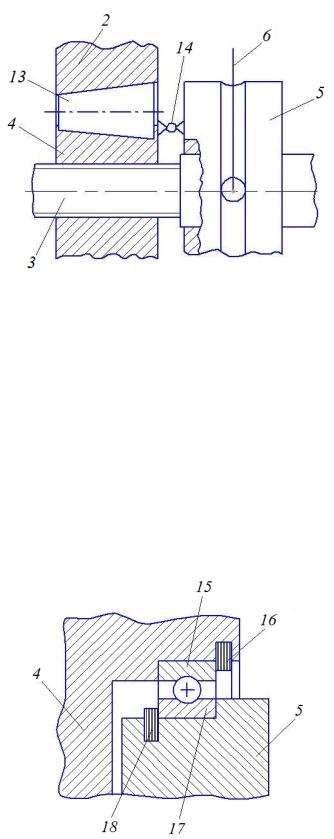
независимость вращения деталей 4, 5 и передача силового воздействия при включении (выключении) механизма.
Рис. 5.2. Схема механизма переключения передач
Работает механизм переключения передач следующим образом.
В исходном положении втулка 4 находится в левом положении. |
|
Ролики 13 |
И |
заклинены, и происходит передача вращающего момента |
|
T от шестерни 1 на колесо 2 независимо от направления вращения |
|
(по или |
Д |
против часовой стрелке). Для выключения передачи |
|
включают электродвигатель 10.АВ ШВП 8 вращательное движение преобразуется в поступательное и тяга 7 через вилку 6 отводит ползун
вращается; колесо 2 неподвижно. Передача момента T невозможна.
5, а тем самым и втулку 4 |
через связь 14, вправо. Взамен натяга |
||||
между |
роликами |
|
б |
коническими |
|
13 |
соответствующими |
||||
поверхностями втулки 4 |
колеса 2 появляется зазор. Втулка 4 |
||||
|
|
и |
|
|
|
|
С |
|
|
|
|
Рис. 5.3. Схема кинематической связи
23
Как известно, зубчатые передачи бывают прямозубые, косозубые и шевронные [14, 15]. В зацеплении при передаче вращающего момента возникают силы: окружная и радиальная – в прямозубых и шевронных; окружная, радиальная и осевая – в косозубых. Для их определения используют формулы
Ft = 2T dw ; Fr = 2Ttgαtw
dw ; Fr = 2Ttgαtw  dw ; Fa = 2Ttgβ
dw ; Fa = 2Ttgβ dw ,
dw ,
где Ft , Fr , Fa − силы окружная, радиальная и осевая соответственно; dw −начальный диаметр зубчатых колес; αtw −угол зацепления; β−угол наклона линии зуба.
Из этого следует, что наиболее приемлемым для данного случая переключения передач является шевронное зацепление, в котором
осевые силы |
уравновешены |
(шестерня |
1 закреплена |
на |
валу |
|||
неподвижно в осевом направлении). |
|
И |
|
|
|
|||
|
|
|
|
|
||||
|
|
|
|
Д |
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
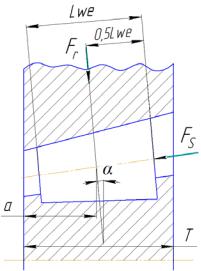
Рис. 5.4. Определение точек приложения сил |
|
|
|||||
В основу расчета данного механизма может быть принята |
||||||||
долговечность Lh в часах [14] |
(105 / 6n)(C / |
F )p , |
|
|
|
|||
|
|
L = |
|
|
|
|||
где n −частота |
|
h |
|
|
e |
C −коэффициент |
||
вращения |
вала |
двигателя; |
||||||
динамической |
работоспособности; |
p =3,33; Fe −эквивалентная |
||||||
нагрузка, которая может быть определена по формуле |
|
|
||||||
|
|
Fe = (хKv Fr + yFa )KδKт, |
( Fa |
|
|
|||
где х, у−коэффициент радиальной и |
осевой |
= 0 ) |
сил |
|||||
соответственно ( х=0,4); Kv −коэффициент учета вращения деталей 2
24
или 4; Kδ −коэффициент безопасности (для редукторов Kδ =1,3…1,5); Kт −температурный коэффициент ( Kт=1,25 при температуре 2000С)
[14].
Под действием радиальной силы Fr в механизме возникает внутренняя осевая сила Fs (рис. 5.4), которую следует приложить к
ползуну 5.
