

БЭМЗ полищук доки / 2020 / Оборудование / ДИССЕРТАЦИЯ ВАК для нац библиотеки Савчук
.pdfПри этом из расчета статически определимой балки величины опорных реакций получены по выражениям:
R |
Gal2 |
и R |
Gal1 |
. |
OS |
l1 l2 |
BS |
l1 l2 |
|
|
|
|||
Указанные реакции отражают распределение весовой нагрузки Gа по опорам В и О согласно следующим формулам:
GB RBS , GО RОS .
Коэффициенты передачи при распределении весовых нагрузок по опорам остова мобильной машины равны следующим отношениям:
k |
aB |
GB |
и k |
aO |
GO |
. |
|
|
|||||
|
Ga |
|
Ga |
|||
|
|
|
|
|||
Приведенные массы в указанных точках определены с учетом указанных коэффициентов из условия баланса кинетической энергии объекта, движущегося по разным траекториям [57, 58]:
M B kaB2 M a , MO kaO2 M a .
На рисунке 2.10, в показана динамическая модель привода с указанием кинематических связей, весовых нагрузок, диссипативных и конструкционных параметров, а также перемещений характерных точек остова при его смещении из исходного положения в равновесное, или статическое (индекс «S»). Согласно приведенному рисунку точка В соединительного устройства расположена в установившемся состоянии при отсутствии возмущающих воздействий на высоте hBS при горизонтальном положении нижних тяг трактора. Обозначения сосредоточенных масс МО, МА с векторами их перемещений dх0/dt и dхА/dt, коэффициента вязкого трения λА, а также весовых нагрузок GО, GА позволяет составить математическое описание процесса функционирования электрогидравлического привода при предварительном расчете ее параметров. При этом опора в точке О взаимодействует с рельефом поля, характеризующимся кинематическим возмущением у(t), посредством звеньев с обобщенными жесткостью С и коэффициентом диссипации К резиновых шин. Рабочие органы расположены в установившемся состоянии в соответствие с точкой Е на глубине аS.
Площадь и объем полости обобщенного силового гидроцилиндра электрогидравлического привода с учетом длины напорной магистрали выразим из следующих соотношений:
A 2 4 D2 и V 1,2А xAmax ,
где D – диаметр штока.
41

При перемещении соединительного звена навесного устройства из точки В в точку В', а штока силового гидроцилиндра из точки А в точку А' коэффициент передачи указанного устройства равен отношению соответствующих смещений, определенных графоаналитическим методом (см. рисунок 2.10, в),
kG xBB , xAA
причем xВВ' →0 и xАА' → 0.
Приведенные к штоку силового гидроцилиндра навесного устройства масса и весовая нагрузка согласно условиям равновесия механической системы и баланса кинетической энергии движущегося по разным траекториям объекта соответствуют следующим произведениям:
M |
А |
k 2 M |
В |
и G |
k G . |
|
G |
|
А G В |
Давление рабочей жидкости в силовом гидроцилиндре в установившемся режиме выразим через его конструкционные параметры
pAS GАА .
Обобщенная жесткость опоры в точке О соответствует формуле
СRBS , xOS
– смещение точки О остова из исходного в равновесное, или статическое положение, причем указанное смещение определяется графоаналитическим методом.
Бесконтактный датчик измерения расстояния, установленный за рабочими органами в точке D, которая имеет статическое перемещение xDS, начальную высоту расположения над рельефом поля hDS и условную глубину расположения рабочих органов aDS, вырабатывает выходной электрический сигнал Uh с максимальным значением Uh max, поступающий на контроллер системы управления для формирования управляющих воздействий U1 и U2 при установившемся задающем воздействии W. Приведенным высотным параметрам соответствует обобщенный линейный размер Н [1–A].
Привод содержит насос постоянной подачи Q рабочей жидкости, имеющей объемный модуль упругости Е, а также электроуправляемый посредством напряжений U1 и U2 регулятор c активным сопротивлением электромагнитов R и постоянной времени Т, который позволяет получить переменную скорость движения dхА/dt точки А штока силового гидроцилиндра с диаметром D.
42
2.3 Выводы по главе
Принцип бесконтактного копирования рельефа поверхности основан на его дистанционном сканировании при помощи акустических или других средств измерения расстояния, что позволяет устранить недостатки контактного копирования, заключающиеся в увеличении тягового сопротивления машины, повреждении почвы в зоне опорного контакта и др. Можно предположить, что введение в
структуру электрогидравлического привода рабочих органов средств бесконтактного копирования рельефа поля и компонентов активного управления навесным устройством позволит повысить качество процесса функционирования указанного привода при выполнении современных сельскохозяйственных технологий за счет соблюдения агротехнических требований. При этом достигается снижение металлоемкости, стоимости и упрощение конструкции мобильной машины.
