

1410
.pdfвыдача рекомендаций по изменению режимов управления.
Рассмотрим особенности АСУД, определяющие основные принципы их построения.
Современная АСУД создается как общегородская система, зоной действия которой является дорожно-транспортная сеть города. В этом находит выражение единый системный подход к управлению движением транспортных потоков, значительно возрастает взаимозависимость условий движения различных районов дорожно-транспортной сети между собой. Сеть и потоки в ней становятся единым организмом, требующим единого системного управления [4].
Общегородской характер АСУД имеет своим следствием повышение степени централизации управления. Это приводит, если учитывать значительные размеры территории современных крупных городов, к наличию в составе системы большого числа пунктов управления и контроля за движением, оборудованных аппаратурой автоматики и удалённых на десятки километров от управляющего центра.
Структурно АСУД представляет собой совокупность упорядоченных приёмов управления и взаимосвязанных элементов, реализующих эти приёмы. Основными компонентами, составляющими эффективно действующую АСУД, являются:
комплекс технических средств;
программное (математическое) обеспечение;
организационное обеспечение.
Комплекс технических средств – детекторы транспорта, устройства передачи различных видов информации, образующие управляющий вычислительный комплекс системы, местные исполнительные устройства (дорожные контроллеры управления светофорной сигнализацией, знаками и указателями), средства диспетчерского контроля и управления движением.
Программное обеспечение (ПО) системы состоит из внешнего и внутреннего. В АСУД внешнее ПО образует набор программ (их часто называют технологическими программами), реализующих конкретные алгоритмы управления транспортными потоками. Внутреннее ПО – неотъемлемая часть средств вычислительной техники системы, поставляемая изготовителем вместе с этими средствами. ПО включает в себя программы (их называют служебными), обеспечивающие взаимодействие различных частей управляющего вычислительного комплекса системы между собой, ввод и реализацию алгоритмов управления объектом, вывод результатов выполнения технологических программ. Кроме того, в состав внутреннего ПО входят программы контроля и диагностики вычислительного комплекса, а также вспомогательные программы для его тестирования и наладки.
21
Организационное обеспечение – штат специалистов, осуществляющих функции управления движением, а также эксплуатацию и обслуживание технических средств, подготовку и корректировку программ, составляющих ПО системы. Таким образом, наряду с техническими и математическими средствами человек является неотъемлемым элементом АСУД.
В процессе создания АСУД нельзя допускать недооценки какого-либо из этих трёх перечисленных компонентов. К сожалению, на практике часто имеет место недооценка математического обеспечения и подготовки персонала, что приводит к затягиванию сроков ввода систем в эксплуатацию и их невысокой эффективности.
1.4. Расчёт режимов управления
При настройке режимов управления АСУД используются уже готовые параметры управления, которые рассчитываются вне реального масштаба времени на основе собранной информации об условиях движения на перекрёстках. К основным параметрам управления, которые наиболее часто используются при подготовке программ координации, относятся длительность цикла, длительности фаз и величины сдвигов фаз. Расчёт фаз не рассматривается, так как эта процедура выполняется гораздо раньше, при проектировании организации дорожного движения для локального режима.
Аналитическое выражение для определения оптимальной длительности цикла T , обеспечивающего минимизацию задержки автомобиля у перекрёстка, можно выразить следующим образом [8]:
T |
1,5 5 |
, |
(1.15) |
|
1 Y |
||||
|
|
|
где – суммарное потерянное время за цикл; Y – суммарный фазовый коэффициент перекрёстка.
tпер , |
(1.16) |
i |
|
где tперi – длительность переходного периода в i-й фазе при смене
смежных фаз; n – число фаз регулирования; i – номер фазы. Величину Y можно определить по следующей формуле:
|
n |
|
|
|
|
Y |
|
i |
, |
(1.17) |
|
|
|||||
|
i |
1Si |
|
||
где i – интенсивность движения на входе перекрёстка по наиболее загруженному направлению i-й фазы; Si – поток насыщения.
Следует отличать величину переходного периода от величины
22
промежуточного такта. Переходный период является составной частью промежуточного такта.
Оптимальным считается цикл, при котором средняя задержка на один автомобиль при изменении длительности цикла в диапазоне 0,75Tопт T 0,15Tопт составляет 10 – 20% от минимальной величины.