Предложена и обоснована простая и надежная конструкция механизма переключения передач в редукторе. Тем самым появляется возможность разработать редуктор с переменным передаточным числом и с его помощью управлять скоростями рабочих операций: скорости крана, крановой тележки и др.
1.В чем заключается принципДработыИкоробки перемены передач?
2.Что определяет такое понятие, как «нагрузочная способность передачи», и какая ступень редуктораАявляется более нагруженной?
3.В чем заключаются преимущества и недостатки передачи «винт-гайка»? б
6.РЕДУКТОРиС РЕГУЛИРУЕМЫМ ПЕРЕДАТОЧНЫМ оттипа крана иСмеханизма редуктор может быть одно-, двух или
трехступенчатым, т.е. иметь от одной до трех пар зубчатых колес. Каждая пара зубчатых колес имеет постоянное передаточное число, как и редуктор в целом. Для управления (изменения) скоростей рабочих операций: передвижения крана, тележки – используют тиристорный электропривод, работа которого сопровождается преобразованием электроэнергии, что приводит к потерям.
Исходя из изложенного, следует признать актуальным разработку редуктора с регулируемым передаточным числом. Такой редуктор позволит управлять скоростями рабочих операций средствами механики сиспользованием обычного промышленногоэлектропривода.
Попытки создания редукторов с переменным передаточным числом предпринимались неоднократно [13].
25
К наиболее близким по технической сущности к редукторам с регулируемым передаточным числом могут быть отнесены планетарные КПП ТС, в том числе АКПП [12, 13].
Для переключения передач в КПП используют фрикционные муфты и тормоза по три указанных элемента на каждой передаче. Для управления муфтами и тормозами используют гидропривод (кольцевые гидроцилиндры) или электропривод [16].
В КПП легковых автомобилей используют неуправляемые роликовые обгонные муфты одностороннего действия.
КПП ТС непригодны для использования в приводах крановых механизмов, т.к. они не могут обеспечить возвратно-поступательное движение крана (тележки).
Кинематическая схема предлагаемого редуктора изображена на |
|||||
рис. 6.1. |
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
А |
|
|
|
|
б |
|
|
|
|
и |
|
|
|
|
|
С |
|
|
|
|
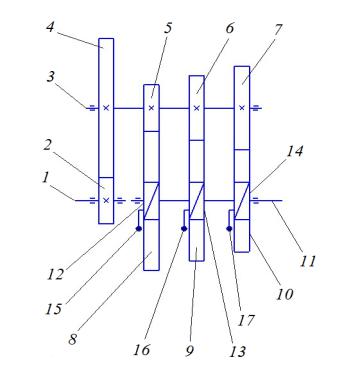
Рис. 6.1. Кинематическая схема редуктора
Редуктор содержит входной вал 1, на котором закреплена шестерня 2, находящаяся в зацеплении с зубчатым колесом 4, закрепленном на валу 3. На валу 3 закреплены шестерни 5, 6 и 7, находящиеся в зацеплении с колесами 8, 9 и 10. Упомянутые зубчатые колеса 8, 9, 10 закреплены на выходном валу 11. В каждое колесо 8, 9, 10 встроены муфты 12, 13 и 14 соответственно. Каждая из упомянутых муфт управляется механизмами 15, 16, 17 переключения
26

передач. Конструкции встроенных муфт и механизмов переключения передач описаны в разд. 5.
Редуктор содержит (см. слева направо) четыре зубчатых пары (ступени) с передаточными числами u1, u2 , u3 , u4 .
Следовательно, передаточные числа uп1 , uп2 , uп3 передач будут:
на первой uп1 = u1u2 ; на второй – uп2 = u1u3 ; на третьей – uп3 = u1u4 . В наибольших масштабах используются мостовые краны
грузоподъемностью Q=20–25 т. Скорости перемещенияуказанных кранов и их тележек находятся в диапазоне 0,5–1,5 м/с. При пуске (разгоне) крана (тележки) происходит раскачивание груза идинамические воздействия на металлоконструкцию, сокращающие срок ее работы. Поэтому необходим плавный пуск (разгон) крана (тележки) с ускорением a не более 0,2 м/с2. Обеспечить данные условия возможно при соответствующем переключении передач в предлагаемом редукторе.
