

БЭМЗ полищук доки / 2020 / Оборудование / ДИССЕРТАЦИЯ ВАК для нац библиотеки Савчук
.pdfвание рельефа поверхности с использованием механических средств измерения имеет высокую погрешность, что снижает качество копирования.
Создание систем высотного регулирования положения навесного устройства путем бесконтактного копирования рельефа поверхности на основе акустических средств измерения расстояния является перспективным направлением. Поэтому весьма актуальным является решение научно-практической задачи – выявлению закономерностей и связей параметров электрогидравлического привода с показателями качества процесса копирования рельефа поверхности, обоснованию
ивыбору рациональных значений указанных параметров с использованием математического моделирования и многофакторного анализа, разработке электрогидравлического привода с использованием бесконтактных средств измерения расстояния, при которых обеспечивается догрузка ведущих колес тягового средства.
Экспериментальную доводку опытных образцов посевных агрегатов технически и экономически целесообразно выполнять в межсезонный период с использованием лабораторного оборудования. Причем известные конструкции испытательных стендов не позволяют проводить исследования посевных агрегатов, оборудованных системами автоматического регулирования положения рабочих органов. В связи с этим необходимо разработать методические положения испытаний
иконструкцию стенда, позволяющую исследовать рабочие процессы в электрогидравлических приводах посевных агрегатов при бесконтактном копировании рельефа и испытывать их компоненты в условиях, приближенных по характеру и величине возмущений к реальным условиям эксплуатации.
31
ГЛАВА 2 ОПРЕДЕЛЕНИЕ СТРУКТУРЫ И ПАРАМЕТРОВ
ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРИВОДА
2.1 Обоснование принципа высотного регулирования
Современные технологии обработки почвы обеспечивают высокопроизводительные длиннобазовые машины, агрегатируемые с энергонасыщенными тяговыми средствами. При этом догрузка задних ведущих колес тягового средства возможна при высотном позиционировании соединительного устройства агрегата без опорного колеса на раме мобильной машины.
Приводы рабочих органов комбинированных почвообрабатывающих агрегатов, структура которых не содержит специальных средств копирования рельефа поля, имеют эксплуатационные особенности при выполнении посевных операций. Навесное устройство трактора, кинематически связанное посредством соединительного звена с остовом машины, фиксируется в заданном положении с автоматической компенсацией возможных утечек рабочей жидкости из силовых гидроцилиндров привода с использованием позиционного контура регулирования. При выполнении почвообрабатывающих и посевных операций необходимо обеспечивать плоскопараллельное движение указанного остова относительно почвы. Про- дольно-угловые колебания трактора, вызванные рельефом поверхности, передаются на остов и обусловливают его колебания относительно опорнотранспортного колеса в зоне рабочих органов, которые не обеспечивают поддержание глубины в заданных пределах.
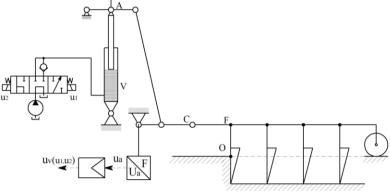
На рисунке 2.1 отражена схема электрогидравлического привода длиннобазового орудия пахотного агрегата, не содержащего опорное колесо в районе соединительного устройства с целью увеличения сцепного веса тягового средства.
Рисунок 2.1. – Схема электрогидравлического привода рабочих органов с силовым регулированием глубины пахоты
Структура этого привода построена по принципу силового регулирования
32
глубины пахоты, которая устанавливается в зависимости от удельной плотности почвы. Тяговое сопротивление F измеряется силоизмерительным датчиком с выходным сигналом Ua, который поступает на вход микропроцессорного контроллера. Регулятор в составе электрогидравлического привода при помощи управляющих сигналов UV(U1;U2) определяет скорость штока силового гидроцилиндра А с рабочим объемом V. В этом случае посредством соединительного устройства С длиннобазовая мобильная машина устанавливает глубину вспашки согласно высоте FO остова указанной машины над рельефа поля. Однако в этом случае рабочие органы со стороны соединительного устройства не могут реализовать агротехнические требования по глубине обработки почвы из-за ее неравномерной плотности и продольно-угловых колебаний остова трактора.
Существующие способы копирования рельефа поля для соблюдения агротехнических требований при выполнении почвообрабатывающих операций посевными агрегатами предполагают использование контактных средств в виде опорно-копирующих пневматических колес, что сопровождается увеличением тягового сопротивления и повреждением поверхности почвы в опорной зоне указанных колес.
