

БЭМЗ полищук доки / 2020 / Оборудование / АВТОРЕФЕРАТ САВЧУКА_С_В. ВАК нац. библиотека
.pdfГосударственное научное учреждение «ОБЪЕДИНЕННЫЙ ИНСТИТУТ МАШИНОСТРОЕНИЯ НАЦИОНАЛЬНОЙ АКАДЕМИИ НАУК БЕЛАРУСИ»
На правах рукописи УДК 62-523.3: 681.527.3
САВЧУК Сергей Васильевич
ПОВЫШЕНИЕ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРИВОДА РАБОЧИХ ОРГАНОВ МОБИЛЬНЫХ МАШИН ПРИ БЕСКОНТАКТНОМ КОПИРОВАНИИ РЕЛЬЕФА ПОВЕРХНОСТИ
Автореферат диссертации на соискание ученой степени
кандидата технических наук
по специальности 05.02.02 – Машиноведение, системы приводов и детали машин
Минск, 2019
2
Работа выполнена в государственном научном учреждении «Объединенный институт машиностроения Национальной академии наук Беларуси».
Научный руководитель
Официальные оппоненты:
Строк Евгений Яковлевич, кандидат технических наук, доцент, заведующий лабораторией электрогидравлических систем управления ГНУ «Объединенный институт машиностроения НАН Беларуси»
Пинчук Владимир Владимирович, доктор технических наук, доцент, заведующий кафедрой «Нефтегазоразработка и гидропневмоавтоматика», УО «Гомельский государственный технический университет им. П.О. Сухого»
Жданович Чеслав Иосифович, кандидат технических наук, доцент кафедры «Тракторы», Белорусский национальный технический университет
Оппонирующая |
УО «Брестский государственный технический |
организация |
университет» |
Защита состоится |
«13» декабря 2019 г. в 1430 на заседании Совета |
по защите диссертаций Д 01.15.01 при ГНУ «Объединенный институт машиностроения НАН Беларуси» по адресу: Республика Беларусь, 220072, г. Минск, ул. Академическая, 12, телефон ученого секретаря (017) 284-24-09, e-mail: a.v.kovalenko@mail.ru.
С диссертацией можно ознакомиться в библиотеке ГНУ «Объединенный институт машиностроения НАН Беларуси».
Автореферат разослан «13» ноября 2019 г.
Ученый секретарь Совета |
|
по защите диссертаций, |
|
кандидат технических наук, доцент |
А.В. Коваленко |
3
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Связь работы с крупными научными программами (проектами), темами
Диссертационная работа выполнена в лаборатории электрогидравлических систем управления Государственного научного учреждения «Объединенный институт машиностроения НАН Беларуси», тема диссертационной работы соответствует приоритетному направлению научных исследований Республики Беларусь на 2016-2020 годы, утвержденному Постановлением Совета Министров Республики Беларусь от 12.03.2015 г. №190: 7. Системы и комплексы машин, так как в ней рассматриваются вопросы разработки электрогидравлических приводов для использования в тракторах, а также другой мобильной технике, что является предпосылкой для создания и производства конкурентоспособной продукции.
Результаты работы использовались при выполнении НИР и НИОКР ГПНИ «Механика, техническая диагностика, металлургия», 2014-2015 г.г., задание 1.22 «Развитие принципов построения комплекса современных бортовых систем управления и диагностики транспортных средств и разработка рекомендаций по их промышленному применению», этап 1.22.4 «Исследование закономерностей функционирования и обоснование параметров электрогидравлической системы управления скоростью исполнительных механизмов энергосберегающих приводов с использованием пьезоэлектрических компонентов» (госрегистрация № 20141970), а также ГНТП «Машиностроение и машиностроительные технологии», подпрограмма «Машиностроение», задание АТ-06.34 «Разработать и освоить производство импортозамещающего электрогидравлического регулятора фланцевого исполнения для гидроблока управления с секционным распределителем РП-70» (госрегистрация № 20130494).
Цель и задачи исследования
Цель настоящего исследования – повышение качества процесса функционирования электрогидравлического привода рабочих органов мобильных машин.
