

БЭМЗ полищук доки / 2020 / Оборудование / ДИССЕРТАЦИЯ ВАК для нац библиотеки Савчук
.pdf,м
1 – Q = 0,001 м3/с; 2 – Q = 0,002 м3/с
Рисунок 3.43. – Влияние производительности насоса на величину отклонения глубины обработки почвы
Как следует из анализа приведенной зависимости, величина потока рабочей жидкости Q от насоса не оказывает влияния на значение статического отклонения глубины обработки почвы и точность высотного позиционирования.
и точность высотного позиционирования.
3.3 Выводы по главе
Математическое описание процесса функционирования электрогидравлического привода выполнено с учетом принятых допущений в виде обыкновенных дифференциальных уравнений при заданных начальных и граничных условиях, а также алгебраических уравнений баланса потоков рабочей жидкости в узлах гидросистемы. При этом коэффициент диссипации энергии, учитывающий податливость напорного трубопровода и сжимаемость рабочей жидкости в силовом гидроцилиндре, определяет форму дифференциального уравнения первого рода для вычисления величины изменения давления в гидросистеме. Изменение управляющих токов характеризуется инерционностью процессов их протекания, определяемых величиной индуктивности обмоток электромагнитов. Приведенные масса и весовые нагрузки в условиях вязкого трения при движении штока силового гидроцилиндра определяют форму дифференциального уравнения второго рода, описывающего его движение под действием давления рабочей жидкости в напорной линии насоса.
Вынужденные колебания остова машины, сопровождающие коррекции положения рабочих органов при кинематических возмущающих воздействиях, имеют вид затухающих процессов, характер протекания которых указывает на устойчивость замкнутой системы высотного регулирования. Результаты исследований показывают точность копирования рельефа поля рабочими органами, соответст-
71
вующую агротехническим требованиям соблюдения глубины обработки почвы в пределах ± 0,01 м.
72
ГЛАВА 4 ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
4.1 Разработка стенда с имитацией возмущающих воздействий
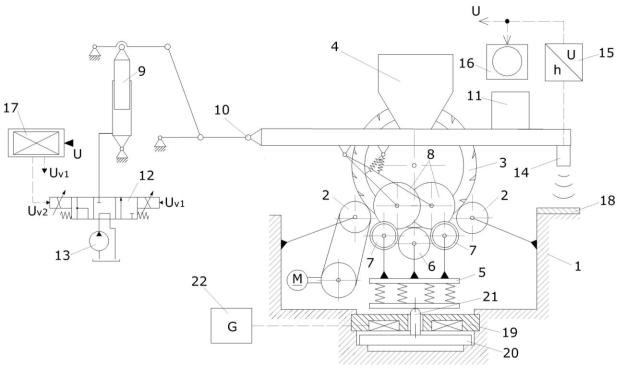
С целью исследования компонентов системы управления рабочими органами посевного агрегата, разработан стенд [2–А, 8–А, 19–А], функциональная схема которого изображена на рисунке 4.1.
Рисунок 4.1. – Функциональная схема стенда
Стенд содержит раму 1 с установленными на ней роликами 2, один из которых предназначен для вращения опорно-приводных колес 3 сеялки 4 и имеет кинематическую связь с электродвигателем М, подпружиненную виброплощадку 5, на которой установлены опорный ролик 6 и устройство имитации сопротивления почвы 7, кинематически связанное с сошниками 8 сеялки 4, исполнительный механизм 9 гидрофицированного навесного устройства, кинематически соединенный посредством соединительного звена 10 с остовом сеялки 4 и грузом 11, а гидравлически – посредством электрогидравлического регулятора 12 с насосом 13, ультразвуковой датчик 14 высотного регулирования, включающий преобразователь 15, а также осциллограф 16 и контроллер 17, плоский горизонтальный экран 18, закрепленный на раме 1 стенда под указанным датчиком 14. Кроме того, на раме 1 стенда также установлен электромагнит 19 постоянного тока с цилиндри-
73
ческим магнитопроводом, в зоне действия которого расположен плоский якорь 20 из ферромагнитного материала с толкателем 21, кинематически связанным с подпружиненной виброплощадкой 5, причем электромагнит 19 электрически подключен к источнику 22, или G пульсирующего тока, а контроллер 17 – к электромагнитам электрогидравлического регулятора 12.