Разработанная динамическая система позволяет упростить математическое описание процесса функционирования электрогидравлического привода рабочих органов путем приведения масс и весовых нагрузок к штоку силового гидроцилиндра указанного привода.
43

ГЛАВА 3 ТЕОРЕТИЧЕСКИЕ ИССЛЕДОВАНИЯ
3.1 Разработка математического описания процесса функционирования электрогидравлического привода
Математическое описание процесса функционирования электрогидравлического привода (см. рисунок 2.10) составлено на основе обыкновенных дифференциальных уравнений при начальных и граничных условиях, а также алгебраических уравнений баланса потоков рабочей жидкости в узлах гидросистемы. При составлении математического описания приняты следующие допущения:
-инерционные силы и вес жидкости пренебрежимо малы;
-гидравлические потери в трубопроводах незначительны;
-нерастворенный воздух в рабочей жидкости отсутствует;
-величина сухого трения в силовом гидроцилиндре незначительна;
-модуль упругости рабочей жидкости является постоянной величиной;
-волновые процессы не влияют на динамику работы системы;
-коэффициенты расхода являются постоянными величинами.
Коэффициент диссипации энергии, учитывающий податливость напорного
трубопровода и сжимаемость рабочей жидкости в силовом гидроцилиндре, соответствует выражению [24, 59]
k kтр |
V |
, |
(3.1) |
|
E |
||||
|
|
|
где kтр – коэффициент податливости трубопровода; Е – модуль упругости рабочей жидкости.
Поэтому приведенный модуль упругости рабочей жидкости с учетом выражения (3.1) равен отношению
Епр |
V |
. |
(3.2) |
|
|||
|
k |
|
|
Минимальная высота расположения точки D остова над рельефом поля с учетом конструкционного параметра H и глубины aDS в статическом положении (см. рисунок 2.10, в) определяется по формуле
hD min H 2аDS .
Максимальные значения токов управления соответствуют закону Ома
i |
U1,2max |
. |
|
||
1,2 max |
R |
|
|
||
Коэффициенты передачи высотного датчика и электроуправляемых золотников регулятора определяются отношениями их выходных электрических сигналов к диапазонам изменения входных величин (высоты и тока управления) [60]:
44
kh |
Uh max |
и kq |
Q |
. |
||
hmax |
hmin |
i1,2max |
||||
|
|
|
||||
Поэтому выражение для вычисления выходного сигнала высотного датчика в виде электрического напряжения соответствует произведению
Uh khhD .
При этом глубина обработки почвы в зоне расположения указанного датчика косвенно определяется как разность (см. рисунок 2.10, в)
aD H hD .
Согласно блок-схеме системы высотного регулирования (см. рисунок 2.6) рассогласование при постоянном задающем воздействии в виде электрического напряжения W и сигнале обратной связи Uh равно разности [61]
e W Uh .
Величину и скорость изменения кинематического возмущающего воздействия со стороны почвы можно описать гармоническим законом:
y(t) |
|
A |
sin |
2 |
|
t ; |
(3.3) |
|||
|
|
|
||||||||
|
|
|
y |
|
|
Ty |
|
|||
|
|
|
|
|
|
|
||||
dy / dt |
A |
2 |
|
cos |
2 |
|
t , |
|||
|
|
|
|
|
|
|||||
|
y Ty |
Ty |
|
|||||||
где Аy, Ty – амплитуда и период при малых и больших возмущающих воздействиях (вблизи и удалении от равновесного состояния), которые получены путем аппроксимации данных полевых измерений неровностей рельефа согласно нормативному документу [62].
Определение показателей качества переходного процесса также проводится при экспоненциальном возмущающем воздействии [63]
|
t |
|
y(t) |
Y (1 e Te ) , |
(3.4) |
где Y – асимптотическое значение возмущающего воздействия; Te – постоянная времени; е – число Эйлера.
