

• Установившееся значение выходного сигнала (Steady State),
определяющее статическую точность системы и необходимое для вычисления статической ошибки системы.
Частотные характеристики системы
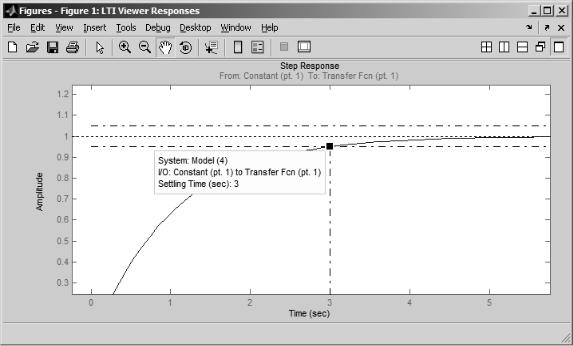
СВ пакете LTI Viewer приложения Simulink численные значения запасов устойчивости системы автоматического управления можно определ ть по ЛЧХ (логарифмические частотные характеристики ЛАХ и ЛФХ) ли АФЧХ (амплитудно-фазовая частотная характеристика).
стикДля получен я частотных характеристик в окне типа характери-
Control and Estimation Tools Manager выбирается «Bode response plot» или «Nyquist plot» для ЛАХ и ЛФХ или АФЧХ соответственно.
Также при сследовании систем с обратной связью необходимо постав ть галочкуб«Open Loop» на активной точке выхода «Output point», так как частотные характеристики строятся только для разомкнутых с стем. После чего производится запуск линеаризации и вывод тся окно LTI Viewer с полученными графиками (рис. 12 и 13).
В случае применения частотных критериев имеется два показателя устойчивости:
•запас устойчивости по амплитуде ∆L (Gain Margin), измеряемый в децибелах (дБ) и показывающий, на сколько следует сдвинуть ЛАХ вверх, чтобы система оказалась на границе устойчивости (см. рис.
12 и 13);
•запас устойчивости по фазе ∆ϕ (Phase Margin), измеряемый в градусах и показывающий, на сколько следует сдвинуть ЛФХ вниз, чтобы система оказалась на границе устойчивости (см. рис. 12 и13).
Для определения запасов устойчивости необходимо щелкнуть правой кнопкой мыши на поле графика и выбрать пункт контекстного меню Characteristics > All Stability Margins («Устойчивость в целом»)
или Minimum Stability Margins («Устойчивость в малом»). Для получения численных значений запасов устойчивости необходимо нажать курсором на выделенных точках. Кроме того, делается вывод об устойчивости замкнутой системы: Closed-loop stable? (Замкнутая система устойчива?), который может принимать два значения: Yes (Да) и No (Нет).
Таким образом, для проведения исследования модели необходимо и достаточно определить показатели качества переходного процесса, устойчивость и её запасы по частотным характеристикам, а
также сравнить их с предельными показателями устойчивости и качества, заданными для данной модели.АИ
14
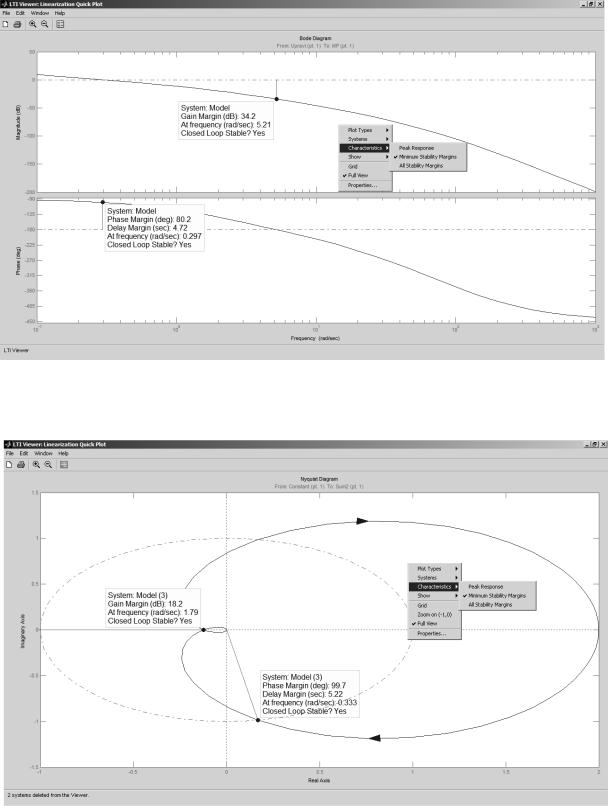
С и б Р с. 12ЛАХ. ЛФХ с запасами устойчивости
Д И
Рис. 13. АФЧХ с запасами устойчивости
15
Редактирование и сохранение полученных результатов
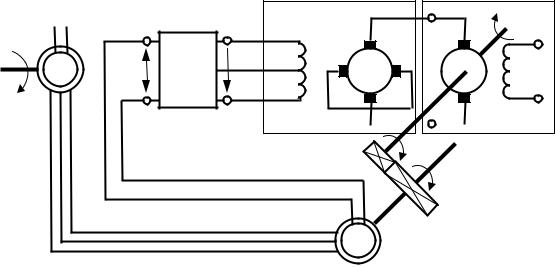
После получения нужных характеристик возникает необходимость редактирования (подпись точек и осей, выбор масштаба или изменение градуировки и т.д.) и сохранения данных. В этом случае Сследует воспользоваться командой File > Print to Figure в командном меню окна LTI Viewer. После использования данной команды появляется окно редактирования графических объектов Figure, представлен-
ное на р с. 14.
и б А
Рис. 14. ВнешнийДвид окна Figure
Данный инструмент имеет собственноеИкомандное меню и предоставляет расширенные возможности редактирования полученных графиков, а также экспорт результатов в виде растровых изображений. Также его можно использовать для построения графических зависимостей массивов данных, полученных в результате исследования модели и хранящихся в рабочей области Matlab – Workspace.
Таким образом, программный пакет Simulink является законченным программным продуктом, позволяющим производить визуальное моделирование, исследование построенных моделей и вывод результатов в числовом и графическом виде.
16
Лабораторная работа №1
ИССЛЕДОВАНИЕ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
Цель работы − изучить характеристики типовых динамических звеньев.
В теории автоматического управления можно выделить основные типовые д нам ческие звенья: звено постоянного запаздывания, идеальное ус л тельное (пропорциональное), апериодическое (инерционное), д фференц рующее, интегрирующее, колебательное.
Частотные характеристики звеньев. Если на вход динамиче- |
||
С |
|
|
ского звена поступает сигнал синусоидальной формы определенной |
||
частоты, то выходной сигнал имеет ту же синусоидальную форму и |
||
частоту, |
друг е амплитуду А и фазу ϕ. В связи с этим различают |
|
|
-частотные фазово-частотные характеристики звеньев. |
|
амплитудноАмпл -частотная характеристика (АЧХ) А(ω) выражает от- |
||
|
б |
|
ношен е ампл туды коле аний на выходе звена Авых к амплитуде коле- |
||
баний на его входе Авх в зависимости от частоты входного сигнала ω: |
||
|
А |
|
|
Α(ω) = вых / вх = f(ω). |
(1.1) |
Фазово-частотная характеристика (ФЧХ) φ(ω) выражает зависимость разности фаз между выходными и входными колебаниями зве-
на ϕ от частоты входного сигнала ω: |
|
φ = f(ω). |
(1.2) |
Опережению фазы соответствует φ > 0, а отставанию – ϕ < 0. Амплитудно-фазовую частотную характеристику (АФЧХ) W(jω)
|
И |
|
можно рассматривать как одну из форм описания динамических |
||
свойств для случая синусоидальногоДвоздействия на вход звена. Для |
||
получения W(jω) из передаточной функции W(р) необходимо p заме- |
||
нить на jω. Амплитудно-фазовая частотная характеристика объединя- |
||
ет амплитудную и фазовую частотные характеристики |
|
|
Логарифмической |
амплитудно-частотной характеристикой |
|
(ЛАХ) L = f(lgω) называют зависимость модуля частотной характери- |
||
стики от частоты, представленной в логарифмическом масштабе. |
||
|
L = 20lgA(ω). |
(1.3) |
Логарифмической |
фазово-частотной характеристикой |
(ЛФХ) |
φ = f(lgω) называют зависимость аргумента частотной характеристики от логарифма частоты.
17
Звено постоянного запаздывания
Для любого устройства, служащего для передачи информации, справедливо то, что выходная величина проявляется с некоторым за-
паздыванием на время τ относительно момента поступления информации на вход устройства. В ряде случаев это время настолько мало, что им пренебрегают и считают, что практически информация на вхо-
де и выходе возникает в один и тот же момент (τ = 0).
Звено определяется как запаздывающее, если оно описывается
уравнен ем |
|
|
С |
y(t) = x(t– τ), |
(1.4) |
. |
|
|
где τ – время |
|
|
Передаточная функция звена запаздывания |
|
|
запаздыванияW ( p) = e−pτ. |
(1.5) |
|
б |
|
|
Переходный процесс звена запаздывания (Transport Delay) рекомендуется смотреть в модуле Scope (двойной щелчок на пикто-
грамме). Для |
зучен я свойств звена запаздывания необходимо изме- |
|||||
|
ЛАХ |
|||||
нять его параметры в соответствии с табл. 1 и проследить влияние |
||||||
изменения на переходную характеристику, |
, ЛФХ и АФЧХ. |
|||||
Для изменения параметров звена необходимо сделать двойной |
||||||
щелчок левой кнопкой мыши по элементу Transport Delay в окне м о- |
||||||
дели и в открывшемся окне в поле |
Time delay (время запаздывания) |
|||||
|
|
Д |
||||
ввести значение из табл. 1. Параметр Pade order (for linearization) = 2. |
||||||
|
|
|
|
|
Таблица 1 |
|
|
Значения коэффициентов звена запаздывания |
|||||
|
|
|
|
|
|
|
№ опыта |
1 |
|
2 |
|
И |
|
|
|
3 |
|
|||
τ, с |
1 |
|
2 |
|
3 |
|
Идеальное усилительное звено
Идеальным усилительным (пропорциональным) (Gain) называют звено, у которого выходная величина в каждый момент времени пропорциональна входной величине.
Уравнение идеального усилительного звена имеет вид |
|
у = kx. |
(1.6) |
где k – коэффициент передачи звена, значения для исследования приведены в табл. 2.
18

Передаточная функция идеального усилительного звена
W ( p) = |
Y ( p) |
= k . |
(1.7) |
|
X ( p) |
||||
|
|
Таблица 2 |
||
|
|
|
С |
|
|
|
|
||
|
Значения коэффициентов идеального усилительного звена |
|||||
|
№ опыта |
1 |
|
2 |
|
3 |
|
k |
0,1 |
1 |
|
2 |
|
|
личина |
|
||||
|
|
|
Дифференцирующее звено |
|
||
Д фференц рующим называют звено, в котором выходная вепропорц ональна производной по времени от входной величины. В д фференц рующем звене выходная величина пропорцио-
При подачебна вход звена ступенчатого сигнала на выходе получается мгновенный выходной импульс, теоретически имеющий бесконечно большую амплитуду, соответствующую бесконечно большой
нальна скорости зменения входной величины.