Таким образом, изменение средней задержки на автомобиль малочувствительно к отклонениям от оптимальной длительности цикла, что упрощает применение предложенной формулы в практических применениях при подготовке программ координации, где величину цикла необходимо изменять на нескольких перекрёстках.
Эффективные длительности фаз (основные такты) ti при оптимальной длительности цикла регулирования определяются следующим выражением:
ti |
i |
(T ). |
(1.18) |
|
|||
|
Y |
|
|
При подготовке программ координации необходимо учитывать дополнительное требование при расчёте длительности основного такта:
ti tmin 2, |
(1.19) |
где tmin – минимальная длительность основного такта i-й фазы.
Это требование обусловлено необходимостью перехода с одной ПК на другую.
Расчёт величин сдвигов фаз выполняется при подготовке программ координации. Сдвиг фаз обеспечивает согласованную работу смежных перекрёстков, при которой достигается безостановочный режим движения автомобилей.
При проектировании АСУД обязательным условием является количество охватываемых системой перекрёстков. Эта величина должна быть не менее 25-ти перекрёстков. В противном случае система не оправдает вложенные в её создание средства.
Применение ручных методов подготовки ПК [1] на практике ограничено по причине большой трудоёмкости. Поэтому при подготовке библиотеки программ координации следует пользоваться программными средствами.
Программа «LENTA» позволяет рассчитывать программы координации для магистралей, а программа «Трасса» Tопт – для сетей со сложной структурой.
Графоаналитический метод расчёта ПК
Использование этого метода целесообразно для расчёта ПК на магистрали любой протяжённости с неравными перегонами и количеством
23
полос не менее двух для движения в каждом направлении и при любых значениях интенсивности движения. Основным недостатком этого метода является большая трудоёмкость.
Для расчёта ПК графическим методом необходимы следующие данные:
-схемы движения на перекрёстках;
-длительности цикла ПК;
-интенсивность движения по направлениям;
-расстояние между перекрёстками района управления (длины перегонов);
-средние величины скорости движения и времени проезда по перегонам.
Интенсивности движения должны быть в приведённых единицах на одну полосу движения.
Длина перегона указывается от стоп-линии одного перекрёстка до стоп-линии следующего (включая ширину зоны первого перекрёстка).
Важным вопросом при подготовке ПК является выбор средней скорости движения ТЕ. Учитывая опыт эксплуатации АСУД в нашей стране и за рубежом, можно отметить, что скорость движения групп ТЕ определяется рядом следующих условий: интенсивностью движения, числом полос, длиной перегона и др.
Введение координированного управления позволяет изменять среднюю скорость ТЕ на всей магистрали за счёт выравнивания её при движении ТЕ на перекрёстках. Поэтому искусственное навязывание определённой скорости движения ТЕ с помощью ПК эффекта не даёт.
Значения интенсивности и времени проезда должны соответствовать периоду времени, в течение которого будет функционировать рассчитываемая ПК.
График координированного управления строится в системе прямоугольных координат «время – путь». График выполняется на миллиметровой бумаге, по горизонтальной оси (в масштабе в 1 мм – 1 с) откладывают значение времени, по вертикальной оси (в масштабе в 1 мм – 10 м) последовательно откладывают отрезки прямой, соответствующие стоп-линиям перекрёстков регулируемой магистрали (рис. 1.1 и 1.2).
На горизонтальной полосе, соответствующей максимально загруженному перекрёстку, наносят в масштабе слева направо рассчитанную последовательность сигналов, указывая основные и промежуточные такты (например, перекрёсток 2).