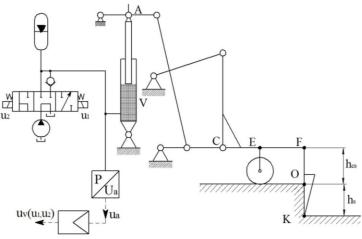
Из известных решений способ догрузки ведущих колес при контактном копировании рельефа поля предполагает осуществление стабилизации подпора рабочей жидкости в полости подъема силового гидроцилиндра, сообщенной с гидроаккумулятором (рисунок 2.2).
Рисунок 2.2. – Схема электрогидравлического привода рабочих органов
свысотным регулированием глубины пахоты
Вданном случае при работе гидравлической системы трактора в указанной полости V создается давление рабочей жидкости р, достаточное для снижения реакции на опорное колесо со стороны почвы. Величина указанного давления недостаточна для подъема орудия, поэтому копирование рельефа почвы опорным
33
колесом не нарушается. При этом происходит догрузка ведущих колес тягового средства, что сопровождается увеличением его сцепного веса.
Давление р измеряется датчиком давления с выходным сигналом Ua, который обрабатывается контроллером с управляющим воздействием UV (U1;U2) на электромагниты регулятора электрогидравлического привода. Это определяет величину и знак коррекции давления р согласно соответствующему оператору. Шток гидроцилиндра А кинематически связан посредством соединительного звена С навесного устройства с орудием. В этом случае высота остова орудия над почвой ОF соответствует параметру hcs при глубине обработки ОК с параметром hs. Недостатком указанного способа является необходимость контура обратной связи по давлению и дополнительного конструкционного элемента в виде гидроаккумулятора [15].
В системах активного управления тракторных агрегатов зарубежные производители применяют высотные датчики, например, ультразвуковые датчики расстояния, которые не имеют недостатков механических копирующих устройств. Например, для обеспечения точности смыкания борозд при пахоте полунавесными оборотными плугами фирмы «Lemken» используется автоматическая система управления, содержащая три указанных датчика. С их помощью осуществляется непрерывное сканирование кромки борозды с целью определения соответствующего расстояния. Контроллер обрабатывает результаты измерения, согласно которым посредством электрогидравлического регулятора и силовых гидроцилиндров регулируется положение плуга в горизонтальной плоскости относительно кромки борозды [11]. Приведенные примеры практического использования бесконтактного способа копирования рельефа поля указывают на перспективность применения ультразвуковых датчиков расстояния.
2.2 Составление схемы динамической системы
Машины, используемые на посевных операциях, имеют почвообрабатывающую часть, состоящую из нескольких рядов дисков, задние опорные колеса, которые выполняют роль транспортных опор, а также участвуют в рабочем процессе, осуществляя функцию предварительного прикатывания и подуплотнения почвы в районе семенного ложа. После задних опорных колес установлена сошниковая группа, состоящая из двух рядов сошников. Задние прикатывающие катки выполняют задачу послепосевного прикатывания для прижатия высеваемых семян к сформированному семенному ложу для обеспечения дружности всходов.
В случае установки опорных колес в зоне соединительного устройства машины с тяговым средством обеспечивается подготовка почвы и высев семян путем контактного копирования рельефа поля. Однако в этом случае увеличивается металлоемкость конструкции посевного агрегата и его стоимость [4–A, 5–A]. По-
34
этому для копирования рельефа поля возможно применить контур высотного регулирования системы управления навесным устройством трактора с высотным датчиком в цепи обратной связи, не содержащий упомянутых опорных колес [12–A]. Указанный датчик можно установить на раме посевного агрегата в районе оси подвеса или за рабочей зоной сошников.