Уравнен е д фференцирующего звена имеет вид |
|
у = k dx/dt. |
(1.8) |
скорости входного сигнала в момент подачи. Передаточная функция дифференцирующего звена
Y ( p) |
|
АW ( p) = = kp . |
(1.9) |
X ( p) |
|
Модель звена составляется в виде последовательного соедине- |
|||
ния блока Switched derivative for linearization (из раздела Linearization |
|||
библиотеки Simulink Extras) и блока Gain. Логарифмические характе- |
|||
ристики можно считать достовернымиДна интервале от ноля до часто- |
|||
ты, на два порядка меньшей, чем значение Derivative constant. Реко- |
|||
мендуется установить значение Derivative constant, равным 107, тогда |
|||
график достоверен на интервале до 105. Параметр Switch value необ- |
|||
ходимо установить равным 1 – for linearization. Значения коэффици- |
|||
ента усиления дифференцирующего звена приведеныИв табл. 3. |
|||
|
|
|
Таблица 3 |
|
Значения коэффициентов дифференцирующего звена |
||
№ опыта |
1 |
2 |
3 |
k |
0,1 |
1 |
4 |
19
Интегрирующее звено
Интегрирующим называют звено, в котором выходная величина пропорциональна интегралу по времени от входной величины. В интегрирующем звене скорость изменения выходной величины пропорциональна входной величине. Уравнение интегрирующего звена имеет вид
|
|
|
|
|
|
t |
|
|
|
|
|
|
||
|
|
|
|
y = k∫xdt . |
|
|
|
|
(1.10) |
|||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
Передаточная функция интегрирующего звена |
|
|
|||||||||||
|
ния |
Y ( p) |
|
|
k |
|
|
Таблица 4 |
||||||
С W ( p) = |
= |
. |
|
(1.11) |
||||||||||
|
|
|||||||||||||
|
|
|
|
|
|
X ( p) |
|
p |
|
|
||||
|
Модель звена составляется в виде последовательного соедине- |
|||||||||||||
|
|
б |
|
|
|
|
|
|
||||||
|
блока Integrator |
лока Gain. Значения коэффициента усиления |
||||||||||||
|
интегр рующего звена (Gain) приведены в табл. 4. |
|
|
|||||||||||
|
|
|
Значен |
я коэффициентов интегрирующего звена |
|
|
||||||||
|
|
|
Апериодическое |
|
|
|||||||||
|
№ опыта |
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
k |
|
|
0,1 |
|
|
|
1 |
|
|
|
3 |
|
|
звено
Апериодическим (инерционным) называют звено, в котором при подаче на вход ступенчатого сигнала выходная величина апериодически (по экспоненте) стремится к новому установившемуся значению.
Уравнение апериодического звена имеет вид |
|
|||||
|
|
|
|
И |
||
Tdy/dtД+ у = kx. |
(1.12) |
|||||
где Т – постоянная времени звена, характеризующая инерционность |
||||||
звена; k – коэффициент усиления звена. |
|
|
|
|
||
Передаточная функция апериодического звена |
|
|||||
W ( p) = |
Y ( p) |
= |
k |
|
. |
(1.13) |
X ( p) |
Tp +1 |
|||||
Для изменения параметров апериодического звена (Transfer Fcn) необходимо сделать двойной щелчок левой кнопкой мыши по звену в окне модели. В открывшемся окне отображены текущие параметры: в поле Numerator (числитель) значение задано одним коэффициентом (который соответствует коэффициенту усиления звена), а в поле De-
20
nominator (знаменатель) – двумя коэффициентами. По умолчанию значения всех коэффициентов блока равны единице. Второй коэффициент в поле Denominator окна параметров блока Transfer Fcn соответствует нулевой степени многочлена, находящегося в знаменателе функции, а первый – первой степени многочлена. Так как знаменатель передаточной функции апериодического звена имеет вид (Tp + 1), то второй (правый) коэффициент в поле Denominator изменять не следует. Значения коэффициентов звена изменяют в соответствии с табл. 5.
|
и |
|
|
|
|
|
|
|||
|
|
Значен |
я коэффициентов апериодического звена |
|
|
|
||||
С |
|
|
|
|
|
|
|
|
||
|
№ опыта |
|
1 |
|
2 |
|
|
3 |
|
|
|
K |
|
|
|
1 |
|
|
|
|
|
|
Т |
|
0,1 |
|
1 |
|
|
4 |
|
|
|
|
Колебательное |
|
|
|
|
|
|
||
|
|
|
(апериодическое 2-го порядка) звено |
|||||||
|
Колебательным называют звено, у которого при ступенчатом |
|||||||||
|
|
А |
|
|
|
|||||
|
изменении входной величины выходная величина стремится к новому |
|||||||||
|
установившемуся значению, совершая при этом колебания. |
|
|
|
||||||
|
Передаточная функция коле ательного звена |
|
|
|
||||||
|
|
|
1 |
|
. |
|
(1.14) |
|||
|
|
|
W ( p) = |
|
|
|||||
|
|
|
T 2 p2 +T p +1 |
|
||||||
|
|
|
|
Д |
|
|
||||
|
|
|
1 |
2 |
|
|
|
|
|
|
|
Если параметр звена ξ ≥ 1 (ξ = Т2 |
/ 2Т1), то получают апериоди- |
||||||||
|
ческое звено 2-го порядка, не имеющего колебательности. |
|
|
|
||||||
|
Для изменения параметров колебательного звена (Transfer Fcn) |
|||||||||
|
необходимо сделать двойной щелчок левой кнопкой мыши по звену в |
|||||||||
|
|
|
|
|
И |
|||||
окне модели. Поле Numerator (числитель) заполняется одним коэффициент усиления звена, а в поле Denominator (знаменатель) – тремя коэффициентами. Значения коэффициентов звена изменяют в соответствии с табл. 6 и оценивают влияние изменения на переходную характеристику, ЛАХ, ЛФХ и АФЧХ.
|
|
|
|
Таблица 6 |
|
|
Значения коэффициентов апериодического звена |
|
|
||
|
|
|
|
|
|
№ опыта |
1 |
2 |
|
3 |
|
K |
|
1 |
|
|
|
Т1 |
|
1 |
|
|
|
Т2 |
1 |
2 |
|
4 |
|
21
|
Порядок выполнения работы |
1. |
Составить в обозначениях Simulink структурную схему для |
снятия характеристик типового динамического звена. |
|
2. Получить переходные временные, ЛАХ, ЛФХ и АФЧХ сле- |
|
дующих звеньев при различных коэффициентах: |
|
• |
Звено постоянного запаздывания. |
• |
Идеальное усилительное звено. |
• |
Д фференц рующее звено. |
• |
Интегр рующее звено. |
• |
Апер од ческое звено. |
С• Колебательное звено. |
|
3. |
остав ть отчет по проделанной работе. |
шестиСодержание отсчета
Для всех сследуемых типовых динамических звеньев необход мы следующ е данные:
1. Назван е т пового звена и его условное изображение в мо-
дели (Панель инструментов модели > Edit > Copy Model To |
||
Clipboard). |
б |
|
2. |
Передаточная функция звена W(p). |
|
3. |
Переходные временные характеристики при различных ко- |
|
эффициентах звена. |
||
4. |
ЛАХ, ЛФХ приАразличных коэффициентах звена. |
|
5. |
АФЧХ при различных коэффициентах звена. |
|
Графики получаются из панелиДинструментов окна LTI Viewer > File > Print to Figure > File > Save As…
Контрольные вопросы и задания
1.Какие типовые динамические звенья исследовались в данной работе? Назовите передаточные функции данных звеньев.
2.Что такое переходная характеристика?
3.Что такое ЛАХ, ЛФХ и АФЧХ?
4.Какой вид переходного процесса соответствует каждому звену?
5.Каково влияние коэффициентов звеньев на их переходный процесс? И
22
Лабораторная работа №2
ИССЛЕДОВАНИЕ СЛЕДЯЩЕЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ
Спроизвольно зменяющееся задающее воздействие. В следящих сислируемойтемах управляющее воздействие является величиной переменной, и математ ческое оп сан е его во времени не может быть установлено, так как сточн ком с гнала служит внешнее явление, закон изменения которого заранее неизвестен. Такая система отличается от автоматическойбс стемы регулирования тем, что вместо задатчика регу-
Цель работы − исследовать математическую модель следящей
автоматической системы управления на сельсинной паре.
ледящая автоматическая система – это система автоматиче-
ского управлен я, в которой управляемая величина воспроизводит
вел ч ны в ней размещено устройство слежения за изменениями внешн х воздействий.
