

Если ускорение все же окажется неприемлемым из-за величины ∆ti ,
то можно применять двигатели серии МАП или двух- (трехскоростные) МТКF. Во всяком случае громоздкая и дорогая система управления будет исключена.
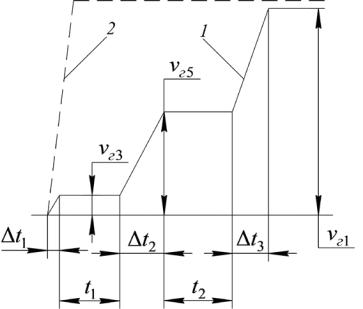
АДИ Рис. 2.2. Примерная диаграмма скоростного режима
механизма подъемабс грузом (1) и без груза (2)
Главное преимуществоирассмотренного МПГ – наличие посадочных скоростей, столь необход мых при монтажных работах и операциях, плавный пускСс м н мальными динамическими воздействиями на металлоконструкц ю, сокращение цикла. Диапазон регулирования
посадочной скорости vг3 : vг4 =1:20 и более.
Для управления двигателями достаточно иметь стандартные магнитные пускатели с кнопками «пуск», «стоп» и клавиши, объединяющие кнопки «пуск–пуск», «пуск–стоп», «стоп–стоп» обоих двигателей. Определение мощности и методика выбора двигателей требуют дополнительных исследований. Решающее влияние при этом будут иметь группа режима и перегрузочная способность (не менее трехкратной) двигателей серии МТКF.
Контрольные вопросы и задания
1. Что называется редуктором и каково его назначение в приводе машины?
10
2.Каковы основные причины потери мощности в редукторе.
3.Приведите достоинства многоступенчатых передач по сравнению с одноступенчатыми передачами.
3. УПРАВЛЕНИЕ СКОРОСТЬЮ ПОДЪЕМА ГРУЗА КРАНОВЫМ МЕХАНИЗМОМ (ВАРИАНТ 2)
Одна из особенностей работы МПГ – высокие динамические нагрузки. Это относится и к приводам (приводным станциям) наклонных цепных конвейеров. В обоих случаях необходим плавный пуск (разгон), а для грузоподъемных кранов кроме того необходимо обеспечить малые (посадочные) скорости, т.е. приблизительно
электронных устройств для управления скоростью подъема груза при
10-кратный диапазон изменения скорости подъема – опускания груза. В работе [5] показана неэффективностьИэлектротехнических и
использовании асинхронных двигателейДтрехфазного тока и
обоснована возможность управления этой скоростью, обеспечиваемой МПГ с помощью только механических устройств. В работе [6] подобная задача решена применениемАв механизме плавного пуска двухступенчатого планетарного редуктора, обгонной и фрикционной муфт. б
Предлагаемый МПГ (рис. 3.1) содержит основной редуктор 1, муфту-тормоз 2, двигательи3, ара ан 4 и полиспаст 5 (в этой части механизм выполнен по т повой схеме). Число ступеней редуктора 1, кратность полиспастаС5 другие параметры можно изменять в
зависимости от грузоподъемности Q , диапазона скоростей vг груза.
Предлагаемый механизм дополнен редуктором 6, входной вал которого муфтой 7 соединен с двигателем 8. Редуктор 6 двухпоточный: на входном (быстроходном) валу 9 закреплены шестерни 10 и 11, находящиеся в зацеплении с промежуточными («паразитными») зубчатыми колесами 12 и 13 соответственно, которые расположены на валу 14 и связаны с ним посредством встроенных обгонных муфт 19. Передача мощности через редуктор 6 (второй поток) осуществляется зацеплениями зубчатых колес 12 и 15, 13 и 16. Выходной вал 17 редуктора 6, на котором закреплены зубчатые колеса 15 и 16, соединен фрикционной электромагнитной муфтой 18 с быстроходным валом редуктора 1. В зубчатые колеса 12, 13 встроены полумуфты 19 (рис. 3.2), жестко закрепленные на валу 14, и ролики 20, замыкающие (размыкающие) кинематическую цепь в зависимости
11
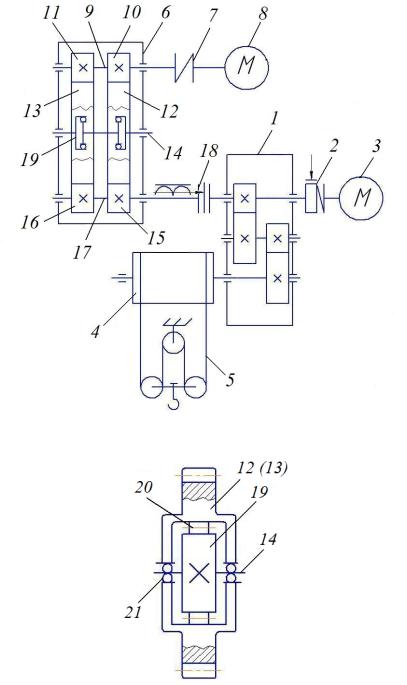
от направления вращения. При разомкнутой цепи колесо 12 или 13 вращается относительно вала 14 на подшипниках 21.