|
Передаточное |
|
число |
uп |
передачи |
для |
указанного диапазона |
|||||||||||||
скоростей v крана (тележки) можно определить по формуле |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
u=π |
D |
60n , v |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
А |
И |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
п |
|
|
хк |
n −частота |
||||||
где Dхк −диаметр |
ходового |
колеса крана (тележки); |
||||||||||||||||||
вращения вала двигателя. Приняв |
D |
=0,25–0,32 |
м; n =1000–1500 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Дхк |
|
1 |
|
|
|
||
мин-1 и исходя из стандартного ряда передаточных чисел редуктора |
||||||||||||||||||||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|||
2,5; 4,0; 5,0; 6,3; 8,0 можно предложить разбивку передаточных чисел |
||||||||||||||||||||
по ступеням и итоговые скорости перемещения |
крана |
(тележки) |
||||||||||||||||||
(табл. 6.1). |
|
|
|
|
|
|
б |
|
|
|
|
|
|
Таблица 6.1 |
||||||
|
|
|
|
|
Параметры редуктора и крана (тележки) |
|||||||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
тупень |
|
|
|
|
|
|
|
Частота |
|
Скорость |
|||||
|
Передача |
|
С |
|
|
|
|
Передаточное |
|
вращения |
|
крана |
|
|||||||
|
1 |
|
|
|
3 |
4 |
|
|
||||||||||||
|
|
|
|
2 |
|
|
|
|
|
число |
|
колеса, |
|
(тележки), |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мин-1 |
|
м/с |
|
|
|
1-я |
+ |
|
+ |
|
|
– |
– |
|
|
|
32 |
|
|
30 |
|
0,4 |
|
||
|
2-я |
+ |
|
– |
|
|
+ |
– |
|
|
|
16 |
|
|
60 |
|
0,8 |
|
||
|
3-я |
+ |
|
– |
|
|
– |
+ |
|
|
|
10 |
|
|
100 |
|
1,4 |
|
||
|
Знак «+» |
муфта |
включена, знак «–» выключена |
|
|
|
|
|
||||||||||||
|
Передаточное |
|
число |
u1 |
|
первой |
ступени желательно иметь |
|||||||||||||
наименьшим. Но при трех передачах это неосуществимо. Вероятен вариант редуктора с муфтами в шестернях, но это неизбежно повлечет искусственное увеличение размеров зубчатых передач.
27

Для первой ступени редуктора может быть рекомендовано косозубое зацепление; для остальных трех – шевронное. При
шевронном зацеплении осевая сила Fа=0; радиальная Fr = 2Ttgαtw  dw , где T −вращающий момент; αtw −начальный диаметр зубчатых колес.
dw , где T −вращающий момент; αtw −начальный диаметр зубчатых колес.
Радиальную силу Fr можно выразить через параметры тел качения
[17]
Fr = kмzd cosβ,
где kм −численный коэффициент, характеризующий статическую
стойкость муфты (k =2,2) [17]; z −количество тел качения; d и − диаметр и длина тел качения; β−угол контакта тел качения с
поверхностями полумуфт.
Обгонная муфта с цилиндрическими роликами имеет сходство с предложенной конструкцией муфты. На ролик обгонной муфты
действуют силы: нормальная FN и касательная FT , при этом |
|
|||||||||
|
|
|
|
|
|
Д |
|
|||
|
|
F |
|
= 2Tctg(α/ 2) , |
|
|||||
|
|
N |
|
|
0zDм |
И |
|
|||
|
|
|
|
|
|
|
||||
где α−угол заклинивания |
А |
Dм −диаметр поверхности |
||||||||
|
(α |
|
5 ); |
|
||||||
наружной полумуфты. |
б |
|
|
|
d |
|
||||
Зная силу FN , можно определить контактные напряжения |
σк , |
|||||||||
возникающие на линии контакта ролика с поверхностью |
|
|||||||||
С |
σ |
к |
= 0,418 |
2FN E |
, |
|
||||
|
|
|
|
|
|
|
|
|
||
где E −модуль нормальнойиупругости.
Величина σк может составлять 900–1200 МПа (большие значения при работе муфты в режиме тормоза).
Привод механизмов переключения передач 15 и 16 может быть объединен: при выключении муфты 12 в течение 0,5 с включается муфта 13 с необходимым «перекрытием» [12], т.е. когда одна муфта еще не выключилась, а вторая включается, что способствует плавности движения крана (тележки). Для включения (выключения) муфты достаточно перемещение втулки на ~0,5 мм. При значительных моментах (Т>1кНм) возможно двухрядное или четырехрядное расположение роликов. При трехвальном исполнении возможна разработка редуктора с 4–6 передачами, в том числе КПП ТС, более компактная, чем современные планетарные КПП ТС.
28