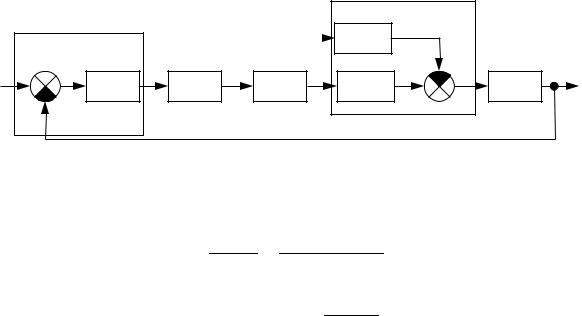
Устройство с стемы. Следящая автоматическая система (рис. 15) предназначена для воспроизведения на объекте управляющего сигнала g в виде угла поворота, поступающего на командную ось КО. Она состоит из сельсинной пары TX и TR, работающей в трансформаторном режиме; фазочувствительного магнитного усилителя МУ; электромашинного усилителя ЭМУ с поперечным полем и обмотками
управления ОУ1 |
и ОУ2; исполнительного электродвигателя постоян- |
|||||||
|
|
|
А |
|
||||
ного тока ИД с независимой обмоткой возбуждения ОВ ; механиче- |
||||||||
ской передачи МП и исполнительной оси ИО. |
|
|
||||||
|
~ |
|
|
|
ЭМУ |
|
Es |
МС |
|
|
|
|
|
|
|
|
|
КО |
|
|
|
|
Д |
|||
TX |
~U1 |
МУ |
|
ОУ1 |
|
|
ОВД |
|
g |
U2 |
ОУ2 |
|
|
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
θ |
О |
|
|
|
|
|
|
И1 |
||
|
|
|
|
|
|
МП |
|
θ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TR |
|
|
|
Рис. 15. Функциональная схема следящей автоматической системы |
|||||||
23
Принцип работы системы. Если командная ось ротора сельси- |
||||||||||||||||||||||
на датчика TX поворачивается на некоторый угол g, то происходит |
||||||||||||||||||||||
рассогласование углов поворота роторов сельсинов TX и TR, так как |
||||||||||||||||||||||
вал ротора сельсина приёмника TR неподвижен. Отрицательная об- |
||||||||||||||||||||||
ратная связь реализована за счёт соединения обмоток статоров сель- |
||||||||||||||||||||||
синов и их работы в трансформаторном режиме. Угол рассогласова- |
||||||||||||||||||||||
ния ε преобразуется в пропорциональный сигнал переменного напря- |
||||||||||||||||||||||
жения U1 |
на фазной обмотке ротора сельсина приёмника. Вслед за |
|||||||||||||||||||||
этим появляется постоянное напряжение U2 |
на выходе МУ и ЭДС ES |
|||||||||||||||||||||
на продольных щетках ЭМУ, которые соединены с якорем исполни- |
||||||||||||||||||||||
тельного электродв гателя постоянного тока ИД. В якоре появляется |
||||||||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ток, |
вал |
ИД нач нает вращаться, изменяя свой угол θ1. Вместе с ним |
||||||||||||||||||||
через механ ческую передачу изменяется угол поворота объекта |
||||||||||||||||||||||
управлен я ОУ θ2. Механическая передача МП устроена так, что угол |
||||||||||||||||||||||
поворота ротора сельс на приемника равен углу поворота объекта θ2. |
||||||||||||||||||||||
Когда |
сполн |
тельная ось повернется на такой же угол, |
как и ко- |
|||||||||||||||||||
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
мандная, углы поворота роторов сельсинов g и θ2 станут равными, ис- |
||||||||||||||||||||||
чезнет угол рассогласования ε, и, следовательно, исчезнет напряже- |
||||||||||||||||||||||
ние U1, а за ним исчезнут и последующие сигналы. Тогда двигатель |
||||||||||||||||||||||
остановитсяб, переходный процесс завершится, и следящая автомати- |
||||||||||||||||||||||
ческая система перейдет в новый установившийся режим. В качестве |
||||||||||||||||||||||
возмущающего воздействия на систему выступает момент сопротив- |
||||||||||||||||||||||
ления на валу исполнительного электродвигателя MС. Структурная |
||||||||||||||||||||||
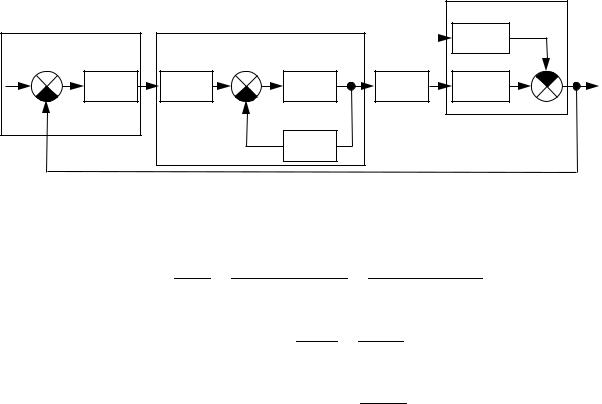
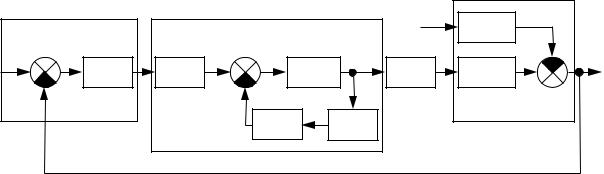
схема модели следящей системы изображена на рис. 16. |
|
|
||||||||||||||||||||
|
|
|
|
|
|
А |
|
|
|
|||||||||||||
|
|
|
TX-TR |
|
|
|
|
|
|
|
MС |
|
W''4(p) |
θ''1 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
|
|
|||||
g |
|
ε |
|
|
U |
1 |
|
U |
2 |
|
|
E |
s |
|
|
|
θ |
θ |
|
θ |
||
|
|
|
W |
(p) |
|
W (p) |
|
|
W (p) |
|
W' |
(p) |
|
'1 |
1 |
W (p) |
2 |
|||||
|
– |
|
1 |
|
|
|
2 |
|
|
|
Д3 4 5 |
|
||||||||||
|
θ2 |
|
|
|
|
МУ |
|
|
|
ЭМУ |
|
|
|
|
|
|
|
|
МП |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 16. Структурная схема модели следящей автоматической системы |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
||||||
Передаточные функции звеньев следящей системы: |
|
|
||||||||||||||||||||
TX-TR: |
|
|
|
W |
(p)= U1 |
(p) |
= |
|
U1(p) |
|
|
= k ; |
|
|
(2.1) |
|||||||
|
|
|
|
|
1 |
|
ε(p) |
|
g(p)−θ2 (p) |
|
1 |
|
|
|
||||||||
МУ: |
|
|
|
|
|
|
W (p)= U2 (p)= |
|
k2 |
|
; |
|
|
|
|
(2.2) |
||||||
|
|
|
|
|
|
|
2 |
|
|
U1(p) |
|
T1 p + |
1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
24 |
|
|
|
|
|
|
|
|
|
|

|
ЭМУ: |
W |
|
(p)= |
ES |
(p) |
|
= |
|
|
|
|
k3 |
|
; |
|
|
|
|
|
|
(2.3) |
|
||||||||||||
|
|
|
(p) |
|
(T2 p +1)(T3 p +1) |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
3 |
|
|
|
U 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ИД по каналу управления: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
W'4 (p)= |
θ'1(p) |
= |
|
|
|
|
|
k'4 |
|
; |
|
|
|
|
(2.4) |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
С |
|
|
|
|
ES (p) |
|
|
|
(T4T5 p2 +T4 p +1)p |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
ИД по каналу возмущения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
W''4 |
(p)= |
|
|
θ''1(p) |
|
= |
|
|
k''4 (T5 p +1) |
|
|
|
; |
|
|
|
(2.5) |
|
|||||||||||||||
|
|
|
MС (p) |
|
(T4T5 p2 +T4 p +1)p |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
угол поворота ИД: |
|
θ1(p)= θ'1(p)−θ''1(p); |
|
|
|
|
|
|
|
(2.6) |
|
|||||||||||||||||||||||
|
МП: |
|
|
|
W (p)= |
θ2 |
(p) |
= k |
|
, |
|
|
|
|
|
|
|
|
|
(2.7) |
|
||||||||||||||
|
|
б |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
5 |
|
|
|
|
|
|
θ |
(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гдеиki – коэфф ц енты передачи; Ti – постоянные времени; ε – угол |
||||||||||||||||||||||||||||||||||
|
рассогласования; U1 |
|
– входной сигнал МУ; U2 – напряжение на об- |
||||||||||||||||||||||||||||||||
|
мотках управлен я |
ОУ1 |
и ОУ2 |
электромашинного усилителя ЭМУ; |
|||||||||||||||||||||||||||||||
|
|
|
А |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
ES – ЭДС на продольных щетках |
|
ЭМУ; θ1 |
|
– угол поворота вала ИД; |
||||||||||||||||||||||||||||||
|
θ2 – угол поворота ротора сельсина приемника; МС – момент сопро- |
||||||||||||||||||||||||||||||||||
|
тивления на валу ИД. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Численные значения параметров передаточных функций: |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|||||||||||||||||||
|
k1 = 0,5 B/град; k2 (см. табл. 7); k3 |
|
= 20; k |
′4 = 60 град/(B c); |
k ′′4 |
= 20 |
|
||||||||||||||||||||||||||||
|
град/(Н м c); k5 = 0,005; T1 = 0,001 с; T2 = 0,01 с; T3 = 0,05 с; T4 = 0,52 с; |
||||||||||||||||||||||||||||||||||
|
T5 = 0,01 c. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 7 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|||||||||||
|
|
Значения исследуемых параметров |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Варьируемый параметр k2 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
0,1 |
|
|
|
|
|
0,3 |
|
0,5 |
|
|
0,7 |
|
|
1 |
|
|
|
3 |
|
5 |
7 |
|
|||
|
Исследуемые показатели замкнутой системы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
Время регулирования tР, с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Перерегулирование σ, % |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Исследуемые показатели разомкнутой системы
Запас по амплитуде ∆L, дБ
Запас по фазе ∆ϕ, °
25
Порядок выполнения работы
1.Составить в обозначениях Simulink структурную схему модели следящей автоматической системы (рис. 16).
2.Получить переходную временную характеристику замкнутой
линеаризованной системы по каналу управления при воздействии Сg = 1(t) и начальном значении коэффициента k2 = 0,1. По виду характеристики оценить устойчивость системы и получить численные значения показателей качества регулирования tР и σ. Занести результаты
в табл. 7.
линеар3. Получ ть переходную временную характеристику замкнутой
линеар зованной с стемы по каналу возмущения при воздействии
МC = 1(t) начальном значении коэффициента k2 = 0,1. По виду характер ст к оцен ть устойчивость системы и получить численные значен я показателей качества регулирования tР и σ.
совместнойбподаче управляющего g = 1(t) и возмущающего МC = 1(t)
4. Получ ть переходную временную характеристику замкнутой зованной с стемы по каналу управления и возмущения при
воздействий начальном значении коэффициента k = 0,1. Управ- g t АМ t 2
ляющее = 1( ) и возмущающее C = 1( ) воздействия совместно задавать в структурной схеме из одного источника сигнала Constant. По виду характеристики оценить устойчивость системы и получить численные значения показателей качества регулирования tР и σ.
ифазе ∆ϕ. Занести результаты в таблД. 7.
6.Получить АФЧХ разомкнутой линеаризованной системы по каналу управления при начальном значении коэффициентаИk2 = 0,1. По критерию Найквиста оценить устойчивость системы и получить чис-5. Получить ЛАХ и ЛФХ разомкнутой линеаризованной системы
∆L = f(k2); ∆ϕ = f(k2).
26
|
Содержание отчета |
1. |
Функциональная схема следящей автоматической системы. |
2. |
труктурная схема модели следящей автоматической системы. |
3. |
труктурная схема модели следящей автоматической систе- |
мы в обозначениях Simulink. |
|
4. |
Переходная временная характеристика замкнутой линеаризо- |
ванной системы по каналу управления при k2 = 0,1 с численными значениями показателей качества регулирования.
5. |
Переходная временная характеристика замкнутой линеаризо- |
чени |
|
ванной с стемы по каналу возмущения при k2 = 0,1 с численными зна- |
|
Сями показателей качества регулирования. |
|
6. |
Переходная временная характеристика замкнутой линеаризо- |
ванной с стемы по каналу управления и возмущения при k2 = 0,1 с численными значениями показателей качества регулирования.
7. ЛАХ ЛФХ разомкнутой линеаризованной системы по каналу управлен я при k2 = 0,1 с численными значениями запасов устойчиво-
сти по ампл туде ∆L |
фазе ∆ϕ. |
|
А |
8. АФЧХ разомкнутой линеаризованной системы по каналу |
|
управлениябпри k2 = 0,1 с численными значениями запасов устойчиво- |
|
сти по амплитуде ∆L |
и фазе ∆ϕ. |
9. Графики характеристик tР = f(k2); σ = f(k2); ∆L = f(k2); ∆ϕ = f(k2).
Контрольные вопросы и задания
1.Дать формулировку следящей автоматической системы.
2.Объяснить устройство и принцип работы следящей автоматической системы управления по рис. 15.
3.Что является в данной следящей системе управляющим и возмущающим воздействиями?
4.Что такое переходная временная характеристика системы?
5.Что такое передаточная функция звена?
6.Что такое разомкнутая автоматическая система? При решении каких задач используется разомкнутая система?
7.Каким звеном описывается магнитный усилитель в системе?
8.Что такое АЧХ, ФЧХ, ЛАХ, ЛФХ, АФЧХ, как они строятся?
9.В чем суть логарифмического критерия устойчивости?ДИ
10. Проанализировать полученные характеристики tР = f(k2);
σ = f(k2); ∆L = f(k2); ∆ϕ = f(k2).
