

Контрольные вопросы
1.Как устроена автоматическая коробка передач?
2.Как устроены планетарные передачи, каковы их преимущества
инедостатки?
3.От каких факторов зависит направление окружной и осевой сил в косозубой передаче?
7.УПРАВЛЕНИЕ ТОРМОЗАМИ КРАНОВЫХ МЕХАНИЗМОВ
Крановые механизмы содержат тормоза различного типа. Преимущественно используют двухколодочный тормоз. Каждый тормоз имеет устройство управления, которое включает устройство замыкания (чаще всего пружина сжатия) Ии устройство размыкания того или иного электротехнического типа. Выявилась тенденция усложнения устройств управления тормозамиД. Они становятся все более громоздкими и энергоемкими. Необходим поиск новых технических решений в области принципов управления тормозами с обеспечением дистанционного Арегулирования тормозного момента.
Тормоза предназначены для поглощения кинетической энергии движущихся масс крана, бего механизмов и груза и используются как для стопорения, так и для регулирования скорости движения [7]. Они различаются по конструкциии (колодочные, ленточные, дисковые, конические), назначен ю (спускные, стопорные), принципу действия (нормально замкнутыеС, нормально разомкнутые или автоматические). Преимущественное пр менение находят колодочные нормально замкнутые тормоза. Дисковые тормоза применяют в талях, конические – в механизмах с ручным приводом [7].
В механизмах подъема груза и изменения вылета стрелы с машинным приводом должны быть установлены нормально замкнутые тормоза, автоматически размыкающиеся при включении привода механизма [1]. В механизмах передвижения и поворота применяют как нормально замкнутые, так и комбинированные тормоза, т.е. такие, которые при штатной эксплуатации работают как нормально разомкнутые, а в аварийной ситуации – как нормально замкнутые.
Двухколодочный тормоз, как и любой другой, содержит фрикционную пару, в данном случае (рис. 7.1) колодки 3 (с накладкой или без) и шкив 4, устройство замыкания в виде пружин 1 и 2,
29
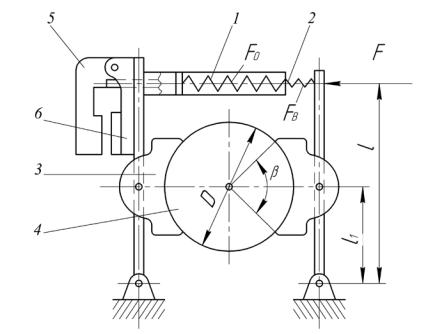
устройство размыкания в виде однофазного электромагнита клапанного типа в составе якоря 5 и катушки 6. В состав тормоза любого типа входит шарнирно-рычажная система (на рис. 7.1 не обозначена).
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
Д |
|||||
|
|
|
|
|
А |
|
|
|
|||||
|
Рис. 7.1. Схема двухколодочного тормоза |
||||||||||||
|
с электромагнитом клапанного типа |
||||||||||||
|
|
б |
|
|
|
|
|
|
|||||
Применительно к колодочным тормозам справедливы следующие |
|||||||||||||
зависимости [7]: |
и |
|
|
|
|
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– тормозной момент Тт, развиваемый тормозом |
|||||||||||||
С |
Т |
т |
= F |
р |
fD |
т |
|
η |
ш |
; |
|||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||
– результирующая сила Fр , которую должно развивать
устройство замыкания
Fр =Тт 1 /( fDтηш );
–давление р между шкивом и колодкой
р=Тт ( fDтА) ≤[р];
( fDтА) ≤[р];
–необходимое усилие Fп основной пружины
Fп = F + Fв,
где f −коэффициент трения |
между колодкой и |
шкивом; |
Dт −диаметр тормозного шкива; |
ηш −КПД рычажной |
системы |
(ηш ≈0,95); , 1 −длины плеч рычагов; Fв −усилие вспомогательной
30
пружины (служит для обеспечения гарантированного зазора между шкивом и колодкой при выключении тормоза); А−площадь рабочей поверхности одной тормозной колодки
А= πDтβB / 3600,
где B −ширина колодки; β−угол обхвата шкива одной колодкой (β≈700); [р]−допускаемое давление (от 0,2 до 2,0 МПа в зависимости
от фрикционной пары).
При установочном зазоре ε между колодкой и шкивом ход h
пружины в тормозе h =ε  1 .
1 .
Выбор электромагнитов для двухколодочных тормозов производят на основании зависимости
W = 4Tтε/( fDт), |
|
|
||
где W −работа, производимая электромагнитом. |
|
|||
Для электромагнитов с поступательным движением якоря |
||||
W = Fмhkя, |
|
kя −коэффициент |
||
где Fм −тяговое усилие электромагнита; |
h −ход якоря; |
|||
использования хода якоря (kя=0,85). |
|
И |
||
Для электромагнитов клапанного типа |
|
|
||
б |
|
|
|
|
W =Т ϕДk , |
|
|||
|
м |
я |
|
|
где Тм −момент электромагнита; ϕ −угол поворота якоря. |
||||
и |
|
|
|
|
Для данного т па устройстваАразмыкания тормоза выявились
недостатки: огран ченный ресурс (не более 1 млн срабатываний); шумовое загрязненСе окружающей среды (резкие щелчки). Главный недостаток – невозможность дистанционного изменения тормозного момента. Необходимо остановить работу и вручную регулировать усилие (затяжку) пружины. Чтобы избежать указанного недостатка стали применять тормоза с электрогидравлическим толкателем (рис. 7.2). Толкатель электрогидравлический (ТЭГ) – комбинированное устройство, состоящее из электродвигателя, насоса и гидроцилиндра, работает бесшумно, ресурс до 10 млн срабатываний.