Для достижения поставленной цели необходимо решить следующие задачи:
-выполнить анализ схем и параметров известных гидроприводов мобильных машин, а также результатов проведенных исследований;
-определить структуру и конструкционные параметры электрогидравлического привода при бесконтактном копировании рельефа поверхности;
-разработать расчетную схему динамической системы электрогидравлического привода;
-составить математическое описание процесса функционирования указанного привода с целью его компьютерного моделирования;
-разработать методику экспериментальных исследований электрогидравлического привода в лабораторных условиях с имитацией рабочих процессов при кинематических и силовых воздействиях;
4
-определить характеристики рабочих процессов, установить взаимосвязь структурных и конструкционных параметров указанного привода с точностью позиционирования навесного устройства;
-разработать комплексный критерий оценки качества процесса функционирования электрогидравлического привода;
-провести экспериментально-статистическое исследование процесса функционирования электрогидравлического привода для построения регрессионной зависимости коэффициента вариации высоты расположения ультразвукового датчика от параметров возмущающих воздействий и обобщенной жесткости;
-провести проверку работоспособности привода высевающих аппаратов в лабораторных условиях;
-выполнить проверку качества процесса функционирования электрогидравлического привода в полевых условиях.
Научная новизна:
-предложен комплексный критерий оценки качества процесса функционирования электрогидравлического привода рабочих органов мобильных машин, характеризующий их кинематическое и силовое взаимодействие с почвой, что позволило повысить ее достоверность;
-разработана методика натурных исследований указанного привода в лабораторных условиях с имитацией рабочих процессов;
-выявлена взаимосвязь структурных и конструкционных параметров динамической системы с точностью позиционирования навесного устройства при бесконтактном копировании рельефа поверхности.
Положения, выносимые на защиту:
-способ высотного позиционирования рабочих органов мобильных машин, основанный на бесконтактном копировании рельефа поверхности с использованием акустических средств измерения расстояния, что позволяет повысить точность позиционирования рабочих органов и упростить конструкцию агрегата;
-математическое описание процесса функционирования электрогидравлического привода рабочих органов, составленное с учетом параметров силовой проводки, индуктивности обмоток электромагнитов регулятора, а также сжимаемости рабочей жидкости в узлах гидросистемы и податливости трубопроводов, что позволяет адекватно отразить динамические процессы;
-метод оценки качества процесса функционирования электрогидравлического привода рабочих органов мобильных машин, учитывающий посредством весового коэффициента кинематические и силовые возмущения, что позволяет определить агротехнические и энергетические характеристики;
-имитация кинематических возмущений со стороны рельефа поверхности на остов мобильной машины, основанная на использовании переменного силового электромагнитного поля, взаимодействующего с ферромагнитным плоским
5
якорем, кинематически связанным с подпружиненной виброплощадкой, что позволяет обеспечить формирование возмущающих воздействий по заданному закону.
Личный вклад соискателя
Соискателем самостоятельно изучены конструкционные и эксплуатационные параметры посевных агрегатов, выпускаемых зарубежными производителями. Совместно с научным руководителем кандидатом техн. наук, доцентом Е.Я. Строком сформулированы цели и задачи выполненного исследования, а также обсуждены его результаты. Автором лично разработаны математическое описание функционирования электрогидравлического привода, а также методические положения и средства для проведения лабораторных испытаний с имитацией рабочих процессов. Кроме того, соискателем выполнено научное сопровождение натурных исследований электрогидравлического привода рабочих органов мобильной машины в составе посевного агрегата и проведена статистическая обработка результатов лабораторно-полевых испытаний. Часть работ была выполнена совместно с Н.Д. Лепешкиным, Л.Д. Бельчиком и другими соавторами, которые принимали участие в научно-техническом сопровождении исследований и занимались изучением вопросов, не вошедших в настоящую диссертацию.
Апробация результатов диссертации
Основные положения и результаты диссертационной работы доложены и обсуждены на международных научно-технических конференциях: «Инновационное развитие АПК России на базе интеллектуальных машинных технологий» ФГУБНУ ВИМ (Москва, 17 - 18 сентября 2014 г.); «Технический прогресс в сельскохозяйственном производстве» ННЦ «Институт механизации и электрификации сельского хозяйства» - 9 всеукраинская конференция-семинар аспирантов, докторов и слушателей в отраслевой аграрной инженерии (Глеваха, 21 - 23 мая 2014 г.); «Инновации в машиностроении-2015» (г. Минск, 1 - 2 октября 2015 г.).
Опубликованность результатов диссертации
По материалам выполненных исследований опубликовано 19 научных работ, в том числе: 8 статей в рецензируемых научных изданиях, рекомендованных ВАК РБ для опубликования результатов исследований, 2 статьи в инженерных журналах, 2 статьи по материалам конференций, получено 4 патента Республики Беларусь, 3 патента Евразийского союза.
Структура и объем диссертации
Диссертационная работа состоит из введения, общей характеристики работы, четырех глав, заключения, библиографического списка и приложений. Полный объем работы составляет 105 страниц. Машинописного текста – 96 страниц, в том числе 7 таблиц и 69 рисунков на 49 страницах, 8 страниц библиографического списка из 100 источников и 8 страниц приложений, включающих документы об апробации и внедрении полученных результатов.