27
|
|
|
|
Лабораторная работа №3 |
|
|
|||
ИССЛЕДОВАНИЕ АВТОМАТИЧЕСКОЙСИСТЕМЫ |
|||||||||
ТАБИЛИЗАЦИИ УГЛОВОЙ СКОРОСТИ ТУРБОГЕНЕРАТОРА |
|||||||||
Цель работы − исследовать математическую модель автомати- |
|||||||||
ческой системы стабилизации угловой скорости турбогенератора. |
|||||||||
Турбогенератор – устройство, состоящее из синхронного гене- |
|||||||||
ратора |
паровой |
ли газовой турбины, выполняющей роль привода. |
|||||||
Основная функц я в преобразовании внутренней энергии пара в элек- |
|||||||||
трическую, посредством вращения паровой или газовой турбины ге- |
|||||||||
Снератора. корость вращения вала турбины определяется параметра- |
|||||||||
ми используемого генератора и требуемой частотой напряжения сети. |
|||||||||
Устройство |
стемы. |
Автоматическая |
система |
стабилизации |
|||||
(рис. 17) предназначена для поддержания постоянного значения угло- |
|||||||||
вой |
|
|
вращен я тур ины синхронного генератора. В систему |
||||||
скорости |
|
|
|
GS – синхрон- |
|||||
входят: Т – |
на, являющаяся объектом управления; |
||||||||
ный генератор, пр вод мый во вращение турбиной; МП – механическая |
|||||||||
передача; ЦБМ – центро ежный маятник; ГСП – гидравлический серво- |
|||||||||
привод, состоящий из гидроусилителя ГУ, гидроцилиндра ГЦ и рычага |
|||||||||
ГСП; ПВК |
|
турб |
|
|
|
||||
– паровпускной клапан с регулятором расхода пара. |
|||||||||
ГСП |
|
Рычаг ГСП |
|
F |
ЦБМ |
F |
|||
|
s |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
m |
А |
|
|
||||
|
|
|
|
l2 |
|
l1 |
z |
|
3 ~ |
|
|
|
|
|
|
ω |
|
|
МС |
|
ГЦ |
|
|
ГУ |
|
|
|
|
|
|
|
|
|
|
Т |
|
GS |
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
ДМП |
|||
|
|
|
|
|
|
|
|
|
ω |
Пар |
|
m |
|
|
|
P |
|
– |
|
|
|
|
|
И |
|||||
|
|
|
ПВК |
|
|
||||
|
|
|
|
|
|
||||
Рис. 17. Функциональная схема автоматической системы стабилизации |
|||||||||
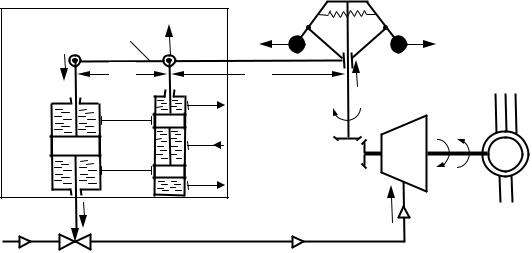
Принцип работы системы. ЦБМ (регулятор Ватта) в системе выполняет функции преобразователя, воспринимающего текущую угловую скорость турбины, задатчика угловой скорости и элемента сравнения, вычисляющего сигнал рассогласования текущей и задан-
28
ной угловой скоростей ε и преобразующего его в перемещение муфты |
||||||||||||||||||||||||
z. Если нагрузка на генератор уменьшится, то уменьшится момент со- |
||||||||||||||||||||||||
противления на валу турбины MС, следовательно фактическая угловая |
||||||||||||||||||||||||
скорость турбины ω возрастет. Грузы ЦМБ под действием возросшей |
||||||||||||||||||||||||
центробежной силы F разойдутся, и под действием внутренних тяг |
||||||||||||||||||||||||
муфта ЦМБ переместится вверх. Пропорционально перемещению |
||||||||||||||||||||||||
муфты z под действием рычага ГСП золотник ГУ переместится на ве- |
||||||||||||||||||||||||
личину s |
пр откроет доступ рабочей жидкости в верхнюю полость |
|||||||||||||||||||||||
гидроц л ндра ГЦ. Поршень и шток ГЦ начнут перемещаться вниз на |
||||||||||||||||||||||||
величину m |
пр крывать ПВК, |
который, |
в свою очередь, уменьшит |
|||||||||||||||||||||
давлен |
е пара Р на входе в турбину, вследствие чего угловая скорость |
|||||||||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
турбины |
ω уменьш тся и сигнал рассогласования ε будет стремиться |
|||||||||||||||||||||||
нулю. Одновременно из-за наличия жесткой отрицательной обрат- |
||||||||||||||||||||||||
ной связи – рычага, связывающего ГЦ и ГУ, перемещение вниз штока |
||||||||||||||||||||||||
ГЦ m повлечет за со ой о ратное перемещение золотника ГУ s, за- |
||||||||||||||||||||||||
крытиеего окон прекращение движения штока ГЦ. Таким образом, |
||||||||||||||||||||||||
давлен |
е пара Р на входе в тур ину стабилизируется еще до того, как |
|||||||||||||||||||||||
сработает канал основной отрицательной обратной связи. Знаки пере- |
||||||||||||||||||||||||
мещений z, s, m и P зависят от знака сигнала рассогласования ε. Струк- |
||||||||||||||||||||||||
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
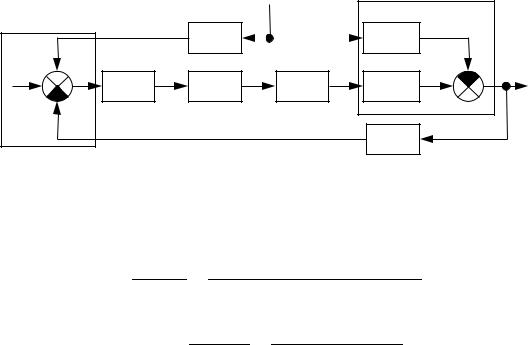
турная схема модели системы ста илизации изображена на рис. 18. |
||||||||||||||||||||||||
|
|
|
ЦБМ |
|
|
|
|
|
|
|
ГСП |
|
|
MС |
|
|
|
W''6(p) ω'' |
Т |
|||||
ω |
ε |
|
|
z |
Аs' s m P |
|
|
|
ω' |
– ω |
||||||||||||||
зад |
|
W1(p) |
|
W2(p) |
|
|
|
|
|
W4(p) |
|
|
|
W5(p) |
|
|
|
|
W'6(p) |
|
|
|||
– |
|
|
|
|
– |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ПВК |
|
|
|
|
|
|
|
|
||||
|
ω |
|
|
|
|
|
s'' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
W3(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|||||||||||||
Рис. 18. Структурная схема модели автоматической системы стабилизации |
||||||||||||||||||||||||
Передаточные функции звеньев системы стабилизации: |
|
|||||||||||||||||||||||
ЦБМ: |
|
|
W (p)= z(p) |
= |
|
|
|
z(p) |
|
= |
|
k1 |
|
|
|
|
|
; |
|
(3.1) |
||||
|
|
|
1 |
|
ε(p) |
|
ωзад(p)−ω(p) |
|
|
2И2 |
||||||||||||||
|
|
|
|
|
|
|
|
T1 p |
+T2 p +1 |
|
|
|
||||||||||||
плечо рычага ЦБМ – ГУ: |
|
W |
|
(p)= s'(p) |
= |
|
l2 |
= k |
2 |
; |
|
|
|
(3.2) |
||||||||||
|
|
|
|
|
|
|
2 |
|
|
z(p) |
|
|
l1 +l2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
плечо рычага ГЦ – ГУ: |
W |
(p)= s''(p) |
= |
|
l1 |
= k |
3 |
; |
|
|
|
(3.3) |
||||||||||||
|
|
|
|
|
|
|
3 |
|
|
|
m(p) |
|
|
l1 +l2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
29 |
|
|
|
|
|
|
|
|
|
|
|
|
|
перемещение золотника ГУ: |
s( p) = s'( p) − s''( p); |
(3.4) |
|||||||||||||||||||
ГУ-ГЦ: |
|
W |
(p)= |
m(p) |
|
= k4 ; |
|
|
|
|
|
(3.5) |
|||||||||
|
s(p) |
|
|
|
|
|
|||||||||||||||
|
|
|
4 |
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ПВК: |
|
W |
(p)= |
P( p) |
= |
|
|
|
|
k5 |
|
; |
|
|
(3.6) |
||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
5 |
|
|
|
m(p) |
|
T5 p +1 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
турбина |
по каналу управления: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
С |
W'6 |
(p)= |
ω'(p)= |
|
|
|
k'6 |
|
|
; |
|
(3.7) |
|||||||||
T6 p +1 |
|
||||||||||||||||||||
|
|
|
|
P(p) |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
турбина по каналу возмущения: |
ω''(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
W''6 |
(p)= |
|
= |
|
k''6 |
|
|
|
|
; |
(3.8) |
||||||||
|
|
|
MС (p) |
T6 p +1 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
угловая скорость |
|
тур ины: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
вращения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
ω( p) = ω'( p) −ω"( p), |
|
|
|
|
|
(3.9) |
|||||||||||||
где ki – коэффициентыбпередачи; Ti – постоянные времени; s′ – перемещение золотника ГУ от ЦБМ; s′ – перемещение золотника ГУ от ГЦ; s – суммарное перемещение золотника ГУ; ω – текущая угловая
скорость вращения тур ины; ωзад – заданная угловая скорость враще- |
||||||||||
ния турбины. |
|
|
|
|
|
|
|
|
|
|
Численные значенияАпараметров передаточных функций: k1 = 10–4 |
||||||||||
м∙с/рад; l1 (см. табл. 8); l2 = 0,2 м; k4 |
= 2 с-1; k5 = 8∙104 Па/м; k ′6 = 1,5 |
|||||||||
рад/(с∙Па); k′′6 = 0,1 рад/(с∙Н∙м); T1 = 0,1 с; T2 = 0,2 с; T5 = 5 с; T6 = 0,3 с. |
||||||||||
|
|
|
|
|
И |
|||||
|
|
|
|
|
|
|
|
Таблица 8 |
||
Значения исследуемыхДпараметров |
|
|
||||||||
|
|
Варьируемый параметр l1, м |
|
|
||||||
|
0,8 |
0,7 |
|
0,6 |
0,5 |
0,4 |
0,3 |
0,2 |
0,1 |
|
Исследуемые показатели замкнутой системы |
|
|
|
|
|
|
||||
Время регулирования tР, с |
|
|
|
|
|
|
|
|
|
|
Перерегулирование σ, % |
|
|
|
|
|
|
|
|
|
|
Статическая ошибка СТ, рад/с |
|
|
|
|
|
|
|
|
|
|
Исследуемые показатели разомкнутой системы |
|
|
|
|
|
|
||||
Запас по амплитуде ∆L, дБ |
|
|
|
|
|
|
|
|
|
|
Запас по фазе ∆ϕ, ° |
|
|
|
|
|
|
|
|
|
|
30
Порядок выполнения работы
1. Составить в обозначениях Simulink структурную схему модели автоматической системы стабилизации (рис. 18).
2. Получить переходную временную характеристику замкнутой |
||
линеаризованной системы по каналу управления при воздействии |
||
С |
|
|
ωзад = 1(t) и начальном значении параметра l1 = 0,8. По виду характе- |
||
ристики оценить устойчивость системы и получить численные значе- |
||
ния показателей качества регулирования tР, |
σ и |
СТ. Занести результа- |
ты в табл. 8. |
|
|
3. Получ ть переходную временную характеристику замкнутой |
||
линеар зованной с стемы по каналу возмущения при воздействии |
||
МC = 1(t) начальном значении параметра l1 |
= 0,8. По виду характери- |
|
стик оцен ть устойч вость системы и получить численные значения |
||
показателей качества регулирования tР, σ и |
СТ. |
|
4. Получ ть переходную временную характеристику замкнутой |
||
линеарзованной с стемы по каналу управления и возмущения при со- |
||
вместной подаче управляющего ωзад = 1(t) и возмущающего МC = 1(t) |
||
воздейств й начальном значении параметра l1 |
= 0,8. Управляющее |
|
А |
||
ωзад = 1(t) и возмущающее МC = 1(t) воздействия совместно задавать в |
||
структурнойбсхеме из одного источника сигнала Constant. По виду ха- |
||
рактеристики оценить устойчивость системы и получить численные
значения показателей качества регулирования tР, σ и |
СТ. |
5. Получить ЛАХ и ЛФХ разомкнутой линеаризованной системы |
|
по каналу управления при начальномДзначении параметра l1 = 0,8. По логарифмическому критерию оценить устойчивость системы и полу-
чить численные значения запасов устойчивости по амплитуде ∆L и
фазе ∆ϕ. Занести результаты в табл. 8.
