

Министерство образования и науки РФ Федеральное государственное бюджетное образовательное учреждение
высшего образования «Сибирский государственный автомобильно-дорожный университет
(СибАДИ)»
Ю.В. Ремизович, О.В. Абдулаева
ИННОВАЦИИ
|
|
|
|
И |
В ГРУЗОПОДЪЕМНОЙ ТЕХНИКЕ |
||||
|
|
|
Д |
|
|
|
А |
|
|
Учебное пособие |
||||
|
б |
|
|
|
и |
|
|
|
|
С |
|
|
|
|
Омск ♦ 2017
1
УДК 621.87: 621.867 ББК 39.92: 39.931
Р38
Согласно 436-ФЗ от 29.12.2010 «О защите детей от информации, причиняющей вред их здоровью и развитию» данная продукция маркировке не подлежит.
Рецензенты:
канд. техн. наук, проф. А.И. Демиденко (СибАДИ); д-р техн. наук, проф. С.В. Корнеев (ОмГТУ)
Работа утверждена редакционно-издательским советом СибАДИ в качестве
учебного пособия. |
|
Ремизович, Юрий Владимирович. |
|
Р38 Инновации в грузоподъемной технике [Электронный ресурс] |
: учебное |
пособие / Ю.В. Ремизович, О.В. Абдулаева ; кафедра «Подъемно-транспортные, |
|
тяговые машины и гидропривод». – Электрон. дан. − Омск : СибАДИ, 2017. |
|
СибАДИ |
|
– URL: http://bek.sibadi.org/cgi-bin/irbis64r plus/cgiirbis 64_ft.exe. - Режим доступа: для |
|
авторизованных пользователей. |
|
ISBN 978-5-93204-947-1. |
|
Посвящено поиску и обоснованию методов управления скоростями крановых |
|
механизмов средствами механики. |
|
Имеет интерактивное оглавление в виде закладок. |
|
Предназначено для аспирантов, обучающихся по направлению |
подготовки |
«Машиностроение».
Будет полезно студентам, о учающимся по направлениям подготовки бакалавров, магистров «Наземные транспортно-технологические комплексы», «Эксплуатация транспортно-технологических машин и комплексов» и по специальности «Наземные транспортно-технологические средства» и другим механическим специальностям вузов.
Рекомендуется также нженерно-техническим работникам, занимающимся проектированием грузоподъемных машин.
Текстовое (символьное) издание (2,0 МБ)
Системные требования : Intel, 3,4 GHz ; 150 МБ ; Windows XP/Vista/7 ;
1 ГБ свободного места на жестком диске ; программа для чтения pdf-файлов
Adobe Acrobat Reader ; Google Chrome
Редактор О.А. Соболева Издание первое. Дата подписания к использованию 10.03.2017
Издательско-полиграфический комплекс СибАДИ. 644080, г. Омск, пр. Мира, 5 РИО ИПК СибАДИ. 644080, г. Омск, ул. 2-я Поселковая, 1
© ФГБОУ ВО «СибАДИ», 2017
2
Введение
Грузоподъемная техника включает механизмы с ручным приводом (МРП) и грузоподъемные машины (ГПМ) – краны. В свете последних изменений в законодательстве о ГПМ краны получили наименование «подъемные сооружения» (ПС). Назначение кранов – подъем и перемещение грузов в пределах определенного ограниченного пространства: цех, строительная площадка и т.д. Если ограничить сферу движения грузов преимущественно перемещением по горизонтали, то к грузоподъемной технике с определенной натяжкой могут быть отнесены конвейеры: ленточные, цепные и т.д.
Предлагаемые далее инновационные решения технических задач
приложимы к кранам и конвейерам. На решения технических задач |
|
|
И |
накладывают ограничения конъюнктура рынка и собственно суть |
|
инноваций. |
Д |
Конъюнктура рынка – соотношение спроса и предложения.
Спрос будет зависеть, помимо прочего, от технического уровня грузоподъемной техники. Создавать новую технику необходимо с обеспечением высоких технических, эксплуатационных показателей, а также показателей безопасности и экологичности.