При проведении лабораторных испытаний сеялка 4 с грузом 11 устанавливается опорно-приводными колесами 3 на ролики 2 и посредством соединительного звена 10 кинематически связывается с исполнительным механизмом 9 гидрофицированного навесного устройства. Сошники 8 при этом должны кинематически взаимодействовать с элементами устройства имитации сопротивления почвы 7. От источника 22, или G пульсирующего тока на электромагнит 19 поступает управляющее воздействие заданной формы и величины, вследствие чего плоский якорь 20 начинает перемещаться, передавая тяговое усилие через толкатель 21 на подпружиненную виброплощадку 5. Последняя через опорный ролик 6 сообщает вертикальные перемещения вращающемуся от электродвигателя М посредством кинематической связи с роликами 2 опорно-приводному колесу 3 и остову сеялки 4. При этом расстояние h между плоским горизонтальным экраном 18 и ультразвуковым датчиком 14 высотного регулирования изменяется, что приводит к девиации сигнала U в цепи обратной связи, который обрабатывается посредством преобразователя 15 и поступает в контроллер 17, а также в осциллограф 16 для регистрации рабочих процессов. В зависимости от заданной высоты положения остова сеялки 4 контролер 17 вырабатывает управляющие воздействия UV1 и UV2 для электрогидравлического регулятора 12, посредством которого осуществляется подача рабочей жидкости от насоса 13 в исполнительный механизм 9 гидрофицированного навесного устройства или выпуск ее в гидробак. Таким образом происходит высотное регулирование положения рабочих органов.
Бесконтактное взаимодействие электромагнитного привода с подпружиненной виброплощадкой посредством плоского якоря обеспечивает имитацию кинематических возмущений со стороны рельефа поля, а силовое сопротивление почвы воспроизводится за счет регулируемых сил трения со стороны фрикционов на рабочие органы.
Использование стенда обеспечивает условия функционирования объекта испытаний для получения его статических и динамических характеристик, а также снижение затрат и сроков на испытания и доводку систем высотного регулирования рабочих органов в межсезонный период.
Для обеспечения реализации формирования нагрузок на объект испытаний в широком диапазоне возмущающих воздействий целесообразно использовать электромагнитный привод с большим тяговым усилием, имеющий цилиндрическую форму магнитопровода, плоский якорь и подключенный к источнику пуль-
74
сирующего тока. Конструкционный фактор, характеризующий форму магнитной системы, определяется из следующего соотношения [76]
Kф |
Nн |
, |
|
S |
|||
|
|
где Nн – начальное тяговое усилие; S – рабочий ход.
Измерение переменной высоты расположения рабочих органов осуществляется путем закрепления на раме стенда плоского экрана, расположенного горизонтально под ультразвуковым датчиком измерения расстояния.
Обобщенный показатель магнитной системы электромагнитного привода указанного стенда оценивается коэффициентом добротности согласно формуле
[76]
K Д |
A |
|
, |
|
|
||
G P |
|
||
|
t |
||
где А – совершенная работа; G – масса; Р – потребляемая мощность; t – значение превышения температуры катушки над температурой окружающей среды
Приведенные количественные показатели являются критериями при выборе электромагнита для комплектации стенда, причем чем больше их значения, тем лучше сконструирована магнитная система.
Проведение достоверных испытаний указанных средств является весьма актуальной научно-технической задачей. При их проектировании, отработке, эксплуатации и серийном производстве испытаниям отводится особая роль. Во многих случаях оказывается, что подавляющая часть затрат на создание этих объектов приходится именно на проведение испытаний [77].
Испытания должны обеспечить нахождение истинного значения параметра или характеристики не при тех реальных условиях, в которых он фактически может находиться в ходе испытаний, а в заданных номинальных условиях испытаний. Реальные условия испытаний практически всегда отличаются от номинальных, поскольку установить параметры их условий абсолютно точно невозможно. Следовательно, результаты испытаний всегда имеют погрешность, возникающую не только вследствие неточного определения искомой характеристики, но и из-за неточного установления номинальных условий испытаний [78].