Согласно блок-схеме системы высотного регулирования (см. рисунок 2.6) контроллер формирует управляющее воздействие Uv в зависимости от сигнала рассогласования e(t) в соответствии с оператором Ф(е,σ). При допущении, что состояние системы не зависит от предыдущего переключения, указанный оператор описывается следующей нелинейной функцией:
|
k p |
e |
|
, e |
, |
Ф e |
0, |
|
e |
, |
k p tg , |
|
k p |
e |
|
, e |
, |
45
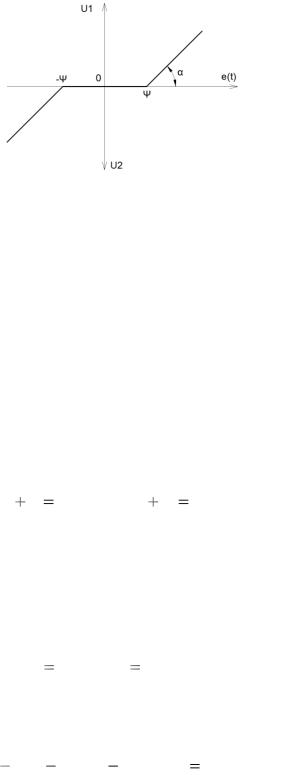
где α – угол наклона статической характеристики; kp – коэффициент пропорциональности; –ψ и ψ – пороги переключения, выбранные из условия обеспечения устойчивости.
На рисунке 3.1 изображена графическая характеристика указанной функции [64, 65], которая описывает пропорциональный закон управления при управляющих сигналах U1(е), U2(е) и зоне нечувствительности е [–ψ; ψ].
Рисунок 3.1. – Графическая характеристика пропорционального закона управления с зоной нечувствительности
Процесс функционирования электрогидравлического привода в составе контура высотного регулирования описывается дифференциальными уравнениями первого и второго рода, причем численное интегрирование дифференциальных уравнений осуществлено методом Рунге - Кутта второго порядка, а программирование выполнено на соответствующем языке в среде MatLab с достаточными графическими возможностями [66].
Изменение токов i1 и i2 в обмотках электромагнитов подъема и опускания регулятора в режиме регулирования положения рабочих органов мобильной машины описываются следующими уравнениями [67]:
Tdi |
|
U |
Tdi |
|
U |
|
||
|
1 |
i |
1 |
и |
2 |
i |
|
2 |
|
dt |
1 |
R |
dt |
2 |
R |
||
|
|
|
||||||
c начальными условиями i1(0)=0, di1/dt (0)=0 и i2(0)=0, di2/dt (0)=0.
Управляющие воздействия со стороны электрогидравлического регулятора при перемещении навесного устройства, кинематически связанного с силовым гидроцилиндром привода, в сторону подъема и опускания определяются как произведения:
qA kqi1 и qs kqi2 .
Баланс потоков рабочей жидкости в узле напорной линии гидросистемы привода с учетом выражения (3.2) имеет вид [68]
kqi1 kqi2 |
A |
dxA |
|
V |
|
dpA |
0 |
(3.5) |
dt |
|
Eпр |
|
dt |
||||
|
|
|
|
|
|
46
c начальными условиями pA(0)=0, dpA/dt (0)=0, причем kqi1max kqi2 max Q .
Из дифференциального уравнения (3.5) производная давления в указанном
узле равна |
|
|
|
|
|
|
|
|
|
|
|
|
dp |
A |
|
Eпр |
k |
i |
k |
i A |
dx |
A |
. |
|
|
|
|
|
|
|
|||||
|
dt |
|
V |
|
q 1 |
|
q 2 |
dt |
|||
|
|
|
|
|
|
||||||
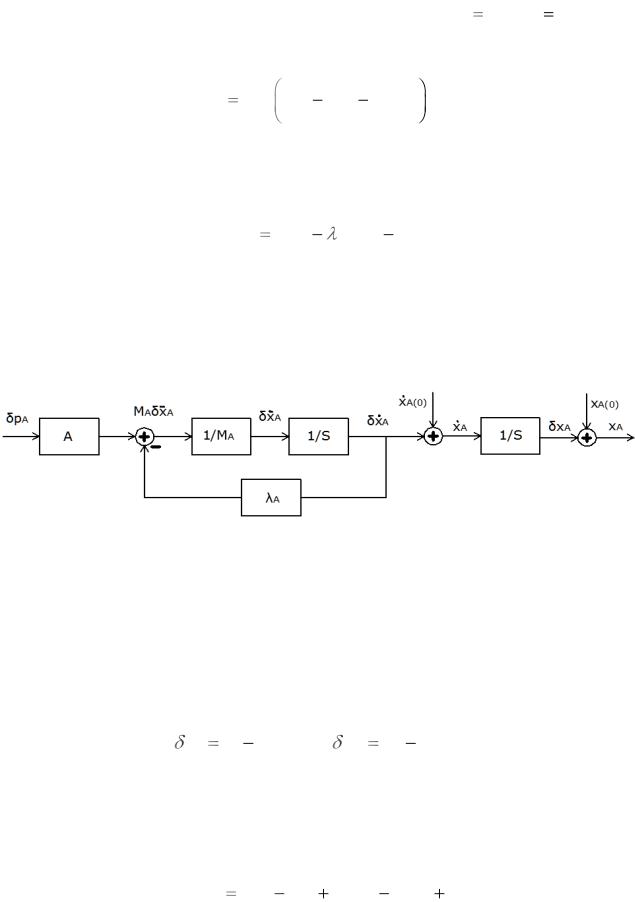
Движение штока силового гидроцилиндра с приведенными массой и весовой нагрузкой в условиях вязкого трения описывается дифференциальным уравнением
M A |
d 2 xA |
pA A |
A |
dxA |
GA |
(3.6) |
dt2 |
dt |
с начальными условиями хA(0)= хAS, dхA/dt (0)=0.