6
ОСНОВНАЯ ЧАСТЬ
Во введении обоснована актуальность темы и необходимость проведения исследования, обозначена цель работы и рассмотрены направления работ, направленных на создание перспективных приводов рабочих органов технологического оборудования мобильных машин.
Первая глава посвящена анализу научно-технической литературы по исследованиям приводов систем управления рабочими органами. Анализ схем и параметров известных приводов, а также результаты проведенных исследований позволяют сделать вывод об эффективности их функционирования в режиме высотного позиционирования, который имеет определенные преимущества перед пози- ционно-силовым способом регулирования положения рабочих органов.
Высотное регулирование контактным способом осуществляется за счет установки на орудии регулируемого по высоте опорного колеса, обеспечивающего заданное положение соединительного звена между тяговым средством и машиной над рельефом поверхности. При этом ручная настройка обеспечивает регулировку вертикального положения указанного колеса и установку необходимой глубины обработки почвы. При движении по полю орудие копирует рельеф поверхности при постоянной величине заглубления рабочих органов.
Экспериментальную доводку опытных образцов посевных агрегатов технически и экономически целесообразно выполнять в межсезонный период с использованием лабораторного оборудования. В связи с этим необходимо разработать методические положения испытаний и конструкцию стенда, позволяющие исследовать рабочие процессы в электрогидравлических приводах указанных агрегатов при бесконтактном копировании рельефа.
Вторая глава посвящена определению структуры и параметров электрогидравлического привода в составе контура высотного регулирования рабочих органов. Известный способ контактного копирования рельефа поля предполагает осуществление стабилизации подпора рабочей жидкости в полости силового гидроцилиндра, сообщенной с гидроаккумулятором. Опорные колеса, установленные в районе соединительного устройства агрегата с тяговым средством, обеспечивают удовлетворительное качество работы при подготовке почвы и высеве семян путем контактного копирования рельефа. Однако их использование увеличивает металлоемкость конструкции посевного агрегата и его стоимость, поэтому для копирования рельефа поверхности целесообразно применить контур высотного регулирования с использованием ультразвукового датчика расстояния в цепи обратной связи.
Принцип бесконтактного копирования рельефа поверхности основан на его дистанционном сканировании при помощи акустических или других средств из-
7
мерения расстояния, что позволяет устранить недостатки контактного копирования, заключающиеся в увеличении тягового сопротивления машины и повреждении почвы в зоне опорного контакта.
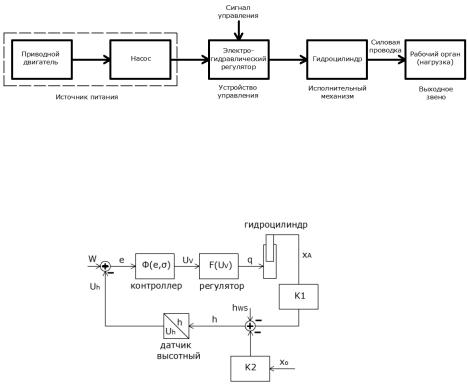
Функциональная схема электрогидравлического привода отражает построение основных компонентов электрогидравлического привода, расположенных на тракторе и в цепи силовой проводки машины (рисунок 1). Сигнал управления подается на регулятор, гидравлически соединенный с источником питания. Управляющее воздействие передается на исполнительный механизм, который корректирует положение рабочих органов через жесткую силовую проводку.
Рисунок 1. – Функциональная схема электрогидравлического привода рабочих органов
Блок-схема замкнутой системы высотного регулирования положения рабочих органов над поверхностью изображена на рисунке 2.