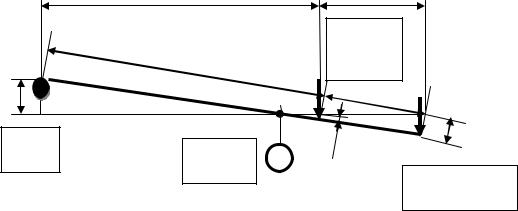
Электрогидравлический привод рабочих органов мобильной машины должен обеспечивать ее плоскопараллельное движение относительно почвы. Неровности почвы обусловливают продольно-угловые колебания тягового средства, передающиеся через соединительное устройство на несущую раму, которая начинает совершать колебания относительно приводного колеса в зоне рабочих органов. При этом рабочие органы, расположенные в несколько рядов на разном расстоянии относительно этого колеса начинают заглубляться или выглубляться в зависимости от текущего положения несущей рамы на различную глубину (рисунок 2.3). Соответственно между передним и задним рядами почвообрабатывающей или высевающей части возникает разница в глубине обработки. Величину разности глубины заделки семян для двух рядов рабочих органов можно определить из подобия соответствующих треугольников. Линейным размером g в виду его малости можно пренебречь. Для существующих конструкций мобильных машин размер g = 0,2е, а а=3b, поэтому e=f/3.
|
с |
d |
|
|
Рабочие |
|
а |
органы |
|
1 ряд |
|
|
|
|
f |
|
b |
|
|
|
Соедини- |
|
е |
тельное |
Опорное |
g |
устройство |
||
|
колесо |
|
Рабочие органы 2 ряд
Рисунок 2.3. – Схема расположения рабочих органов в контуре силовой проводки электрогидравлического привода
При отклонении соединительного устройства в вертикальной плоскости на 15 мм отклонение глубины обработки (высева) второго ряда относительно оси подвеса составит 5 мм. В условиях реального рельефа почвы и погрешностях предшествующей обработки по экспериментальным данным колебания соединительного устройства могут составлять до 200 мм. Так как глубина заделки семян составляет в условиях Республики Беларусь от 1,0 до 5,0 мм в зависимости от высеваемых культур, отклонение средней глубины обработки составляет ±1,0 см.
35
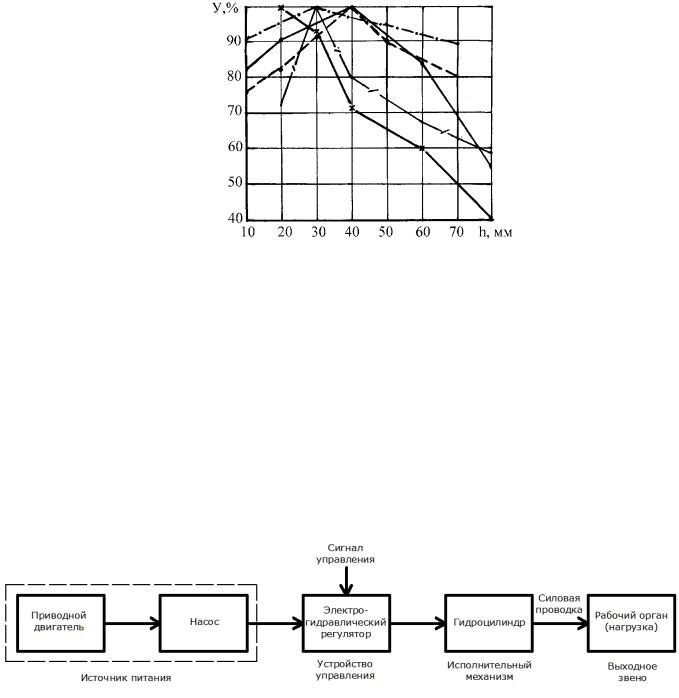
Посев с отклонением от заданной оптимальной глубины ведет к резкому снижению продуктивности растений (рисунок 2.4).
— - тритикале; — ∙ — - озимая рожь; — / — - пшеница; — - ячмень; — х — - овес Рисунок 2.4. – Влияние глубины заделки семян зерновых культур на их
урожайность
Согласно данным исследований [4] отклонение от оптимальной глубины h сева зерновых культур на 10 мм приведет к снижению полевой всхожести в зависимости от высеваемой культуры на 5…10%. При этом снижение урожайности Y происходит более интенсивно – на 10…30% (см. рисунок 2.4). Поэтому качество функционирования электрогидравлического привода рабочих органов определяется точностью копирования рельефа поля.