6. Получить АФЧХ разомкнутой линеаризованной системы по каналу управления при начальном значении параметра l1 = 0,8. По критерию Найквиста оценить устойчивость системы и получить числен-
ные значения запасов устойчивости по амплитуде ∆L и фазе ∆ϕ.
7. Провести исследование системы по каналу управления,
варьируя значения параметра l1 |
согласно табл. 8. Построить графики |
характеристик tР = f(l1); σ = f(l1); |
СТ = f(l1); ∆LИ= f(l1); ∆ϕ = f(l1). |
Содержание отчета
1.Функциональная схема автоматической системы стабилизации.
2.Структурная схема модели автоматической системы стабилизации угловой скорости турбогенератора.
31
3. Структурная схема модели системы стабилизации угловой скорости турбогенератора в обозначениях Simulink.
4. Переходная временная характеристика замкнутой линеаризованной системы по каналу управления при l1 = 0,8 с численными значениями показателей качества регулирования.
5. |
Переходная временная характеристика замкнутой линеаризо- |
С |
|
ванной системы по каналу возмущения при l1 = 0,8 с численными зна- |
|
чениями показателей качества регулирования. |
|
6. |
Переходная временная характеристика замкнутой линеаризо- |
ванной с стемы по каналу управления и возмущения при l1 = 0,8 с численными значениями показателей качества регулирования.
7. ЛАХ ЛФХ разомкнутой линеаризованной системы по каналу управлен я при l1 = 0,8 с численными значениями запасов устойчиво-
по ампл туде ∆L фазе ∆ϕ.
8. |
АФЧХ разомкнутой линеаризованной системы по каналу |
||
управлен я при l1 |
= 0,8 с численными значениями запасов устойчиво- |
||
стипо ампл туде ∆L фазе ∆ϕ. |
|||
9. |
Граф ки характеристик tР = f(l1); σ = f(l1); СТ = f(l1); ∆L = f(l1); |
||
∆ϕ = f(l1). |
б |
||
|
|
||
|
|
|
Контрольные вопросы и задания |
|
|
|
А |
1.Объяснить устройство и принцип работы автоматической системы стабилизации угловой скорости по рис. 17.
2.Объяснить принцип управления по отклонению.
3.Что такое жесткая отрицательная обратная связь? Принцип её работы на схемах рис. 17 и 18.
4.В каком случае отрицательная обратная связь является основной, а в каком случае – местной?
5.Что такое переходная временная характеристика системы?
6.Какими показателями характеризуется качество регулирования автоматической системы?
7.Как влияет увеличение МС на ω?
8.Каков физический смысл запасов устойчивости по амплитуде и фазе?
9.Показать на ЛАХ, ЛФХ, АФЧХ значения запасов устойчивости по амплитуде и фазе.
10.Сформулировать критерий Найквиста.И
11. Проанализировать полученные характеристики tР = f(l1);
σ = f(l1); СТ = f(l1); ∆L = f(l1); ∆ϕ = f(l1).
32

|
|
|
Лабораторная работа №4 |
|
|
|
|||
ИССЛЕДОВАНИЕ АВТОМАТИЧЕСКОЙ СИСТЕМЫ |
|
||||||||
|
|
СТАБИЛИЗАЦИИ НАПРЯЖЕНИЯ |
|
|
|||||
|
|
СИНХРОННОГО ГЕНЕРАТОРА |
|
|
|||||
Цель работы − исследовать математическую модель автомати- |
|||||||||
ческой системы стабилизации напряжения синхронного генератора. |
|||||||||
|
стемы возбуждения относятся к числу наиболее ответствен- |
||||||||
ных элементов с нхронного генератора. Самым надежным способом |
|||||||||
создан |
я основного магнитного потока синхронного генератора явля- |
||||||||
Сется незав с мое электромагнитное возбуждение. Электромашинная |
|||||||||
система возбужден |
, где воз удителем является генератор постоян- |
||||||||
ного тока, якорь которого находился на одном валу с генератором, на- |
|||||||||
зывается прямой. Регул рование напряжения возбудителя и, следова- |
|||||||||
тельно, тока воз |
|
основного генератора осуществляется пу- |
|||||||
уждения |
на обмотке возбуждения возбуди- |
||||||||
тем изменен я напряжения (тока) |
|||||||||
теля с помощью электромашинного усилителя. |
|
|
|
|
|||||
Устройство системы. На рис. 19 изображена функциональная |
|||||||||
схема системы автоматической стабилизации напряжения синхронно- |
|||||||||
|
|
б |
|
|
|
|
|||
го генератора. Здесь GS – синхронный генератор с обмоткой возбуж- |
|||||||||
дения ОВГ; В – воз удитель – генератор постоянного тока с незави- |
|||||||||
симой обмоткой возбуждения ОВВ; ПВ – подвозбудитель – электро- |
|||||||||
машинный усилитель ЭМУ с поперечным полем и обмотками управ- |
|||||||||
ления ОУ1 |
|
А |
|
|
|
||||
и ОУ2; ТН и ТТ – измерительные трансформаторы напря- |
|||||||||
жения и тока; ВП1 и ВП2 – выпрямители; РН – регулятор напряжения |
|||||||||
с задающим потенциометром П; ЭУ – электронный усилитель. |
|
||||||||
|
|
|
|
|
ВП1 |
|
|
~UГ |
|
|
|
|
|
Д |
|
||||
|
|
|
|
|
|
|
ТН |
IГ |
|
|
|
|
|
|
|
|
|
ТТ |
|
РН |
UН |
UТ |
|
|
ВП2 |
|
|
GS |
|
|
|
|
|
|
|
|
|||
|
|
|
|
ПВ |
И |
||||
+ П |
|
|
|
ЭМУ |
+ |
В |
+ |
|
|
|
|
|
UУ ОУ1 |
|
|
||||
|
|
ε |
ЭУ |
|
UВВ |
|
ОВГ |
||
|
UЗАД |
ОУ2 |
|
|
|||||
|
|
|
|
|
ОВВ |
|
IВГ |
||
– |
|
|
|
|
|
– |
– |
|
|
Рис. 19. Функциональная схема автоматической системы стабилизации |
|||||||||
33
Принцип работы системы. В основе автоматической системы |
|||||||||||||
лежит комбинированный принцип управления. Контур токового ком- |
|||||||||||||
паудирования предназначен для коррекции возбуждения генератора с |
|||||||||||||
целью компенсации падения напряжения при увеличении тока стато- |
|||||||||||||
ра IГ. Если токовая нагрузка на генератор увеличивается, то за счет |
|||||||||||||
падения напряжения на внутреннем сопротивлении статорной обмот- |
|||||||||||||
ки U0 уменьшается напряжение на выходе генератора UГ. Помимо |
|||||||||||||
главной отрицательной обратной связи, передающей на регулятор из- |
|||||||||||||
меренное значен |
е напряжения генератора UН, на вход регулятора по |
||||||||||||
каналу компенсац |
возмущения поступает измеренное значение тока |
||||||||||||
генератора в в де напряжения UТ. Каналы измерения тока и напряже- |
|||||||||||||
ния генератора выполнены с помощью измерительных трансформа- |
|||||||||||||
С |
|
|
|
|
и ВП2. Регулятор напряжения РН |
||||||||
торов ТН |
ТТ |
выпрямителей ВП1 |
|||||||||||
|
с гналы о ратной связи с заданным значением напряже- |
||||||||||||
ния генератора UЗАД |
, с учетом коррекции UТ, вырабатывает сигнал |
||||||||||||
рассогласования в в де напряжения ε. Напряжение рассогласования ε |
|||||||||||||
сравнивает |
|
|
|
|
|
|
|
||||||
преобразуется с помощью электронного усилителя ЭУ в пропорцио- |
|||||||||||||
нальный с гнал постоянного напряжения UУ |
на обмотках управления |
||||||||||||
ЭМУ. На продольных щетках ЭМУ, которые соединены с обмоткой |
|||||||||||||
возбуждения |
удителя, появляется напряжение возбуждения UВВ. |
||||||||||||
В якоре возбудителяпоявляется ЭДС, и, соответственно, ток возбуж- |
|||||||||||||
дения IВГ |
в обмотке воз уждения генератора ОВГ. Структурная схема |
||||||||||||
модели системы ста илизации изображена на рис. 20. |
|
|
|
||||||||||
|
|
|
|
ТТ-ВП2 |
|
|
|
|
|
GS |
|
||
|
|
|
АIГ |
|
U0 |
|
|
||||||
РН |
UТ |
|
|
W5(p) |
|
|
W''4(p) |
|
|
||||
|
|
|
|
|
|
|
|
|
– |
|
|||
UЗАД |
ε |
W1(p) UУ |
W2(p) |
UВВ |
W3(p) IВГ |
W'4(p) |
EГ |
UГ |
|||||
|
|||||||||||||
|
– |
ЭУ |
|
ПВ |
|
В |
|
|
|
|
|
||
|
UН |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Д |
|
|||||||
|
|
|
|
|
|
|
|
W6(p) |
|
|
|
||
|
|
|
|
|
|
|
|
ТН-ВП1 |
|
|
|
||
Рис. 20. Структурная схема модели автоматической системы стабилизации |
|||||||||||||
Передаточные функции звеньев системыИстабилизации: |
|||||||||||||
ЭУ: |
W (p)= UУ (p) |
= |
|
|
U1(p) |
|
|
= k ; |
|
(4.1) |
|||
|
1 |
|
ε(p) |
|
UЗАД (p)−UН (p)+UТ (p) |
1 |
|
|
|||||
ПВ: |
|
W |
(p)= UВВ(p)= |
k2 |
|
; |
|
|
(4.2) |
||||
|
|
2 |
UУ (p) |
(T1 p +1)(T2 p +1) |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||
34
возбудитель В: |
W (p)= U |
ВГ (p)= |
|
k3 |
|
; |
(4.3) |
||||
|
|
||||||||||
|
|
3 |
U ВВ(p) |
T3 p +1 |
|
|
|||||
|
|
|
|
|
|||||||
генератор |
по каналу управления: |
|
|
|
|
|
|||||
С |
W'4 (p)= |
EГ (p) |
= |
|
k'4 |
; |
(4.4) |
||||
|
|
||||||||||
|
|
|
|||||||||
|
UВГ (p) |
T4 p +1 |
|
||||||||
|
|
|
|
||||||||
генератор |
по каналу возмущения: |
|
|
|
|
|
|||||
|
|
W''4 (p)= U0 |
(p)= k''4 (T5 p +1); |
(4.5) |
|||||||
|
|
|
IГ |
(p) |
T4 p +1 |
|
|
||||
напряжен е генератора:U Г ( p) = EГ ( p) −U0 ( p) ; |
|
|
|
|
(4.6) |
|
|||||||||||||
канал змерен я тока: |
W |
|
(p)= |
UТ (p) |
= k |
|
|
|
|
|
|
|
(4.7) |
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
5 |
|
|
|
IГ |
(p) |
|
5 |
|
|
|
|
|
|
|
||||
и |
U |
Н |
(p) |
= k |
|
|
, |
|
|
|
|
(4.8) |
|
||||||
и напряжен я: |
W |
(p)= |
|
|
|
(p) |
|
|
|
|
|
|
|
||||||
|
6 |
|
|
U Г |
|
6 |
|
|
|
|
|
|
|
||||||
где ki – коэффициенты передачи; Ti |
– постоянные времени. |
|
|
|
|||||||||||||||
Численныебзначения параметров передаточных функций: k1 (см. |
|||||||||||||||||||
табл. 9); k2 = 20; k3 = 4∙10–4 |
/В; k′4 = 310 В/ |
; k′′4 = 0,5 В/А; k5 = 0,1 В/А; |
|||||||||||||||||
k6 = 0,8; T1 = 0,01 с; T2 = 0,05 с; T3 = 0,05 с; T4= 0,5 c; T5=0,02 c. |
|
|
|||||||||||||||||
|
|
|
|
Д |
|
|
|||||||||||||
А |
|
|
Таблица 9 |
||||||||||||||||
Значения исследуемых параметров |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Варьируемый параметр k1 |
|
|
|
||||||||
|
|
|
1 |
|
1,25 |
|
1,5 |
|
|
1,75 |
2,0 |
2,25 |
|
2,5 |
2,75 |
|
|||
Исследуемые показатели замкнутой системы |
|
|
|
|
|
|
|
|
|
||||||||||
Время регулирования tР, с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перерегулирование σ, % |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Статическая ошибка СТ, В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Исследуемые показатели разомкнутой системы |
|
И |
|
||||||||||||||||
Запас по амплитуде ∆L, дБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Запас по фазе ∆ϕ, ° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Порядок выполнения работы
1. Составить в обозначениях Simulink структурную схему модели автоматической системы стабилизации (рис. 20).