При проведении эксперимента указанная неточность определяется также погрешностью датчиков механических величин, которая равна разности для различных оценок [79]:
x xИ x, x x / x, xmax / xmax ,
где х, γх и γ – абсолютная, относительная и приведенная погрешности; хИ – измеренное значение; х – истинное значение измеряемой величины.
Способы нормирования погрешностей измерительных преобразователей датчиков учитывают характер погрешности: погрешность нуля (аддитивная), по-
75
грешность чувствительности (мультипликативная), а также суммарное воздействие погрешностей нуля и чувствительности. Поэтому расчет основной погрешности выполняется по данным лабораторных экспериментальных исследований с использованием эталонных средств измерения. При этом нелинейные функции преобразования сигналов, отражающие, например гистерезис и нелинейность, аппроксимируются линейными зависимостями. Согласно сравнению указанных функций определяется основная погрешность измерительного преобразователя, которая определяет одну из основных технических характеристик датчика. Для ультразвукового датчика расстояния производства ОАО «Измеритель» основная погрешность приведена в его технических характеристиках (см. раздел 2.2).
Условия эксплуатации технологического оборудования мобильных машин весьма разнообразны и отличаются широким спектром возмущающих воздействий. Влияние внешних факторов на качество функционирования электрогидравлического привода в составе системы высотного регулирования целесообразно оценить на основе многофакторного анализа в локальной области указанных факторов, причем разработанная методика должна отражать последовательность действий при планировании эксперимента. Выходной величиной интерполяционной модели является высота расположения ультразвукового датчика, закрепленного на остове сеялки, над плоским горизонтальным экраном,
4.2 Методика и результаты лабораторных исследований
Объект исследования: процесс функционирования электрогидравлического привода рабочих органов мобильной машины.
Цель исследования: определение функциональной зависимости соблюдения точности глубины обработки почвы от параметров кинематических и силовых возмущающих факторов.
Факторы, определяющие процесс:  1 – амплитуда гармонического закона, м;
1 – амплитуда гармонического закона, м;  2 – период гармонического закона, с;
2 – период гармонического закона, с;  3 – обобщенная жесткость резиновых шин, Н/м.
3 – обобщенная жесткость резиновых шин, Н/м.
Подготовка стенда для проведения испытаний:
-установить сеялку 4 (см. рисунок 4.1) с грузом 11 и компонентами системы высотного регулирования (электрогидравлический регулятор 12, ультразвуковой датчик расстояния 14, контроллер 17) на стенде согласно схеме (см. рисунок
4.1);
-включить привод насосной установки 13, питание системы высотного регулирования и при помощи пульта управления контроллера 17, электрогидравлического регулятора 12, а также исполнительного механизма 9 установить горизонтальное положение остова сеялки 4 относительно плоского экрана 18;
76

-включить электродвигатель М привода ролика 2 для вращения опорноприводных колес сеялки 4.
-с помощью устройства имитации сопротивления почвы 7 и цифрового динамометра (на схеме не показан), расположенного в районе соединительного звена 10, установить необходимую величину тягового сопротивления, действующего на сошники;
-привести в действие источник 22, или G пульсирующего тока;
-включить контрольно-измерительную аппаратуру стенда, посредством преобразователя 15 и осциллографа 16 зафиксировать выходной сигнал U ультразвукового датчика 14;
-определить амплитуду и частоту кинематического возмущения по полученной осциллограмме рабочего процесса для разомкнутой системы регулирования. При необходимости с помощью источника 22, или G пульсирующего тока произвести корректировку параметров указанных возмущений до требуемых;
Выбор основного уровня и интервалов варьирования. Для того, чтобы вы-
брать уровни факторов следует проанализировать литературные и эксплуатационные данные. Согласно нормативным документам выбираем основные уровни и
интервалы варьирования факторов:  1 = 0,0225 м и I1 = 0,0075 м;
1 = 0,0225 м и I1 = 0,0075 м;  2 = 3 с и I2 = 1 с;
2 = 3 с и I2 = 1 с;
 3 = 5,5∙105 Н/м и I3 = 1∙105 Н/м.