Структурная схема динамической модели силового гидроцилиндра согласно уравнению (3.4), которая отражает преобразование входного сигнала δpА в выходной сигнал хА путем последовательного интегрирования [69, 70], представлена на рисунке 3.2.
Рисунок 3.2. – Структурная схема динамической модели силового гидроцилиндра
Сигнал со старшей производной последовательно в прямой цепи преобразуется интегрирующими звеньями вида 1/S, а также усилительными звеньями А, 1/МА и λА. Добавляя на выходах интегрирующих звеньев начальные условия, получаем часть прямой цепи схемы, в которой присутствует выходной сигнал и его производные. При этом на указанной схеме переменные величины выражены в приращениях от их равновесного состояния в виде разностей [6-A]:
xA xA xAS и |
pA pA pAS . |
Приведенное ниже дифференциальное уравнение описывает колебания точки О остова мобильной машины с приведенными массой и весовой нагрузкой в условиях его базирования на резиновых шинах согласно упруго-вязкой модели
[71]
|
|
d 2 x |
|
dy |
|
dx |
|
M |
|
O |
C( y x ) K ( |
|
|
O |
) G |
|
dt2 |
|
|
||||
|
O |
O |
dt |
|
dt |
O |
с начальными условиями хО(0)= хОS, dхО/dt (0)=0.
47
Коэффициенты передачи силовой проводки электрогидравлического привода согласно расчетной схеме (рисунок 2.10, б) равны отношениям смещений соответствующих точек остова из начального положения в заданное под действием управляющего воздействия:
k |
BD |
xBВ |
; k |
DE |
xDD |
; k |
DO |
xDD |
, |
|
|||||||||
|
|
|
|||||||
|
xDD |
|
xEE |
xOO |
|
||||
|
|
|
|
|
|
||||
Высоту точки D остова мобильной машины, в которой расположен ультразвуковой датчик расстояния, над рельефом поля (см. рисунок 2.10, в) получаем из предположения, что остов имеет несколько степеней свободы: вращение вокруг точки В от весовых нагрузок при ее вертикальном перемещении посредством навесного устройства от силового гидроцилиндра и возможность поворота вокруг точки О. Поэтому указанная высота с учетом этих степеней свободы равна разно-
сти |
kG |
|
|
|
hD hBS kDO xO |
xA(0) |
xA , |
||
kBD |
||||
|
|
|
где xО и xА – перемещения точек О и А соответственно остова и штока силового гидроцилиндра; xА(0) – начальное условие.
Глубина обработки почвы, соответствующая расположению сошника (точка Е), определяется отношением
a H hD , kDЕ
где Н – конструкционный параметр; hD – высота расположения датчика.