означает решение технбческ х задач на уровне изобретений с
В последнее время уделяется большое внимание вопросам
внедрения инноваций и энергос ерегающих технологий. Инновации – |
||
|
и |
Ана основе последних достижений |
это технические |
решения |
|
фундаментальной |
науки. Создание инновационных продуктов |
|
С |
|
|
соответствующей патентной защитой, т.е. патентование. Одним из направлений решения энергосбережения является изыскание способов управления скоростью рабочих движений, осуществляемых от асинхронных электродвигателей переменного тока за счет использования устройств и средств механики. В настоящее время для управления частотой вращения электродвигателей используются электротехнические приемы с воздействием на параметры питающей электросети. Все это не может не сопровождаться неэффективными затратами электроэнергии. Подобные электротехнические устройства, например частотное тиристорное регулирование с элементами электроники, требует грамотного обслуживания. Для этого необходимы специалисты соответствующей квалификации. В данном издании указан ряд инновационных разработок механического типа для обеспечения энергосбережения.
3
Одним из видов законодательства в науке и технике является использование международных стандартов (ISO) и международной системы единиц (SI). В пределах данного пособия необходимо придерживаться следующих заимствований из системы СИ (SI) и их обозначений:
Q – грузоподъемность, кг;
F – сила, Н;
G =Qg – сила тяжести, Н; L ( ) – длина, м;
t – время, с;
P – мощность, кВт;
p– давление, МПа;
σ– напряжение, МПа;
n – частота вращения, мин-1; |
|
И |
|||
|
|
||||
T |
– момент (изгибающий, вращающий), Н м. |
||||
|
|
|
|
Д |
|
При расчетах для получения правильного результата в формулы |
|||||
подставлять указанные размерности. |
|
|
|||
|
|
|
А |
|
|
|
|
б |
|
|
|
|
и |
|
|
|
|
|
С |
|
|
|
|
4
1. НОВОЕ В ЗАКОНОДАТЕЛЬСТВЕ О ГРУЗОПОДЪЕМНОЙ ТЕХНИКЕ
До 2013 г. основным документом, регламентирующимпроектирование, изготовление, монтаж и эксплуатацию грузоподъемных машин, были «Правила устройства и безопасной эксплуатации грузоподъемных кранов» [1].
12 ноября 2013 г. Федеральная служба по экологическому, технологическому и атомному надзору своим приказом № 533 отменила указанные «Правила устройства и безопасной эксплуатации грузоподъемных кранов» [1] и ввела взамен «Правила безопасности опасных производственных объектов, на которых используются
соответствие с федеральным законом от 21 июля 1997 г. №116-ФЗ
подъемные сооружения». Этим документом установлены федеральные нормы и правила (ФНП) промышленнойИ безопасности в
объектов».
«О промышленной безопасностиДопасных производственных
ФНП устанавливают требования к деятельности в области промышленной безопасности наАопасных производственных объектах (ОПО), на которых используются стационарно установленные грузоподъемные механизмыб(далее подъемные сооружения), в том числе к работникам ОПО.
Положения ФНПираспространяются на организации независимо от их организационно-правовых форм и форм собственности, которые используют ПССна терр тор Российской Федерации. ФНП в части терминов и определен й соответствуют техническому регламенту Таможенного союза ТР ТС 010/2011 «О безопасности машин и оборудования» и Техническому регламенту «О безопасности колесных транспортных средств».
Требования ФНП распространяются на следующие ПС и оборудование, используемое совместно с ПС: грузоподъемные краны всех типов, мостовые краны-штабелеры, краны-трубоукладчики, краны-манипуляторы, строительные подъемники, подъемники и вышки, электрические тали, краны-экскаваторы, предназначенные для работы с крюком (электромагнитом), сменные грузозахватные органы (крюки, грейферы, магниты) и сменные грузозахватные приспособления (траверсы, захваты, стропы), рельсовые пути (для опорных и подвесных ПС).
5
ФНП устанавливают требования к специализированным организациям, выполняющим работы по монтажу, ремонту, реконструкции и эксплуатации ПС, а также к сотрудникам специализированных организаций, причем разделяют сотрудников на работников (специалисты, имеющие высшее или среднее специальное образование) и персонал (лица рабочих профессий).
ФНП устанавливают требования: к материалам, используемым для изготовления ПС; к видам и методам сварки; оборудованию, используемому для контроля материалов и качества сварных швов; средств поверки измерительных приборов и устройств безопасности.