|
|
|
|
И |
|
|
|
Д |
|
|
|
А |
|
|
|
б |
|
|
|
Рис. 3.1. Кинематическая схема механизма подъема груза |
||||
и |
|
|
|
|
С |
|
|
|
|
Рис. 3.2. Схема обгонной муфты
Работает механизм следующим образом. При включении двигателя 8 напряжение подается на нормально-разомкнутую муфту 18 и на нормально-замкнутый тормоз муфты-тормоза 2, т.е. муфта 18 включается, соединяя выходной и входной валы редукторов 1 и 6;
12
тормоз 2 выключается, обеспечивая вращение валов редуктора 1. При вращении ротора двигателя 8, например по часовой стрелке, вращение передает от шестерни 10 на колесо 12 и далее по цепи, т.к. обгонная муфта, встроенная в колесо 12, включена; колесо 13 при этом вращается вхолостую, т.к. его обгонная муфта разомкнута. Поскольку муфта 18 замкнута, то вращаются валы, зубчатые колеса редуктора 1 и барабан 4. Благодаря полиспасту 5 груз перемещается,
например вверх, плавно и с минимальной заданной скоростью vг1.
Через определенный промежуток времени включают двигатель 3, при этом выключаются двигатель 8 и муфта 18. Тормоз муфты-тормоза 2 остается расторможенным. Ротор двигателя 3 перед включением вращался вхолостую, что способствует плавному увеличению
скорости vг2 подъема груза до наибольшего (номинального) значения.
Основные операции подъема – опусканияИгруза при погрузочноразгрузочных работах, включая холостые перемещения, выполняются с использованием двигателя 3, редуктора 1 и полиспаста 5. Для перемещения груза с малыми скоростями включают двигатель 8, и
На механизмы грузоподъемногоДкрана при неустановившемся движении (пуск, торможение) кроме статических нагрузок действуют
через редуктор 6 включается вся кинематическая цепь.
динамические нагрузки, вызванные вращающимися и поступательно |
|||||||
|
А |
|
|
|
|||
движущимися массами [7]. Тогда |
|
|
|
|
|
|
|
Т =Т |
с |
+Т |
пв |
+Т |
ип |
, |
|
бп |
|
|
|
||||
где Тп– пусковой момент механизма; |
Тс– статический момент (при |
||||||
и |
|
|
|
груза, |
т.е. при движении с |
||
режиме установившегося движения |
|||||||
постоянной скоростьюС); Тив – инерционный момент от вращающихся масс, приведенный к валу двигателя; Тип – инерционный момент от поступательно движущихся масс.
Слагаемые моменты можно определить по формулам
|
|
z |
F D |
|
|
bIn |
|
9,55Qv2 |
|
|
Тс = |
|
|
б к |
; |
Тив = |
|
; |
Тип = |
г |
, |
|
2u η |
9,55t |
ntη |
|||||||
|
|
|
р |
|
|
|
|
|
|
|
где zб −число ветвей каната, |
закрепленных на барабане; |
Fк −сила |
||||||||
натяжения каната; |
|
D −диаметр барабана; |
uр −передаточное число |
|||||||
редуктора (в общем случае u = u1u6 , где u1,u6 −передаточные числа редукторов 1 и 6; для определения скорости vг2 следует использовать
13
значение u6 ); η −общий КПД; I −момент инерции ротора двигателя 3 или 8 соответственно; b ≈1,2– коэффициент, учитывающий момент
инерции |
вращающихся деталей (валов, зубчатых |
колес и т.д.); |
t −время |
пуска (разгона); n −частота вращения |
вала двигателя; |
Q −масса груза; vг −скорость груза.
Для МПГ фактическое время пуска при подъеме груза рекомендуется [7] определять по формуле
t = |
|
bIn |
|
+ |
|
9,55Qvг2 |
, |
|
|
9,55(Тср −Тс) |
|
n(Тср −Тс)η |
|
|
|||
где Tср − среднее значение момента, развиваемого двигателем. |
||||||||
Достоверное значение |
Tср |
можно |
определить |
при наличии |
||||
|
|
|
|
|
|
И |
|
|
циклограммы работы МПГ. При потоке грузов, масса Q которых |
||||||||
изменяется по случайному закону, разброс значений Tср |
недопустимо |
|||||||
|
|
|
Д |
|
|
|||
велик. Но в л юбом случае система управления частотой вращения вала двигателя должна обеспечить необходимое значение времени t . Однако это нельзя рассматривать как самоцель – важно обеспечить при пуске допустимое ускорение, т.к. только это уменьшает динамическое воздействие на металлоконструкцию крана,раскачивание груза и т.д.
Двигатель МПГ вы ирают по мощности |
||||
|
А |
|||
|
Р |
= |
Qgvг |
k , |
|
3 |
|||
б |
|
10 η |
||
где g −ускорение свободного падения; k −обобщенный коэффициент, |
||||
учитывающий условияиэксплуатации (тип рабочего органа, группа |
||||
режима, способ управления и т.д.). |
||||
Для привода цепных |
наклонных конвейеров с частыми |
|||
остановками (болееС8 в смену) также необходимо обеспечить плавный
пуск. Задача сводится к уменьшению динамической составляющей общего сопротивления движению ходовой части конвейера
Fд = 60vх2.чl (q + k1qх.ч) , z12 pц
где Fд −динамическая сила; vх.ч −скорость движения ходовой части;
l −длина |
конвейера; z1 −количество |
зубьев |
приводной звездочки; |
pц −шаг |
цепи; q −погонная масса |
груза; |
qх.ч −погонная масса |
14