35
2. |
Получить переходную временную характеристику замкнутой |
||||||
линеаризованной системы по каналу управления при воздействии |
|||||||
UЗАД = 1(t) и начальном значении параметра k1 = 1. Получить числен- |
|||||||
ные значения показателей качества регулирования tР, σ и |
СТ. Занести |
||||||
результаты в табл. 9. |
|
|
|
|
|
||
3. |
Получить переходную временную характеристику замкнутой |
||||||
линеаризованной системы по каналу возмущения при воздействии |
|||||||
IГ = 1(t) и начальном значении параметра k1 |
= 1. Получить численные |
||||||
значен |
я показателей качества регулирования tР, σ и |
СТ. |
|
||||
4. |
Получ ть ЛАХ, ЛФХ и АФЧХ разомкнутой линеаризован- |
||||||
варьируя |
|
|
|
|
|
||
ной системы по каналу управления при начальном значении парамет- |
|||||||
Сра k1 = 1. По соответствующим критериям оценить устойчивость сис- |
|||||||
темы |
получ ть ч сленные значения запасов устойчивости по ам- |
||||||
плитуде ∆L фазе ∆ϕ. Занести результаты в табл. 9. |
|
|
|||||
5. |
б |
по |
каналу |
управления, |
|||
Провести |
сследование |
системы |
|||||
|
значен я параметра k1 согласно табл. |
9. Построить графики |
|||||
характер ст к tР = f(k1); σ = f(k1); |
СТ = f(k1); ∆L = f(k1); ∆ϕ = f(k1). |
||||||
|
|
А |
|
|
|||
|
|
Содержание отчета |
|
|
|
||
1. |
Функциональная схема и структурная схема модели автома- |
||||||
тической системы ста илизации напряжения в обозначениях Simulink. |
|||||||
2. |
Переходные временные характеристики замкнутой линеари- |
||||||
|
|
Д |
|||||
зованной системы по каналам управления и возмущения при k1 = 1 с |
|||||||
численными значениями показателей качества регулирования. |
|||||||
3. |
ЛАХ, ЛФХ и АФЧХ разомкнутой линеаризованной системы |
||||||
по каналу управления при k1 = 1 с численными значениями запасов |
|||||||
устойчивости по амплитуде ∆L и фазе ∆ϕ. |
И |
||||||
4. |
Графики |
характеристик |
tР = f(k1); σ |
= |
f(k1); |
СТ = f(k1); |
|
∆L = f(k1); ∆ϕ = f(k1).
Контрольные вопросы и задания
1.Объяснить устройство и принцип работы автоматической системы стабилизации напряжения по рис. 19.
2.Сформулировать фундаментальные принципы управления, продемонстрировать их на структурной схеме модели системы.
3. |
Дать определения показателям качества регулирования tР, |
σ, СТ. |
4. |
Проанализировать полученные характеристики tР = |
f(k1); |
σ = f(k1); СТ = f(k1); ∆L = f(k1); ∆ϕ = f(k1).
36
|
|
|
|
Лабораторная работа №5 |
|
||||
ИССЛЕДОВАНИЕ АВТОМАТИЧЕСКОЙ СИСТЕМЫ |
|||||||||
РЕГУЛИРОВАНИЯ УГЛОВОЙ СКОРОСТИ |
|||||||||
ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ |
|||||||||
Цель работы − исследовать математическую модель автомати- |
|||||||||
ческой системы регулирования угловой скорости дизельного двигате- |
|||||||||
ля внутреннего сгоран |
я. |
|
|
|
|
||||
Устройство с стемы. Автоматическая система регулирования |
|||||||||
(рис. 21) предназначена для поддержания постоянного значения угло- |
|||||||||
Свой скорости вращен |
я ω дизельного двигателя внутреннего сгорания |
||||||||
(ДВС). В с стему входят: ДВС – объект управления; РМ – рычажный |
|||||||||
механ зм; рейка топл вного насоса высокого давления (ТНВД); |
|||||||||
МП – механ ческая передача; ЦБМ – центробежный маятник; |
|||||||||
ГСП – г дравл ческ й сервопривод, состоящий из гидроусилителя |
|||||||||
ГУгидроцл, |
ндра ГЦ, рычага ГСП с катарактом К и пружиной П. |
||||||||
ГСП |
|
|
|
Рычаг ГСП |
|
|
ЦБМ |
||
|
П |
|
|
|
|
|
|||
|
|
|
|
|
|
F |
|
F |
|
б |
|
||||||||
|
|
|
|||||||
|
m' |
|
|
|
s |
|
|
|
|
|
|
|
l2 |
|
l1 |
|
z |
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
К |
|
|
|
|
|
|
|
А |
|
|||||
|
ГЦ |
|
|
|
ГУ |
Д |
|||
|
|
|
|
|
|
||||
|
|
|
|
m |
|
|
|
|
ω |
|
РМ |
|
|
|
ДВС |
|
МП |
МС |
|
|
|
|
|
x |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
Рейка ТНВД |
|
|
И |
||||
Рис. 21. Функциональная схема автоматической системы регулирования |
|||||||||
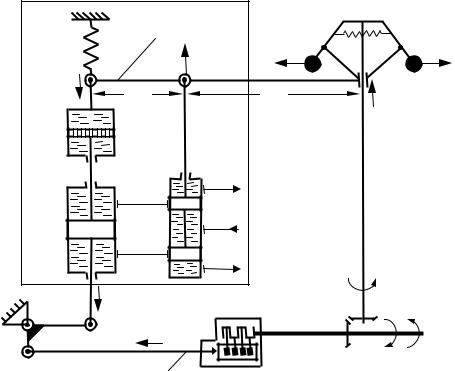
Принцип работы системы. ЦБМ (регулятор Ватта) в системе выполняет функции преобразователя, воспринимающего текущую угловую скорость ДВС, задатчика угловой скорости и элемента сравнения, вычисляющего сигнал рассогласования текущей и заданной угло-
37
вой скоростей ε и преобразующего его в перемещение муфты z. Если |
|||||||||||||||
нагрузка на ДВС уменьшится, то уменьшится момент сопротивления |
|||||||||||||||
на валу M , следовательно фактическая угловая скорость ДВС ω воз- |
|||||||||||||||
растет. Грузы ЦМБ под действием возросшей центробежной силы F |
|||||||||||||||
разойдутся, и под действием внутренних тяг муфта ЦМБ переместятся |
|||||||||||||||
вверх. Пропорционально перемещению муфты z под действием рычага |
|||||||||||||||
золотник ГУ переместится на величину s и приоткроет доступ рабочей |
|||||||||||||||
жидкости в верхнюю полость гидроцилиндра ГЦ. Поршень и шток ГЦ |
|||||||||||||||
начнут перемещаться вниз на величину m и через РМ изменят положе- |
|||||||||||||||
ние рейки ТНВД x. Насос начнет уменьшать подачу топлива в ДВС, |
|||||||||||||||
вследств |
чего угловая скорость ω уменьшится. |
В первый момент |
|||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
вместе со штоком ГЦ переместятся поршень и цилиндр ката- |
||||||||||||
ракта К, опуская рычаг ГУ вниз. Однако затем пружина П потянет ци- |
|||||||||||||||
линдр катаракта К вверх, а жидкость в цилиндре К через отверстия в |
|||||||||||||||
поршне постепенно перетечет из верхней полости в нижнюю, оставляя |
|||||||||||||||
шток ГЦ неподв жным, но возвращая рычаг ГУ в прежнее положение. |
|||||||||||||||
времени |
|
|
|
|
|
|
|
|
|||||||
|
|
Так в с стеме реализована инерционная гибкая обратная связь |
|||||||||||||
(изодромная), которая в начале переходного процесса, когда скорость |
|||||||||||||||
изменения переменных велика, ведет |
|
как жесткая и повышает бы- |
|||||||||||||
стродействие системы. Далее, по мере замедления переходного про- |
|||||||||||||||
|
|
|
себя |
|
|
|
|
|
|
||||||
цесса, действие ги кой о ратной связи спадает до нуля, в результате |
|||||||||||||||
чего охваченное ею интегрирующее звено – ГУ с ГЦ ведет себя, как |
|||||||||||||||
звено без обратной связи, обеспечивая астатизм системы в целом и |
|||||||||||||||
устраняя ошибку регулирования. В конце переходного процесса угло- |
|||||||||||||||
вая скорость ДВС |
А |
|
|
|
|||||||||||
ω стабилизируется, и система окажется в новом ус- |
|||||||||||||||
тановившемся режиме. Если нагрузка на валу двигателя возрастет, |
|||||||||||||||
действие системы будет направлено на увеличение подачи топлива и |
|||||||||||||||
восстановление исходной скорости ω, т.е. знаки перемещений z, s, m и |
|||||||||||||||
x зависят от знака сигнала рассогласованияДε. Структурная схема мо- |
|||||||||||||||
дели системы регулирования изображена на рис. 22. |
|
|
|
|
|||||||||||
|
|
|
ЦБМ |
|
ГСП |
|
|
|
|
|
MС |
|
W''7(p) |
ω'' |
|
|
|
|
|
|
|
|
|
|
|
|
|
– ω |
|||
ω |
|
ε |
|
z |
|
s' |
s |
|
m |
|
x |
|
ω' |
||
зад |
|
W1(p) |
|
W2(p) |
|
|
W5(p) |
|
|
И |
|||||
|
|
–ω |
|
|
– |
|
|
W6(p) |
|
W'7(p) |
|
|
|||
|
|
|
|
|
s'' |
|
|
|
|
|
ДВС |
|
|
||
|
|
|
|
|
|
|
W3(p) m' W4(p) |
|
|
|
|
||||
|
Рис. 22. Структурная схема модели автоматической системы регулирования |
||||||||||||||
38
Передаточные функции звеньев системы регулирования:
ЦБМ: |
W1(p)= |
z(p) |
= |
|
|
|
|
|
|
z(p) |
|
|
|
|
|
|
|
= |
|
|
|
|
|
k1 |
|
|
|
|
; |
(5.1) |
||||||||||||||||
ε(p) |
|
ω |
|
|
(p)−ω(p) |
T 2 p2 +T p +1 |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
зад |
|
|
|
|
|
|
s'(p) |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||
плечо рычага ЦБМ – ГУ: |
|
W |
|
(p)= |
|
= |
|
|
|
|
l2 |
|
|
|
= k |
2 |
; |
|
|
|
(5.2) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
z(p) |
|
|
|
|
|
|
l1 +l2 |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
плечо рычага ГЦ – ГУ: |
|
|
|
|
W |
|
(p)= s''(p) |
|
= |
|
|
|
l1 |
|
|
|
= k |
3 |
; |
|
|
|
(5.3) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
m'(p) |
|
|
|
|
|
|
l1 +l2 |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
катаракт с пруж ной: |
W |
|
(p)= |
|
m'(p) |
= |
|
|
|
|
|
|
|
|
T4 p |
|
|
|
|
; |
|
(5.4) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
С |
|
|
|
4 |
|
|
|
|
|
|
|
m(p) |
|
|
|
|
|
T32 p2 +T4 p +1 |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
перемещен е золотн ка ГУ: |
|
|
s( p) = s'( p) − s''( p); |
|
|
|
|
|
|
(5.5) |
||||||||||||||||||||||||||||||||||||
ГУ-ГЦ: |
|
|
|
|
|
W |
(p)= |
m(p) |
|
|
= k5 ; |
|
|
|
|
|
|
|
|
|
|
(5.6) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
и |
|
|
|
|
|
|
s(p) |
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
РМ: |
|
|
|
|
|
W |
(p)= |
x(p) |
|
= k |
|
; |
|
|
|
|
|
|
|
|
|
|
|
(5.6) |
||||||||||||||||||||||
|
|
|
|
|
m(p) |
6 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
ДВС по каналу управления: |
|
|
|
|
|
ω'(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
W' |
|
(p)= |
= |
|
|
|
|
|
k'7 |
|
; |
|
|
|
|
|
|
|
|
(5.7) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
T7 p +1 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
x(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
А |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
ДВС по каналу возмущения: |
|
|
|
|
ω''(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
W''7 (p)= |
|
|
= |
|
|
|
|
|
|
k''7 |
|
|
; |
|
|
|
|
|
|
(5.8) |
|||||||||||||||||||||||
|
|
|
|
MС(p) |
|
T7 p +1 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
угловая скорость вращения ДВС: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
ω( p) = ω'( p) −ω"( p), |
|
|
|
|
|
|
|
|
|
|
(5.9) |
||||||||||||||||||||||||||||||
где ki – коэффициенты передачи; Ti – постоянныеИвремени; s′ – перемещение золотника ГУ от ЦБМ; s′ – перемещение золотника ГУ от ГЦ; s – суммарное перемещение золотника ГУ; ω – текущая угловая ско-
рость вращения ДВС; ωзад – заданная угловая скорость вращения ДВС.