Количественные показатели, используемые при проектировании и эксплуатации ПС, приведены в приложениях 1–8 ФНП и в основном
соответствуют Правилам [1]. |
И |
|
|
2. УПРАВЛЕНИЕ СКОРОСТЬЮ ПОДЪЕМА ГРУЗА |
|
|
Д |
В КРАНОВОМ МЕХАНИЗМЕ (ВАР АНТ 1)
Особенностями работы крановых механизмов, в частности механизма подъема груза (МПГ), являются: изменение нагрузки в больших пределах и направлениях действия, широкий диапазон регулирования скорости при различных значениях и знаках нагрузки;
работа в повторно-кратковременном режиме при большом числе |
||
и |
|
|
включения в час; вероятностьАперегрузок; жесткое воздействие |
||
факторов окружающей среды [2]. |
|
|
С |
|
изготовляют |
Для электропр водабкрановых механизмов |
||
специализированные сер |
электрических машин: |
асинхронные |
двигатели с короткозамкнутым ротором (в том числе двух- и трехскоростные), с фазным ротором и двигатели постоянного тока. Соотношение удельных стоимостей (р./кВт) данных двигателей
1,7:1:2,2 [2].
Для управления двигателями с целью обеспечения требующегося диапазона изменения скорости используют силовые кулачковые контроллеры (КК); магнитные контроллеры (МК); системы: Г–Д; ПЧН–АД. Соотношение стоимостей указанных управляющих устройств 1:5,3:15:50 [2]. Кроме того, используют системы ТПН–АД, УВ–Д и др. Всем им в той или иной мере присущи недостатки: низкие энергетические показатели, ступенчатое регулирование скорости, высокая стоимость, необходимость квалифицированного обслуживания и т.д. [2].
6
Сравнительные показатели по массе различных типов электропривода при мощности двигателя 30 кВт составляют:
Тип кранового электропривода и управляющего устройства |
Масса, кг |
СКК………………………………………………………………………. |
480 |
СМК переменного тока………………………………………………… |
630 |
СМК переменного тока с динамическим торможением |
|
или источником встречного напряжения…………………………….. |
720 |
СМК постоянного тока…………………………………………………. |
1140 |
СМК асинхронным короткозамкнутым двигателем…………………. |
900 |
Система Г–Д…………………………………………………………….. |
1700 |
Система ПЧН–АД……………………………………………………..... |
1260 |
Масса двигателя мощностью 30 кВт составляет 315–335 кг [2].
содержит один типовой комплект, включающийИдвигатель, муфтутормоз, редуктор, рабочий орган (барабан, зубчатое колесо и др.). Для
Таким образом, за счет системы управления масса электропривода может увеличиваться в 2–5 раз.
Используют крановые механизмы двух модификаций:
механизмов раздельного типа (как правилоД, механизм передвижения крана) характерно наличие двух и более типовых комплектов.
моноблочный и раздельный. При моноблочном исполнении механизм
Несмотря на удвоенное количество комплектующих единиц,
раздельный привод в определенных условиях оказывается наиболее |
|
А |
|
дешевым. Кроме того, поочередное включение (выключение) |
|
двигателей такого механ бзма позволяет обеспечить плавное трогание |
|
(остановку), напр мер башенного крана [3], с уменьшенными по |
|
сравнению с обеспечивающимии |
системой управления динамическими |
нагрузками. |
|
КрановыеСМПГ раздельного типа (два двигателя или два барабана) не нашли широкого применения, так как решали частные задачи, например задачу порожних перемещений грузов малой массы включением одного двигателя [4].
Цель данной инновационной разработки – обосновать возможность и целесообразность исключения электротехнических систем управления, применяемых ныне в крановых механизмах, с обеспечением нужного диапазона скоростей за счет средств и приемов механики. Для достижения указанной цели предложен МПГ, кинематическая схема которого изображена на рис. 2.1.
Механизм содержит двойной комплект, включающий электродвигатель 1, муфты-тормозы 2, редукторы 3, барабаны 4 и 6, а
7
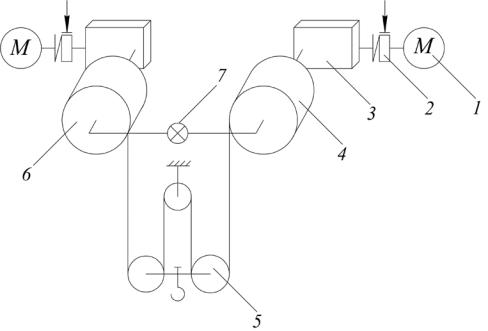
также полиспаст 5 и счетчик оборотов 7. При вращении одного из барабанов (4 или 6) полиспаст работает как одинарный; при вращении обоих барабанов – как сдвоенный.