Функциональная схема указанного электрогидравлического привода изображена на рисунке 2.5. Электрогидравлический привод обеспечивает управление
Рисунок 2.5 – Функциональная схема электрогидравлического привода рабочих органов мобильной машины
рабочими органами, герметичность рабочих гидролиний в нейтральном положении распределительных элементов, независимость скорости подъема навесного устройства от веса агрегатируемого орудия при ее изменении пропорционально величине тока управления на обмотке электромагнита. Указанная схема отражает построение основных компонентов электрогидравлического привода, располо-
36
женных на тракторе и в цепи силовой проводки машины. Сигнал управления от внешнего воздействия подается на электрогидравлический регулятор, приводимый в действие от источника питания. Далее управляющее воздействие передается на исполнительный механизм, который корректирует положение рабочих органов через жесткую силовую проводку (несущая рама, каркас и т.д.).
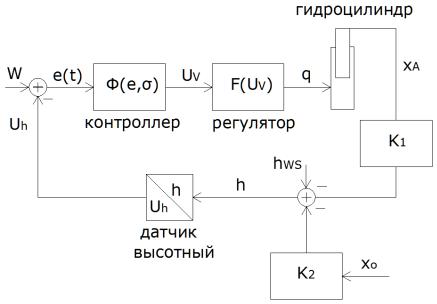
Блок-схема замкнутой системы регулирования высоты расположения остова мобильной машины, например посевного агрегата, над поверхностью поля изображена на рисунке 2.6. Кинематическое возмущение х0 со стороны поверхности
Рисунок 2.6 – Блок-схема системы высотного регулирования рабочих органов мобильной машины
поля и исполнительное перемещение гидроцилиндра хА соответственно через коэффициенты передач K2 и K1 определяют высоту h, измеряемую с использованием акустических средств c выходным сигналом Uh. Этот сигнал обратной связи сравнивается с задающим воздействием W, что определяет рассогласование в системе регулирования е(t). Микропроцессорный контроллер согласно оператору Ф(е, σ) формирует управляющее воздействие Uv на основе соответствующего алгоритма. Электрогидравлический регулятор с передаточной функцией F(Uv) реализует коррекцию положения штока гидроцилиндра посредством потока рабочей жидкости q [9–А].
На рисунке 2.7 показано расположение и соединение компонентов электрогидравлической системы управления навесным устройством и внешними потребителями на посевном агрегате. Приведенная система содержит насос переменной подачи 1 тракторной гидросистемы, напорная магистраль которого соединена с гидроблоком 2, имеющего распределительные секции внешних потребителей и
37
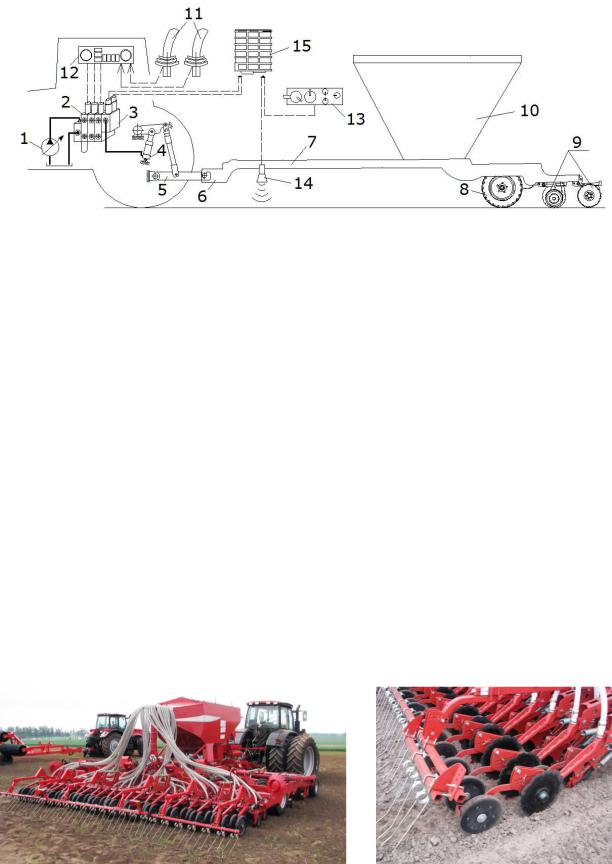
Рисунок 2.7. – Электрогидравлическая система управления внешними потребителями и навесным устройством
электрогидравлический регулятор 3 навесного устройства, кинематически связанного с гидроцилиндром 4 и нижними тягами 5. Устройство 6 соединяет указанные тяги 5 с остовом 7 сеялки, базируемой на опорно-приводных колесах 8 и имеющей рабочие органы (сошники) 9 и бункер 10. Ручное управление внешними потребителями, содержащими исполнительные механизмы привода технологического оборудования посевного агрегата, осуществляется посредством джойстиков 11. Программатор 12 предназначен для автоматического выполнения заданной последовательности и параметров операций технологического цикла. Контур высотного регулирования положения навесного устройства указанной системы содержит пульт управления 13, ультразвуковой датчик расстояния 14, измеряющий высоту расположения остова 7 сеялки над рельефом поля в районе соединительного устройства 6, а также контроллер 15 для формирования управляющих воздействий согласно алгоритму управления (см. рисунок 2.6).