Численные значения параметров передаточных функций:
k1 = 10–4 м∙с/рад; l1 (см. табл. 10); l2 = 0,2 м; k5 = 2 с -1; k6 = 0,1; k′7 = 5·105 рад/(с∙м); k′′7 = 2 рад/(с∙Н∙м); T1 = 0,1 с; T2 = 0,2 с; T3 = 0,1 с; T4 (см. табл. 10); T7 = 0,3 с.
39

Таблица 10
|
|
|
|
|
|
|
Значения исследуемых параметров |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Исследуемые показатели замкнутой системы |
|
|
|
|
|||||||||
|
|
|
|
|
|
tР, с |
|
|
|
|
σ, % |
|
|
|
|
|
||
|
l1 |
|
|
|
|
|
|
|
|
l1 |
|
|
|
|
|
|
|
|
С |
|
0,4 |
0,2 |
0,1 |
|
0,8 |
0,6 |
|
0,4 |
|
0,2 |
0,1 |
|
|||||
|
T4 |
0,8 |
|
0,6 |
|
T4 |
|
|
|
|||||||||
|
0,1 |
|
|
|
|
|
|
|
|
0,1 |
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1,5 |
|
|
|
|
|
|
|
|
1,5 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Исследуемые |
показатели |
разомкнутой системы |
|
|
|
|
|||||||
|
|
|
|
|
∆L, дБ |
|
|
|
|
∆ϕ, ° |
|
|
|
|
|
|||
|
2 |
|
|
|
|
б |
2 |
|
|
|
|
|
|
|
|
|||
|
l1 |
|
0,8 |
|
0,6 |
|
0,4 |
0,2 |
0,1 |
l1 |
0,8 |
0,6 |
|
0,4 |
|
0,2 |
0,1 |
|
|
T4 |
|
|
|
T4 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0,1 |
|
|
|
|
|
|
|
|
0,1 |
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
||||
|
1,5 |
|
|
|
|
|
|
|
|
1,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Порядок выполнения работы |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
Д |
|
|
|||||||
|
|
1. Составить в обозначениях Simulink структурную схему мо- |
||||||||||||||||
|
дели автоматической системы регулирования (рис. 22). |
|
|
|
|
|
||||||||||||
|
|
2. Получить переходную временную характеристику замкнутой |
||||||||||||||||
|
линеаризованной системы по каналу управления при воздействии |
|||||||||||||||||
|
ωзад = 1(t) и начальном значении параметров l1 |
= 0,8 и T4 = 0,1. По ви- |
||||||||||||||||
|
ду характеристики оценить устойчивость системы и получить чис- |
|||||||||||||||||
|
ленные значения показателей качества регулирования tР |
и σ. Занести |
||||||||||||||||
|
результаты в табл. 10. |
|
|
|
И |
|||||||||||||
3.Получить переходную временную характеристику замкнутой линеаризованной системы по каналу возмущения при воздействии МC = 1(t) и начальном значении параметров l1 = 0,8 и T4 = 0,1. Получить численные значения показателей качества регулирования tР и σ.
4.Получить ЛАХ, ЛФХ и АФЧХ разомкнутой линеаризованной системы по каналу управления при начальном значении параметров l1 = 0,8 и T4 = 0,1. По логарифмическим критериям оценить устойчивость системы и получить численные значения запасов устойчиво-
сти по амплитуде ∆L и фазе ∆ϕ. Занести результаты в табл. 10.
40
5. Провести исследование системы по каналу управления, варьируя значения параметров l1 и T4 согласно табл. 10. Построить графики
характеристик tР = f(l1;T4); σ = f(l1;T4); ∆L = f(l1;T4); ∆ϕ = f(l1;T4).
6. Интерполяцией полученных графиков определить оптимальные значения параметров l1 и T4 для автоматической системы с учетом целевой функции tР → 0 и ограничению σ ≤ 10%.
|
Содержание отчета |
1. |
Функц ональная схема и структурная схема модели автома- |
скорости |
|
тической с стемы регулирования угловой скорости. |
|
С2. труктурная схема модели системы регулирования угловой |
|
|
дв гателя внутреннего сгорания в обозначениях Simulink. |
3. |
Переходные временные характеристики замкнутой линеаризо- |
|
б |
ванной с стемы по каналам управления и возмущения при l1 = 0,8 и |
|
T4 = 0,1 с ч сленными значениями показателей качества регулирования. |
|
4. |
ЛАХ, ЛФХ АФЧХ разомкнутой линеаризованной системы |
по каналу управлен я при l1 = 0,8 и T4 = 0,1 с численными значениями |
|
|
А |
запасов устойчивости по амплитуде ∆L и фазе ∆ϕ. |
|
5. |
Графики характеристик tР = f(l1;T4); σ = f(l1;T4); ∆L = f(l1;T4); |
∆ϕ = f(l1;T4). Оптимальные значения параметров l1 и T4. |
|
|
Контрольные вопросы и задания |
1. |
Объяснить устройство и принцип работы автоматической |
системы с внутренней изодромной обратной связью по рис. 21. |
|
2. |
От чего зависит перемещения муфты ЦМБ? |
3. |
Как устроен катаракт? |
4. |
Для чего нужен рычаг ГСПД? |
5. |
Объяснить принцип управления по отклонению. |
6. |
Что такое переходная временная характеристика системы? |
7. |
В чем суть логарифмических критериев устойчивости? |
8. |
В чем суть критерия устойчивости Найквиста? |
9. |
Какими показателями характеризуетсяИкачество регулирова- |
ния автоматической системы? |
|
10. |
Как графически находятся оптимальные значения l1 и T4? |
41
Лабораторная работа № 6
ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ АВТОМАТИЧЕСКОЙ ИСТЕМЫ РЕГУЛИРОВАНИЯ ТМПЕРАТУРЫ
Цель работы − исследовать математическую модель нелинейной автоматической системы регулирования температуры в сушильной камере.
В особый класс нелинейных автоматических систем выделяют
релейные с стемы. В релейном элементе такой системы при плавном
изменен |
входного с гнала выходной сигнал изменяется скачкооб- |
||
разно |
меет два |
ли более стационарных состояний, при которых он |
|
С |
|
|
|
постоянен в некотором диапазоне входного воздействия. |
|||
актическое |
|
||
Релейная аппаратура о ладает рядом преимуществ по сравне- |
|||
|
работе |
||
нию аналоговыми электронными и цифровыми устройствами: про- |
|||
стота устройства |
надежность в |
; высокое быстродействие или |
|
пр |
отсутств е инерционности; помехоустойчивость – ста- |
||
бильность выходного параметра при случайном изменении входного воздейств я в некотором диапазоне; возможность реализовать сложный логический алгоритмАра оты.
Устройство системы. втоматическая система регулирования (рис. 23) предназначена для поддержания постоянного значения температуры в сушильной камере (СК). В систему входят: СК – объект управления; ПИМ – потенциометрический измерительный мост; ПР – трёхпозиционное поляризованноеДреле с обмотками управления ОУ1 и ОУ2; ИД – исполнительный двигатель постоянного тока с независимой обмоткой возбуждения ОВД; Р – редуктор; РЗ – регулирующая заслонка; КПОС– кольцевой потенциометр внутренней обратной связи.
Принцип работы системы. Выходным параметром системы является температура t° в СК, которая нагнетаетсяИгреющим агентом – нагретым газом, поступающим совместно с холодным воздухом в камеру через РЗ. Соотношение между количеством горячего газа и холодного воздуха устанавливается положением РЗ, приводимой в движение исполнительным механизмом – ИД с редуктором Р.
Задание температуры в СК реализуется переменным резистором Rзад, имеющим градуировочную шкалу в °C, а измерение – термосопротивлением R°, включенным в одно из плеч моста. П М в системе выполняет функции преобразователя, воспринимающего изменение сопротивления R°, задатчика температуры и элемента сравнения, вычис-
ляющего сигнал рассогласования текущей и заданной температуры ε и преобразующего его в напряжение и, соответственно, ток I1 на измерительной диагонали.