|
|
|
И |
|
|
Д |
|
|
А |
|
|
Рис. 2.1. Кинематическая схема механизма подъема груза |
|||
Счетчик оборотов 7 |
б |
|
|
позволяет контролировать запас каната на |
|||
барабане [4]. Электродвигатель 1 – асинхронный с короткозамкнутым ротором (типа МТКF)ивы ран как наиболее дешевый, экономичный и надежный [2]. Редуктор 3 – ц л ндрический двухили трехступенчатый. Основное отличие состо т в том, что барабаны 4 и 6 имеют разные
диаметры по центрам витка каната. Допустим диаметр D4 барабана 4 больше диаметра D6 барабана 6. Скорость vк , м/с, каната,
наматываемого на барабан, зависит от диаметра D , м, и частоты |
n , |
|||||
мин |
-1 |
|
С |
|
|
б |
|
, вращения барабана [4] |
|
|
|
||
|
|
|
vк =πDnб / 60. |
|
|
|
|
Поскольку двигатели и редукторы одинаковые, то при n1 = n1′ |
и |
||||
up3 = u′p3 |
частоты вращения барабанов будут равны nб4 = nб6 |
(здесь |
||||
n1′ – частота вращения второго двигателя, |
а u′p3 – передаточное число |
|||||
второго |
редуктора). Так как D4 > D6 , |
то скорость vк1 |
каната, |
|||
наматываемого на барабан 4, будет больше скорости vк2 каната,
8
наматываемого на барабан6. Разность скоростей будет пропорциональна разности диаметров
(vк1 −vк2 ) = f (D4 − D6 ).
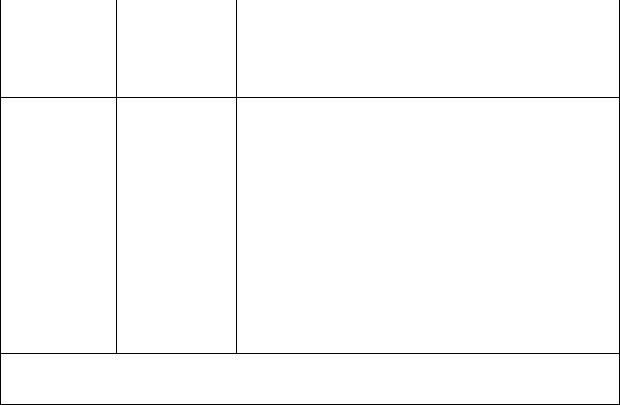
В целом скорости vг1 − vг8 груза, обеспечиваемые данным
механизмом, можно определить по формулам, приведенным в табл. 2.1 (uп − кратность полиспаста, численно неизмененная при его
работе как по одинарной, так и по сдвоенной схеме. Скорости vг3 ,
vг4 −наименьшие (посадочные); |
vг5 −vг8 −номинальные; vг1, vг2 − |
|
ускоренные (форсированные)). |
Таблица 2.1 |
|
|
|
|
|
Определение скоростей механизма подъема груза |
|
|
|
|
Позиция |
Направление |
Формула для определения |
на рисунке |
вращения |
скорости груза2 |
2.1барабана1
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
4 |
+ |
|
|
|
Д |
|
6 |
– |
|
|
|
+vг1 = (vк1 +vк2 ) / uп |
|
4 |
– |
|
|
|
–vг2 = (vк1 +vк2 ) / uп |
|
6 |
+ |
|
|
|
|
|
4 |
+ |
|
|
|
+vг3 = (vк1 −vк2 ) / uп |
|
6 |
+ |
|
|
|
|
|
4 |
– |
|
б |
–vг4 = (vк1 −vк2 ) / uп |
||
6 |
+ |
|
|
|
||
4 |
+ |
|
|
А |
+vг5 = vк1 / uп |
|
6 |
0 |
|
|
|||
4 |
– |
|
|
|
|
–vг6 = vк1 / uп |
6 |
С |
|
|
|
|
|
0 |
|
|
|
|
|
|
4 |
0 |
и |
|
|
+vг7 = vк2 / uп |
|
6 |
– |
|
|
|||
4 |
0 |
|
|
|
|
–vг8 = vк2 / uп |
6 |
+ |
|
|
|
|
|
Знак «+» – вращение по часовой стрелке, «–» – против, 0 – барабан не
вращается 2Знак «+» подъем груза, знак «–» опускание
Номинальную (паспортную) скорость груза назначают исходя из типа крана, характера груза, вида работ, группы режима и пр. [4]. Примерный скоростной режим при подъеме груза «с веса»
представлен на диаграмме (рис. 2.2). Периоды ∆ti пуска (разгона) на
каждом этапе малы (≈0,5 с) из-за жесткой естественной характеристики асинхронных двигателей. Скорость vг3 зависит только от разности диаметров барабанов и может быт ь сколь угодно малой (0,01–0,05 м/с).
9