От начала зелёного сигнала на этой горизонтали откладываем отрезок, равный времени проезда до следующего перекрёстка, затем к следующей горизонтали проводим перпендикуляр. Полученная точка есть время подхода пачки к перекрёстку. Аналогично получаем времена подхода
24
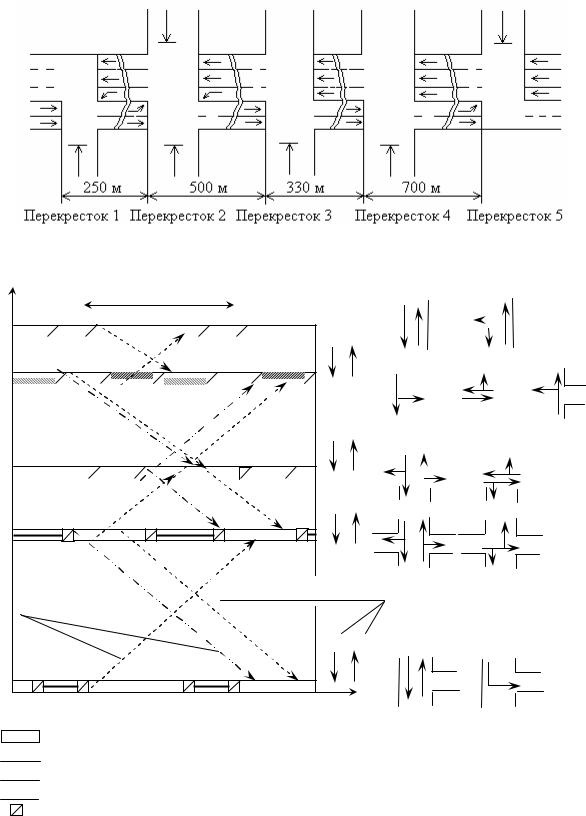
пачек по всей магистрали в прямом направлении. Соединяя полученные точки на смежных перекрёстках линией, получим траекторию движения лидеров пачек.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.1. Схема района управления |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тц |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
Ф1 |
|
200 |
|
|
|
Ф2 |
|
100 |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 |
2 |
1 |
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
250 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф2 |
|
|
|
|
Ф3 |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
1 |
|
|
2 |
|
|
3 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
250 |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
36 |
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
Ф1 |
|
|
|
|
|
|
|
|
Ф2 |
|
350 |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
1 |
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
20 |
22 |
350 |
|
250 |
4 |
|
|
|
4 |
|
|
Ф1 600 |
Ф2 |
200 |
2 |
1 |
2 |
1 |
2 |
|
|
|
100 |
|
|
|
|
|
||||||
|
|
350 |
|
|
|||||
|
|
|
|
|
|
|
|
100 |
|
Траектория лидера |
|
Время проезда перегона |
|
|
|||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
49 |
44 |
400 |
Ф2 300 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
5 |
|
|
Ф1 |
||
5 |
|
|
|
|
|
|
|
|
|
1 |
2 |
1 |
2 |
|
1 |
t |
400 |
|
|
- движение разрешено по магистрали в двух направлениях;
 - движение разрешено по магистрали только вверх;
- движение разрешено по магистрали только вверх;
 - движение разрешено по магистрали только вниз;
- движение разрешено по магистрали только вниз;


 - движение по магистрали запрещено; - промежуточный такт.
- движение по магистрали запрещено; - промежуточный такт.
Рис.1.2. График координированного управления
25
Для движения в обратном направлении выполняем такую же процедуру и получаем при этом времена подхода пачек в обратном направлении.
На линиях, соответствующих каждой поперечной магистрали, наносим последовательность сигналов светофорного регулирования с указанием номеров фаз таким образом, чтобы времена подхода пачек транспортных средств соответствовали зелёному сигналу. Взаимное расположение по горизонтали точек, соответствующих началу зелёных сигналов, определяет совокупность их сдвигов относительно принятой нулевой отметки (в нашем случае – относительно времени включения зелёного сигнала на втором перекрёстке).