42
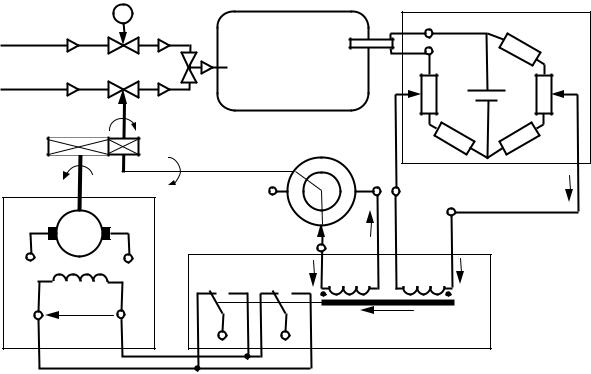
Воздух |
|
|
Н |
|
|
|
R° |
|
ПИМ |
|
|
|
|
|
|
t° |
|
||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
СК |
|
|
|
|
|
Газ |
|
|
|
|
|
|
|
+ |
Rзад |
|
|
|
|
|
|
|
|
|
|||
|
Р |
РЗ |
φ |
|
КПОС |
|
|
– |
|
|
|
|
|
|
|
|
|
|
|
||
α |
|
|
|
φ |
+ |
|
– |
|
|
I1 |
С |
|
|
|
I2 |
|
|
|
|||
|
F2 |
ОУ2 |
ОУ1 |
F1 |
|
|||||
– |
|
|
+ |
|
|
|||||
|
ОВД |
|
|
|
|
|
|
|
|
|
ИД |
UВД |
|
– |
+ |
|
|
F0 |
ПР |
|
|
|
|
|
|
|
|
|
|
|
||
и |
|
|
|
|
|
|
||||
Рис. 23. Функц ональная схема автоматической системы регулирования |
||||||||||
Для усиления мощности управляющего сигнала в системе ис- |
||||||||||
пользуется бтрёхпозиционное ПР. Ток I1 создает в обмотке управления |
||||||||||
реле ОУ1 |
направленную магнитодвижущую силу (М |
С) F1, создаю- |
||||||||
щую магнитный поток, который притягивает якорь ПР в соответст- |
||||||||||
вующую сторону. Контакты якоря переключают полярность питаю- |
||||||||||
щего напряжения UВД обмотки возбуждения |
, изменяя направле- |
|||||||||
|
|
|
|
А |
|
|
||||
ние вращения ИД. Последний, вращаясь в ту или иную сторону, через |
||||||||||
редуктор Р приоткрывает или закрывает заслонку РЗ на угол φ, тем |
||||||||||
самым изменяя подачу нагретого газа в СК. В результате чего изменя- |
||||||||||
ется температура t° внутри СК. При достижении температуры t° за- |
||||||||||
данного значения ПИМ уравновешивается, напряжение на его диаго- |
||||||||||
|
|
|
|
|
ОВД |
|||||
нали исчезнет и якорь ПР перейдет в нейтральнее положение, отклю- |
||||||||||
чая напряжение на ОВД. В результате ИД остановится, и система пе- |
||||||||||
рейдет в стационарный режим. Также в системе предусмотрен контур |
||||||||||
внутренней отрицательной обратной связи, реализованной с помо- |
||||||||||
щью КПОС, скользящий контакт которого перемещаетсяИредуктором |
||||||||||
Р на угол поворота заслонки φ, и подключенной к нему второй об- |
||||||||||
мотки управления ПР ОУ2. Ток I2 обмотки ОУ2 создает МДС F2, на- |
||||||||||
правленную встречно МДС F1, из-за встречного расположения самих |
||||||||||
обмоток. В результате чего результирующая МДС реле F0 |
будет оп- |
|||||||||
ределяться разностью МДС обмоток ОУ1 |
и ОУ2 (6.4). На рис. 24 пред- |
|||||||||
ставлена статическая характеристика ПР. |
|
|
|
|
||||||
43
|
|
|
|
|
|
|
|
|
|
UВД |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+UВД |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
–Fcp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
–UВД |
|
|
|
|
|
|
|
|
+F |
cp |
|
|
|
F0 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зона нечувствительности |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Рис. 24. Статическая характеристика поляризованного реле |
|
|
|||||||||||||||||||||||||
|
труктурная схема модели системы регулирования изображена |
|||||||||||||||||||||||||||
на |
. 25. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
ПР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
ПИМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
t°зад |
ε |
|
F1 |
|
F0 |
|
|
|
|
|
|
UВД |
|
|
|
|
|
α |
|
|
φ |
|
|
t° |
||||
WПИМ(p) |
|
|
|
|
|
|
|
|
WИД(p) |
WР(p) |
|
WСК(p) |
|
|||||||||||||||
|
– |
|
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
t° |
|
|
|
F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
WКПОС(p) |
|
|
|
|
|
|
||||||||||
рис |
|
|
|
|
|
|
||||||||||||||||||||||
Рис. 25. Структурная схема модели автоматической системы регулирования |
||||||||||||||||||||||||||||
|
|
б |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Уравнения звеньев системы в операторной форме: |
|
|
|
|
||||||||||||||||||||||||
СК: |
|
|
|
|
pT0t°(p)+t°(p)= k0ϕ(p); |
|
|
|
|
(6.1) |
||||||||||||||||||
ПИМ: |
|
F1 |
(p)= k1ε(p)= k1t°зад(p)− k1t°(p); |
|
|
(6.2) |
||||||||||||||||||||||
|
|
|
|
А |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
при F0 > +Fср; |
|
|
|
|
|
|
|
||||||||||
ПР: |
|
|
|
|
+UВД |
|
|
|
|
|
|
|
||||||||||||||||
|
UВД |
= |
0 |
|
|
|
при − Fср ≤ F0 ≤ +Fср; |
|
|
(6.3) |
||||||||||||||||||
|
|
|
|
|
−U |
ВД |
при F |
< −F |
, |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
ср |
|
|
|
|
|
|
|
||||||
где |
|
|
|
|
|
|
|
|
|
|
|
Д |
(6.4) |
|||||||||||||||
|
|
|
|
F0 (p)= F1 |
(p)− F2 |
(p); |
|
|
|
|
|
|||||||||||||||||
ИД: |
|
|
|
|
|
pα(p)= k2UВД (p); |
|
|
|
|
|
|
(6.5) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|||||||
(6.6)
(6.7)
где р – оператор Лапласа; ki – коэффициенты передачи; Ti – постоянные времени; α – угол поворота вала ИД; iр – передаточное отношение редуктора; t° – текущее значение температуры в СК; t°зад – заданное значение температуры в СК; Fср – порог срабатывания ПР по результирующей МДС.
44

Варианты численных значений параметров нелинейной автоматической системы представлены в табл. 11.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 11 |
|||
|
|
|
|
Варианты численных значений параметров |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
Номер варианта |
|
|
|
|
|
|
||||||
|
Параметры |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
системы |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
9 |
10 |
|
11 |
12 |
|
|
|
Т0, с |
|
|
15 |
5 |
10 |
15 |
20 |
10 |
18 |
20 |
|
12 |
10 |
|
15 |
20 |
|
|
k0, ° /рад |
|
10 |
15 |
20 |
25 |
30 |
35 |
15 |
12 |
|
18 |
8 |
|
10 |
30 |
|
|
|
k1, А/° |
|
|
0,3 |
0,4 |
0,5 |
0,2 |
0,25 |
0,35 |
0,6 |
0,7 |
|
0,8 |
0,9 |
|
0,4 |
0,35 |
|
|
k2, |
|
|
2 |
1 |
3 |
4 |
2,5 |
1,5 |
3,5 |
4,5 |
|
5 |
5,5 |
|
1 |
1,5 |
|
|
рад/(В∙с) |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|||
|
iр |
|
|
800 |
700 |
900 |
500 |
100 |
120 |
110 |
750 |
|
850 |
950 |
|
900 |
110 |
|
|
kос·10-3, |
|
|
|
|
|
4,5 |
1,0 |
1,5 |
5,0 |
|
5,5 |
6,0 |
|
3,5 |
1,5 |
|
|
|
и2,5 3,0 3,5 4,0 |
|
|
|
||||||||||||||
|
А/рад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fср, А |
|
0,5 |
0,4 |
0,3 |
0,6 |
0,7 |
0,8 |
0,55 |
0,65 |
|
0,45 |
0,75 |
|
0,6 |
0,65 |
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
||||
|
UВД, В |
|
100 110 |
120 130 125 100 110 |
120 |
130 |
125 |
|
130 |
120 |
|
|||||||
|
|
|
|
|
Порядок выполнения работы |
|
|
|
|
|
|
|||||||
1. |
Изучить принцип работы нелинейной автоматической систе- |
|||||||||||||||||
|
|
|
|
|
|
|
|
Д |
|
|
||||||||
|
мы регулирования температуры по рис. 23. |
|
|
|
|
|
|
|
|
|||||||||
2. |
Вывести передаточные функции линейных элементов авто- |
|||||||||||||||||
|
матической системы по формулам (6.1), (6.2), (6.5), (6.6), (6.7). |
|
|
|||||||||||||||
3. |
Смоделировать нелинейную часть системы в виде статической |
|||||||||||||||||
|
характеристики (рис. 24). Статическая характеристика ПР в Simulink |
|||||||||||||||||
|
реализуется за счет последовательного соединения блоков «Dead zone», |
|||||||||||||||||
|
«Sign» и «Gain». В блок « Dead zone» вводятся значения порог срабаты- |
|||||||||||||||||
|
вания ПР по результирующей МДС +/–Fср, блок «Sign» остается без из- |
|||||||||||||||||
|
менений, а в «Gain» – значения питающего напряжения UВД. |
|
|
|
|
|||||||||||||
4. |
Составить в обозначениях Simulink структурную схему мо- |
|||||||||||||||||
|
дели нелинейной автоматической системы регулированияИ(рис. 25). |
|||||||||||||||||
|
Численные значения параметров нелинейной автоматической системы |
|||||||||||||||||
|
берутся согласно вариантам (см. табл. 11). |
|
|
|
|
|
|
|
|
|||||||||
5. |
Получить график переходного процесса выходного парамет- |
|||||||||||||||||
ра системы при ступенчатом задающем воздействии t°зад(t) = 100. Исследование переходного процесса нелинейной системы проводить при помощи блока электронного осциллографа «Scope». По виду гра-
45
фика оценить устойчивость системы и определить численные значе-
ния показателей качества регулирования tР, σ и |
СТ. |
6. Получить фазовую траекторию выходного параметра систе- |
|
мы при ступенчатом задающем воздействии t°зад(t) = 100. Исследование фазовой траектории нелинейной системы проводить при помощи блока «XY Graph», на вход « X» которого подается величина иссле-
дуемого сигнала, а на вход «Y» − производная сигнала по времени. По виду графика оценить устойчивость системы, тип фазовой тр аектории, т п особой точки фазовой траектории.
С |
Содержание отчета |
|||
|
|
|
||
1. |
Функц ональная схема и структурная схема модели нели- |
|||
нейной |
автомат ческой |
регулирования температуры. |
||
2. |
Структурная схема модели нелинейной автоматической сис- |
|||
темы в обозначен ях Simulink. |
|
|
||
системы |
|
|
||
3. |
Передаточные функции линейных элементов автоматической |
|||
системы с ч сленными значениями параметров. |
||||
4. |
График переходного процесса выходного параметра системы |
|||
при ступенчатом задающем воздействии t°зад(t) = 100. |
||||
5. |
б |
|
||
Фазовая траектория выходного параметра системы при сту- |
||||
пенчатом задающем воздействии t°зад(t) = 100. |
||||
6. |
Выводы по устойчивости и качеству регулирования нели- |
|||
нейной автоматической системы: tР, σ и |
СТ. |
|||
|
|
А |
||
|
|
|
Д |
|
Контрольные вопросы и задания
1.Объяснить устройство и принцип работы нелинейной автоматической системы регулирования температуры по рис. 23.
2.Какая система называется нелинейной?
3.Что представляют собой релейный элемент?
4.Приведите преимущества релейной аппаратуры.
5.Изобразите статическую характеристику и приведите уравнение поляризованного реле.
6.Как реализуется в Simulink статическая характеристика поляризованного реле?
7.Что такое фазовое пространство, изображающая точка, фазовая траектория и фазовый портрет?
8.Какие существуют типовые фазовые траектории, и какие особые точки им соответствуют? И
46