3 = 5,5∙105 Н/м и I3 = 1∙105 Н/м.
На основании анализа приведенных данных выбраны следующие основные уровни и интервалы варьирования для факторов [80, 81], соответствующих области проведения эксперимента (таблица 4.1): амплитуда и период кинематического возмущения со стороны подпружиненной виброплощадки стенда, а также обобщенная жесткость резиновых шин.
Таблица 4.1. – Основные уровни и интервалы варьирования факторов
|
Фактор, размерность |
Уровень фактора |
Интервал |
||
|
-1 |
0 |
+1 |
варьирования |
|
|
|
||||
1 |
– амплитуда, м |
0,015 |
0,0225 |
0,03 |
0,0075 |
2 |
– период, с |
2 |
3 |
4 |
1 |
3 |
– жесткость, Н/м |
4,5∙105 |
5,5∙105 |
6,5∙105 |
1∙105 |
Составление матрицы планирования эксперимента и обработка его результатов:
- определить условия проведения эксперимента в виде матрицы планирования (таблица 4.2), где строки соответствуют различным опытам, а столбцы – значениям факторов. Количество опытов, необходимых для реализации всех возможных сочетаний для двух уровней факторов, соответствует выражению
N=2k,
где k – количество факторов.
77
Таблица 4.2. – Матрица планирования и результаты вычислительного эксперимента
Номер |
|
Факторы |
|
|
|
|
Отклик |
|
|
||
опыта |
* |
х1 |
х2 |
х3 |
' |
'' |
** |
|
*** |
2 |
**** |
х0 |
yа |
yа |
|
|
y |
( y) |
|
||||
1 |
+ |
- |
- |
+ |
8,06 |
8,06 |
8,06 |
|
0 |
0 |
0 |
2 |
+ |
- |
+ |
- |
4,48 |
4,49 |
4,485 |
|
-0.005 |
2,5· |
5· |
3 |
+ |
+ |
- |
- |
21,9 |
21,8 |
21,85 |
|
0.05 |
0,0025 |
0,005 |
4 |
+ |
+ |
+ |
+ |
7,84 |
7,82 |
7,83 |
|
0.01 |
1· |
2· |
5 |
+ |
- |
- |
- |
8,73 |
8,73 |
8,73 |
|
0 |
0 |
0 |
6 |
+ |
- |
+ |
+ |
3,97 |
3,95 |
3,96 |
|
0.01 |
1· |
2· |
7 |
+ |
+ |
- |
+ |
19,87 |
19,86 |
19,865 |
|
0.005 |
2,5· |
5· |
8 |
+ |
+ |
+ |
- |
8,44 |
8,42 |
8,43 |
|
0.01 |
1· |
2· |
bj |
10,4 |
4,093 |
4,228 |
- 0,473 |
|
|
|
|
|
0.00285 |
|
Примечания: * вектор-столбец фиктивной кодированной переменной х0; среднее значение откликов yа' и yа'' (коэффициентов вариации высоты расположения ультразвукового датчика); *** разность между значением отклика в каждом опыте и средним значением; **** дисперсия в каждом опыте;
-определить коэффициент вариации высоты расположения ультразвукового датчика над плоским горизонтальным экраном стенда по выражению (3.8).
-определить по результатам эксперимента коэффициенты регрессии с использованием вычислительного метода наименьших квадратов, являющиеся частными производными функции отклика по соответствующим переменным:
|
N |
|
N |
|
|
|
N |
|
|
|
yi |
|
|
yi (xj )i |
|
|
yi (x j xu )i |
||
b0 |
i 1 |
; bj |
i 1 |
|
; |
bju |
i 1 |
|
; |
N |
|
|
|
|
|||||
|
|
|
N |
|
|
N |
|||
-выполнить кодирование значения внешнего фактора согласно формуле
~~
xj x j I j x j 0 ,
где x j , x j 0 – натуральные значения фактора и уровня соответственно; Ij – интервал варьирования;
- составить уравнение регрессии в виде полинома
k |
|
|
|
k |
|
|
|
k |
|
|
|
(4.2) |
y b |
b |
x |
j |
b |
ju |
x |
x |
b |
j j |
x2 |
, |
|
0 |
j |
|
|
|
j u |
|
j |
|
|
|||
j |
1 |
|
|
j,u |
|
|
|
j 1 |
|
|
|
|
|
|
|
|
j u |
|
|
|
|
|
|
|
|
где bj - основной эффект; bju - парные взаимодействия; b0 - коэффициент регрессии; bjj - квадратичные эффекты; xj и xu - кодированные значения помех; у - функция отклика.