В процессе подготовки графика «зелёной волны» могут возникать трудности, обусловленные различными длинами перегонов, временами проезда и другими причинами. В связи с этим предлагается ряд следующих рекомендаций, позволяющих решать возникающие проблемы:
а) если при небольшом расстоянии между перекрёстками при подходе пачки транспортных средств у стоп-линии уже образовалась очередь ТЕ, въехавших с пересекающих магистралей или же остановленных в предыдущем цикле, то необходимо давать опережение включения зелёного сигнала, чтобы к подходу пачки накопившиеся автомобили продвинулись за стоп-линию. Величина опережения определяется следующим образом:
tоп 2 T , |
(1.20) |
где T – длительность цикла, с; – интенсивность поворотного движения, авт./с;
б) при большом расстоянии между перекрёстками (L>700 м) рекомендуется давать запаздывание включения зелёного сигнала, чтобы уменьшить распадение пачек ТС на подходе к следующему перекрёстку. Величина запаздывания зависит от длины перегона и составляет примерно 10% от времени проезда;
в) при несовпадении времени прибытия встречных пачек на перекрёсток предпочтение отдаётся тому ТЕ, который прошёл более короткий перегон, можно также варьировать значениями времени проезда в пределах + 15%, за исключением тех случаев, когда время проезда обусловлено не только скоростью движения ТС, но и особенностями перегона:
-пересечение с трамвайными путями;
-железнодорожный переезд;
-остановки общественного транспорта без специальных подъездных карманов;
-искусственное сужение проезжей части;
-изменение полосности магистрали;
26
г) при несовпадении времени прибытия встречных пачек можно также в целях расширения ленты времени, повышения эффективности управления изменять порядок следования фаз в цикле для данного плана координации;
д) необходимо учитывать особенности организации движения:
-движение в прямом и обратном направлениях организовано в разных фазах;
-движение организовано в нескольких фазах;
-движение организовано в промежуточном такте;
-наличие вызывных фаз;
е) иногда при расчёте сдвигов целесообразно ввести дополнительные изменения схем движения с целью повышения эффективности координированного управления:
-организовать движение в прямом и обратном направлениях в разных фазах;
-организовать поворотные движения, мешающие разгрузке основного потока, в промежуточном такте или других фазах;
-организовать координируемое направление в нескольких фазах.
В случае необходимости можно изменить длительность зелёного сигнала для координируемого направления за счёт второстепенных (пересекающих) направлений или же за счёт ликвидации одной - двух фаз; ж) при небольших расстояниях управление на одном перекрёстке оказывает непосредственное влияние на транспортные процессы на соседнем перекрёстке, поэтому целесообразно до построения графика координированного управления на всей магистрали провести анализ взаимодействия на таких парах перекрёстков и рассчитать для них сдвиги включения сигналов друг относительно друга. Полученные результаты
использовать при построении графика; з) в ряде случаев, когда несколько перекрёстков на магистрали имеют
длительность цикла T /2, а один или два перекрёстка (как правило, с трёхфазной схемой) имеют длительность цикла T , в целях повышения эффективности ПК на перекрёстках с длительностью цикла T целесообразно организовывать повторение координируемой фазы (например, 1-2-1-3). Таким образом, длительность первой фазы делится на два равных интервала (при выполнении условия) и этим обеспечивается возможность прохождения «зелёной волны» в двух полуциклах;
и) в целях уменьшения задержки очередей ТЕ либо пешеходов без потерь эффективности ПК на трехфазных перекрёстках с циклами более 70 с целесообразно организовывать повторение включения этих фаз через другую фазу, например 1-2-3-2, где 2 – пешеходная фаза.
После нанесения на график последовательности сигналов для всех перекрёстков магистрали (с учётом вышеизложенных положений) график
27
приобретает законченный вид.
Кроме того, на графике должны быть указаны времена проезда (от стоп-линии предыдущего перекрёстка до стоп-линии следующего).
Если район управления представляет собой совокупность взаимосвязанных участков управления, ПК также состоит из соответствующих участков, имеющих одинаковые или кратные наименьшему циклу управления. В этом случае строятся графики ПК отдельно для каждого участка. При этом необходимо учитывать, что на перекрестке, являющемся пересечением двух участков управления (управляемых магистралей), сдвиг включения зеленого сигнала, рассчитанный в ПК для одного участка, является нулевой точкой отсчета при построении графика ПК для другого участка управления. Поэтому целесообразно вначале рассчитать сдвиги включения светофорных сигналов для магистрали, имеющей наибольшее количество пересечений с другими управляемыми магистралями, а затем последовательно рассчитывать ПК для каждого последующего участка.
Несмотря на то, что одним из критериев координированного управления является минимизация количества остановок, в ряде случаев на протяженной магистрали допускается вводить на одном из перекрестков запланированную остановку с целью формирования пачки, что дает больший эффект управления на всей магистрали по сравнению с пропуском пачки на конец зеленого сигнала. Такую остановку целесообразно планировать на длинном перегоне.
Контрольные вопросы
1.Какие основные свойства и состояния присущи транспортному потоку?
2.Какие применяются параметры управления?
3.Какие параметры транспортного потока применяются в системе?