В расчетах приняты следующие основные и производные размерности физических величин: масса – кг; перемещение – м; время – с; скорость – м/с; поток – м3/с; сила – Н; давление – Н/м2; ток – А; напряжение – В; активное сопротивление – Ом.
|
|
Исходные данные для расчетов имеют следующие значения: |
W |
2,5 – задающее воздействие; |
|
emax |
2,5 – максимальное рассогласование; |
|
Uh max |
5 – максимальное выходное напряжение высотного датчика; |
|
|
0,025 – параметр зоны нечувствительности; |
|
hDS |
|
0,5735 – высота расположения датчика на остове; |
aDS |
|
0,0513 – условная глубина под датчиком; |
l1 |
4,7 и l2 0,5 – кинематические параметры; |
|
kG |
3,2 – коэффициент передачи навесного устройства; |
|
hBS |
|
0,6 – конструкционный параметр; |
xAmax |
0,2 – максимальный ход гидроцилиндра; |
|
R |
1,7 – сопротивление электромагнита; |
|
48
T |
0,05 – постоянная времени электромагнита; |
Q 0,001 – производительность насоса; |
|
kтр = 0,00243 – коэффициент податливости трубопровода; |
|
E |
1,5 109 – модуль упругости рабочей жидкости; |
D |
0,09 – диаметр штока гидроцилиндра; |
A |
200000 – коэффициент вязкого трения; |
|
|
Ga |
120540 и Ma 12300 – вес и масса мобильной машины; |
K |
50000 – обобщенный коэффициент диссипации; |
Te |
0,04 – постоянная времени экспоненты; |
Ty |
2;4 и Ay 0,03;0,015 – период и амплитуда возмущающего воздействия; |
t10 5 – квант времени.
3.2Определение переходных характеристик
Колебания остова мобильной машины в состоянии вынужденного движения как отклик на управляющее воздействие со стороны силового гидроцилиндра показаны на рисунке 3.3. При этом размах вертикальных перемещений указанного остова составляет 0,07 м, что соответствует натурным измерениям.
а) б)
б)
а– перемещение штока силового гидроцилиндра (управляющее воздействие);
б– вынужденное движение остова
Рисунок 3.3. – Колебания остова трактора при срабатывании силового гидроцилиндра навесного устройства
В условиях кинематических возмущений от рельефа поверхности остов машины совершает колебания, которые при отсутствии опорных колес со стороны соединительного звена влияют на точность пзиционирования рабочих органов. Для повышения качества функционирования электрогидравлического привода рабочих органов путем бесконтактного копирования рельефа поверхности со стороны тягового средства через его навесное устройство осуществляются коррекции
49
высоты расположения указанного звена [72]. Активный контур высотного регулирования в составе замкнутой системы управления, содержащий в цепи обратной связи выходной сигнал датчика, компенсирует отсутствие базирования на опорных колесах [10–А, 73].
Рассмотрим отклики указанного контура при различных видах возмущающих кинематических воздействий на динамическую систему согласно ее математическому описанию. Параметры указанных воздействий соответствуют обоснованным выше временным характеристикам (см. п.3.1).
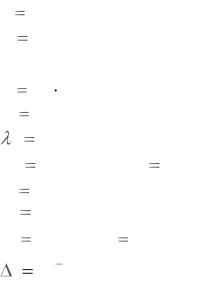
На рисунке 3.4 изображены входные сигналы этой системы при нарастающем экспоненциальном законе для различных значений его асимптоты [74] согласно формуле (3.6).
1 и 2 – процессы, соответствующие нарастающему экспоненциальномузакону возмущающих воздействий со значениями асимптот соответственно 0,015 и 0,03 м Рисунок 3.4. – Кинематические возмущения на входе динамической системы при увеличении неровности
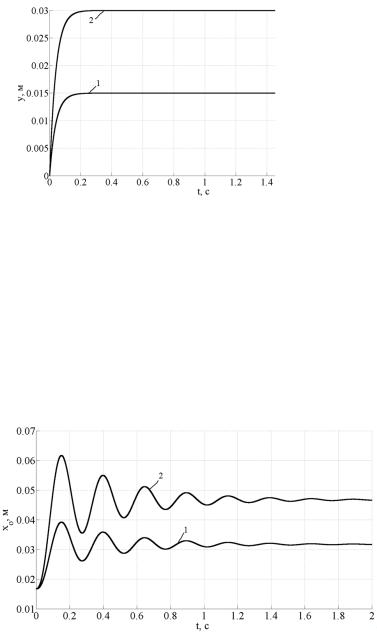
Графические зависимости, отражающие характер переходных процессов перемещения приведенной массы МО остова машины с учетом обобщенных жесткости С и коэффициента диссипации К резиновых шин при указанных возмущающих воздействиях, представлены на рисунке 3.5.
1 и 2 – процессы, соответствующие нарастающему экспоненциальному закону возмущающих воздействий со значениями асимптот соответственно 0,015 и 0,03 м Рисунок 3.5. – Перемещение остова машины
50