Некоторые зависимости для тормоза с ТЭГ [18]:
– усилие F1, приложенное к рычагам
F1 =Tт 1 /( fDтηш );
– усилие F пружины
F= F1 2 / 3;
–усилие Fp размыкания
31
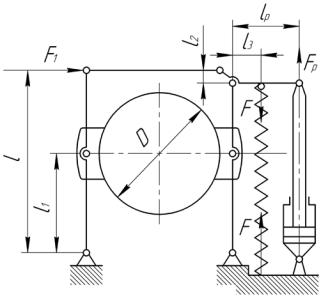
Fp =1,15F p / 3.
С другой стороны, Fp = pπdп2 / 4,
где p −давление жидкости в ТЭГ; dп −диаметр поршня ТЭГ;2 , 3 , p −длины плеч рычагов.
|
|
|
И |
|
|
Д |
|
|
А |
|
|
Рис. 7.2. Схема колодочного тормоза |
|||
б |
|
|
|
с электрогидравлическим толкателем |
|||
и |
|
|
|
У тормоза с ТЭГ также невозможно дистанционно изменять
тормозной момент. Кроме того, для механизмов передвижения с большим ходом (кран, тележка) ТЭГ остаётся включенным длительное время (2…3 м н). Наличие в ТЭГ вращающихся деталей приводит к износу их.
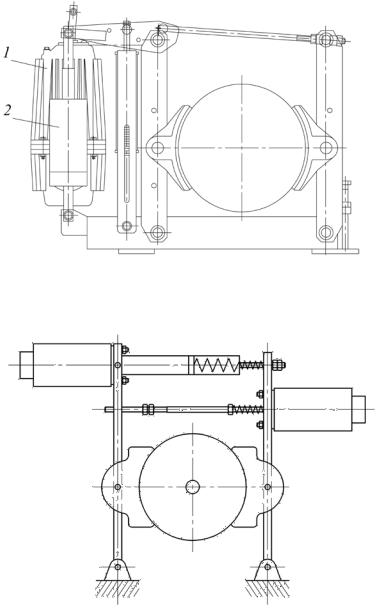
(рис. 7.3) с комбинированнымС управлением. Размыкание производит ТЭГ 1, после чего отключается. Дальнейшее удержание колодок в разомкнутом состоянии обеспечивает электромагнит 2. Достигнуто плавное и бесшумное размыкание с уменьшением износа деталей ТЭГ. Дистанционное изменение параметра настройки – тормозного момента – в этой конструкции невозможно.
Для уменьшения этого недостатка разработан [19] тормоз
В какой-то мере избавлен от этого недостатка тормоз (рис. 7.4) ТКПА-200, предлагаемый НПО «Подъемтранссервис» (журнал «Подъемно-транспортное дело», 2010 г., №1, 3-я стр. обложки). Тормоз содержит два среднеходовых магнита постоянного тока. Уверяют, что обеспечено плавное и ступенчатое торможение. В
32
указанном материале рекламного характера принцип (алгоритм) управления не раскрыт.
Рис. 7.3. Колодочный тормоз с комбинированным устройством размыкания
|
|
|
|
И |
|
|
|
Д |
|
|
|
А |
|
|
|
б |
|
|
|
и |
|
|
|
|
С |
|
|
|
|
Рис. 7.4. Схема двухколодочного тормоза с двумя среднеходовыми магнитами постоянного тока
Из представленного обзора устройств управления тормозами вытекает тенденция усложнения их конструкции, которая позволяет достичь каких-то промежуточных результатов, но не обеспечивает главного – возможности дистанционного изменения тормозного момента. Исходя из анализа достоинств и недостатков существующих тормозов предложен вариант системы управления тормозом
(рис. 7.5).
33
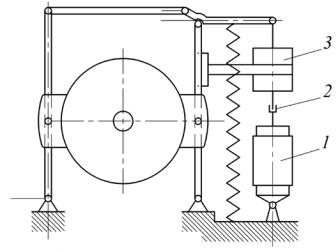
Рис. 7.5. Схема колодочного тормоза со специальным устройством размыкания
Устройство замыкания – пружина в сочетании с рычажно-
шарнирной системой по схеме для тормоза с ТЭГ (рис. 7.2).
электродвигатель с несколькимиАДобмотками, в котором ток, подаваемый в одну из обмотокбстатора, вызывает фиксацию ротора. Последовательная активация о моток двигателя вызывает дискретные угловые перемещенияи(шаги) ротора. При использовании 4-х основных полюсов угол поворота (шаг) ротора 3,60. При большем количестве полюсовСможно обеспечить шаг в пределах долей градуса. ШЭД широко распространены и используются в роботах, станках. Предлагаются ШЭД на любые параметры (мощность до 3 кВт) с комплектами управления [20].
Устройство размыкания содержит шаговый электродвигатель
(ШЭД) 1, шлицевую муфту 2 |
и ШВП 3. |
И |
Согласно «Википедии» |
|
|
ШЭД – это синхронный бесщеточный |
||
ШВП также широко распространены и используются в приводах роботов, станков с ЧПУ и позволяют реализовать усилия до 70 кН, ход серийных образцов до 7 метров [21].
Работает предлагаемое устройство размыкания следующим образом. При подаче напряжения на электродвигатель кранового механизма поступает электрический ток на программируемую систему управления ШЭД 1. Она может быть настроена так, что выдает на ШЭД наибольшее количество импульсов, при которых колодки тормоза отходят на величину ε , обеспечив гарантированное растормаживание. При отключении двигателя механизма система управления обеспечивает обратный ход ШЭД с соответствующим замыканием тормоза. Изменяя количество импульсов, подаваемых на
34