При этом согласно таблице 4.2 уравнение регрессии имеет вид ya 10,4x0 4,093x1 4,228x2 0,473x3.
78
Определение адекватности модели путем фиксирования области проведения эксперимента и последовательного повышения степени полинома:
-определить число степеней свободы для полного факторного эксперимента
илинейного уравнения регрессии
f N (k 1);
- определить дисперсию адекватности по выражению
N
yi2
2 |
i 1 |
|
|
sад |
|
|
, |
|
|
||
|
|
f |
|
где i = 1,2…,N;
- определить дисперсию в каждом опыте с учетом числа повторных наблюдений n согласно формуле
|
|
n |
y 2 |
|
|
|
yq |
||
s |
2 |
i |
|
, |
|
n |
1 |
||
|
|
|
||
где q=1,2,…,n; yq – значение отклика для повторных опытов;
- подтвердить гипотезу об однородности дисперсий с учетом значений максимальной дисперсии в опыте N=3 (см. таблицу 4.2), определив значение критерия Кохрена по выражению
s2
G max
N
si2
1
с учетом результатов вычислений для проверки гипотезы об однородности дисперсий [80]: f = 4; sад2 = 0,72∙10-3; G = 0,03 (табличное значение GТ = 0,68), причем однородность дисперсий подтверждается согласно соотношению
GGТ ;
-определить дисперсию воспроизводимости по формуле
|
|
|
N |
2 |
|
|
|
|
|
|
|
|
2 |
|
yiq yi |
||
s |
2 |
|
1 |
|
; |
y |
|
|
|||
|
|
|
|
N |
|
-определить значение F - критерия Фишера при 5%-ном уровне значимости
[81]согласно отношению
s2
F ад .
s2y
79

с учетом результатов вычислений для проверки гипотезы об адекватности модели
s2 |
0,71 10 3; F=1 (табличное значение FТ=6,4 при 5%-ном уровне значимости), |
y |
|
причем адекватность модели подтверждается согласно соотношению
F FТ .
Проверка значимости коэффициентов регрессии:
- определить дисперсию коэффициента согласно отношению
|
|
s2 |
|
s2 |
|
y |
; |
|
|
||
b |
j |
N |
|
|
|
|
|
- определить доверительный интервал из выражения
bj |
t s bj |
при доверительной вероятности 99,9% критерий Стьюдента [80] t = 8,61, причем доверительный интервал задается верхней и нижней границами:
bj bj , bj bj ,
где bj 7,7·10-4 , поэтому каждый коэффициент регрессии значим, т.к. его абсо-
лютная величина больше доверительного интервала.
Анализ уравнения регрессии показывает влияние его коэффициентов, соответствующих возмущающим воздействиям (амплитуда и период) и конструкционным факторам (обобщенная жесткость резиновых шин), на функцию отклика в зависимости от их величины и знака.
Максимальная урожайность зерновых культур при минимальных затратах связана с тяговым сопротивлением агрегата и точным распределением семян по глубине и площади посева [3]. С учетом вышеприведенного положения предлага-
ется комплексный критерий оценки качества процесса функционирования элек-
трогидравлического привода рабочих органов технологического оборудования мобильной машины, содержащий агротехническую и динамическую составляющие [3–А, 11–А]. При этом указанный критерий выражен через их сумму согласно формуле
Va (1 )VR , |
(4.1) |
где α – весовой коэффициент, определенный согласно неравенству 0 ≤ α ≤1;
Vа и VR – коэффициенты вариации глубины обработки почвы и тягового сопротивления рабочих органов.
Приведенная методика позволяет получить достоверную оценку динамических свойств, или качества функционирования электрогидравлического привода в составе системы высотного регулирования. При этом с помощью интерполяцион-
80