4.Назовите основные рекомендации при построении графика «зеленой волны».
28
2.ТЕХНИЧЕСКИЕ СРЕДСТВА АСУД
2.1. Классификация технических средств
Комплекс технических средств для построения АСУД имеет значительное многообразие по функциональным возможностям и по назначению. В классификацию технических средств по функциональным возможностям входят следующие группы [5]:
периферийные технические средства (дорожные контроллеры, детекторы транспорта, контроллер зонального центра);
устройства центрального управляющего пункта (контроллер районного центра, дисплейный пульт оперативного управления, табло коллективного пользования);
контрольно-проверочная аппаратура (имитатор центра, инженерный пульт).
В настоящее время технические средства для управления дорожным движением выпускают около 15-ти фирм в Российской Федерации. Для удобства дальнейшего изложения в качестве примеров в основном будут приводиться изделия, выпускаемые ЗАО «Автоматика-Д» г. Омска.
2.1.1. Периферийные технические средства
Дорожные контроллеры (ДК) для локального управления дорожным движением. Эти устройства осуществляют переключение светофорной сигнализации только с учётом местных условий движения, существующих на управляемом перекрёстке. Обмен информацией с устройствами управляющих пунктов в данных контроллерах не предусмотрен.
Устройства данного класса подразделяются на следующие типы: ДК с вызывными устройствами, осуществляющие переключение
светофорных сигналов по вызову пешеходами. Предназначены для управления дорожным движением на пешеходных переходах транспортных магистралей или перекрёстках с малой интенсивностью движения транспорта по направлению, пересекающему магистрали. К этим устройствам относятся контроллеры ДКС с ТВП;
ДК с фиксированными длительностями фаз, осуществляющие переключение светофорных сигналов по одной или нескольким заранее заданным временным программам и предназначенные для управления дорожным движением на пересечениях улиц с мало изменяющейся в течение дня интенсивностью движения транспортных средств. К устройствам данного типа относятся модификации контроллеров ДКС, ДКП и др.;
ДК с переменной длительностью фаз, осуществляющие
29
переключение светофорных сигналов в зависимости от параметров транспортного потока и предназначенные для управления дорожным движением на пересечениях улиц, на которых интенсивность движения транспорта часто изменяется в течение суток. К устройствам данного типа относятся контроллеры ДКМ4-4.
Дорожные контроллеры для АСУД. Эта группа контроллеров осуществляет переключение светофорных сигналов в зависимости от управляющих воздействий УП и включает следующие типы:
программные контроллеры, осуществляющие переключение светофорной сигнализации по одной из нескольких заранее заданных временных программ. Все дорожные контроллеры подключены к магистральному каналу связи, а инициатором начального момента включения программы являются устройства управляющего пункта, таймер или непосредственно один из контроллеров. К устройствам данного типа относятся модификации ДКС;
контроллеры непосредственного подчинения, осуществляющие переключение светофорной сигнализации по командам из управляющего пункта. Каждый из контроллеров связан с управляющим пунктом отдельной телефонной линией, по которой получает управляющие воздействия и сигнализирует о режиме функционирования и состоянии светофорного объекта. В ряде контроллеров заложена возможность коррекции управляющих воздействий в зависимости от реальной ситуации, сложившейся в данный момент времени на перекрёстке. К контроллерам непосредственного подчинения относятся модификации ДКС, ДКП, КДУ и др.
Детекторы транспорта для определения характеристик транспортного потока. Данный класс устройств подразделяется на следующие типы:
детекторы проходные, которые выдают сигнал при появлении транспортной единицы в контролируемой зоне, причём параметры сигнала не зависят от времени нахождения и направления движения транспортных единиц. К таким детекторам относится ДТ-ИК;
детекторы присутствия, обеспечивающие выдачу сигнала в течение всего времени нахождения транспортных единиц в контролируемой зоне.
Кним относится ДТ-ИК-П;
детекторы скорости, обеспечивающие выдачу сигнала в течение времени прохождения транспортных единиц между зонами действия двух детекторов, установленных на одной полосе движения при фиксированном расстоянии между ними. К таким детекторам относится ДТ-ИК-С;
детекторы состава потока, которые формируют сигналы прохождения транспортных единиц с разделением их по типам автомобилей. К ним относится ДТ-ИК-СП;
30