На рисунке 2.8 изображен общий вид посевного агрегата АППМ-6 с трактором «Беларус».
а) |
б) |
а – посевной агрегат; б – рабочие органы (дисковые сошники) Рисунок 2.8. – Общий вид посевного агрегата
38
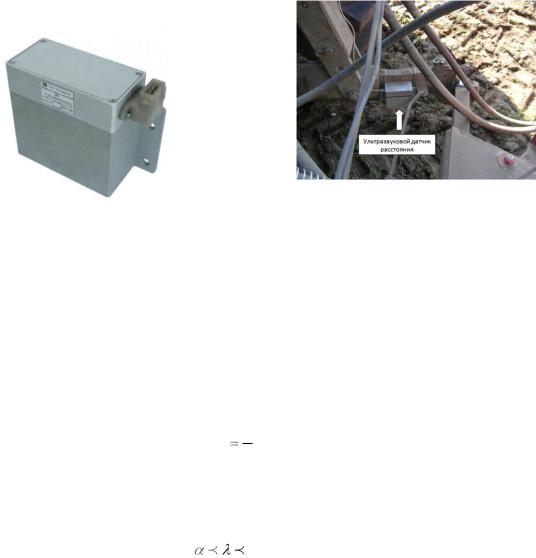
Общий вид ультразвукового датчика расстояния и его расположение на нижней тяге навесного устройства трактора показаны на рисунке 2.9.
а) |
б) |
а– общий вид датчика; б – расположение датчика на нижней тяге трактора Рисунок 2.9. – Ультразвуковой датчик расстояния в контуре высотного
регулирования
Принцип работы указанного датчика, используемого для определения высоты расположения остова мобильной машины над рельефом поля, состоит в том, что ультразвуковой импульс распространяется на расстояние L от излучателя в направлении объекта со скоростью звука c за время t, которое определяется согласно отношению [22, 56]
t Lc .
Указанный способ характеризуется тем, что частота и диаграмма направленности ультразвукового излучения соответствуют длине волны λ, удовлетворяющей неравенству
λ, удовлетворяющей неравенству
b,
где α –размер фрагментов, составляющих дискретную поверхность и определяющих их отражательные свойства; b - размер участка сплошной поверхности с однородным рельефом, определяющий допустимый размер ультразвуковой зоны.
Ниже приведены технические характеристики указанного датчика по данным завода-производителя:
-напряжение питания, В……………………………..9,5
-программируемый диапазон измерения, м………..0,1–2,0
-воспроизводимость, %..............................................0,1
-разрешающая способность, мм……………………..0,35
-основная погрешность измерения, %……………...± 1
-запаздывание, мс……………………………………..63
-степень защиты……………………………………….IP65 по ГОСТ 14254-96
-вид климатического исполнения……………………О1 по ГОСТ 15150
-диапазон рабочих температур,°C ………………….−40–+65.
39

Конструкционной особенностью датчика является раздельное исполнение излучателя и приемника, что позволяет снизить высоту измерения до 0,3 м.
Схема динамической системы для математического описания процесса функционирования электрогидравлического привода в режиме высотного позиционирования отображена на рисунке 2.10. Указанная схема на примере посевного агрегата отражает принцип высотного позиционирования рабочих органов без опорного колеса в районе соединительного устройства.
Расчетная схема для определения приведенных нагрузок и масс
(рисунок 2.10, а) изображает массу мобильной машины Ма и ее весовую нагрузку Gа, а также реакции RBS (точка В) и ROS (точка О), определяемые кинематическими параметрами l1 и l2.
а) |
б) |
в)
а – расчетная схема для определения приведенных нагрузок и масс; б – расчетная схема для определения параметров силовой проводки; в – динамическая модель Рисунок 2.10. – Схема динамической системы электрогидравлического привода рабочих органов
40