хА – перемещение штока гидроцилиндра; K2, K1 – коэффициенты передач;
hWS, h – заданное и действительное значения высоты; Uh – выходной сигнал датчика расстояния; W – задающее воздействие; е – рассогласование; Ф(е,σ) – оператор алгоритма управления; Uv – управляющее воздействие; F(Uv) – передаточная функция электрогидравлического регулятора; q – поток рабочей жидкости
Рисунок 2. – Блок-схема замкнутой системы высотного регулирования положения рабочих органов
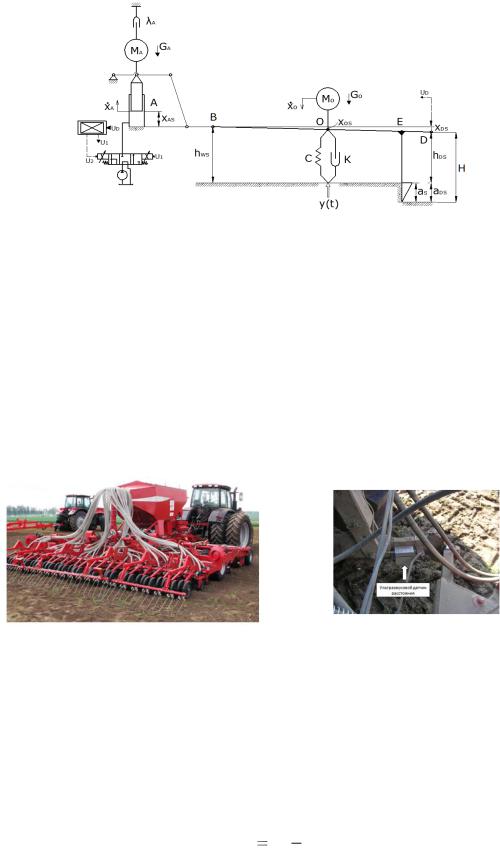
Расчетная схема (рисунок 3) на примере посевного агрегата описывает принцип высотного позиционирования рабочих органов без опорного колеса в районе соединительного звена (точка В, расположенная в установившемся режиме на высоте hBS) путем бесконтактного копирования рельефа поверхности.
Схема содержит обозначения кинематических связей, сосредоточенных масс МО, МА с векторами их перемещений dх0/dt и dхА/dt, а также весовых нагру-
8
зок GО, GА, позволяющие составить математическое описание процесса функционирования электрогидравлического привода.
Рисунок 3. – Расчетная схема электрогидравлического привода рабочих органов
Ультразвуковой датчик расстояния, установленный за рабочими органами в точке D, которая имеет статическое перемещение xDS, начальную высоту расположения над рельефом поля hDS и условную глубину расположения рабочих органов aDS, вырабатывает выходной электрический сигнал Uh с максимальным значением Uhmax, поступающий на контроллер системы управления для формирования управляющих воздействий U1 и U2 при установившемся задающем воздействии W. Приведенным высотным параметрам соответствует обобщенный линейный размер Н.
На рисунке 4 изображен общий вид посевного агрегата АППМ-6 с трактором «Беларус».
а) |
б) |
а – посевной агрегат; б – расположение датчика расстояния на нижней тяге трактора Рисунок 4. – Общий вид посевного агрегата
Третья глава содержит теоретические исследования рабочих процессов в электрогидравлическом приводе, математическое описание функционирования которого выполнено в виде дифференциальных и алгебраических уравнений.
Согласно блок-схеме (см. рисунок 2) рассогласование при задающем воздействии W и сигнале обратной связи Uh, являющимся откликом на кинематическое возмущение у(t), равно разности
e W Uh .
9
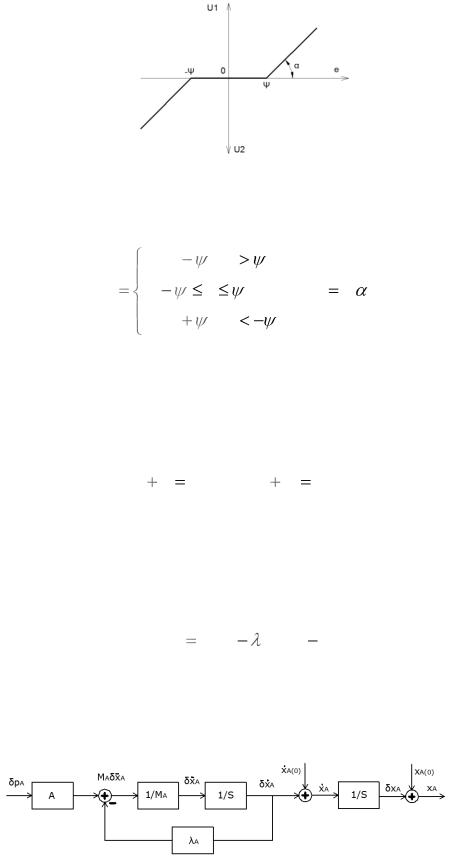
Графическая характеристика зависимости управляющих сигналов U1 и U2 от рассогласования е при порогах переключения -ψ и ψ, соответствующая нелинейному уравнению оператора, показана на рисунке 5.
Рисунок 5. – Характеристика оператора
Система неравенств в виде нелинейного уравнения оператора Ф(е) записана следующим образом:
|
k p |
e |
|
, e |
, |
Ф e |
0, |
|
e |
, |
k p tg , |
|
k p |
e |
|
, e |
; |
где k p - коэффициент пропорциональности. |
|
||||
Изменение токов i1 и i2 |
в обмотках электромагнитов подъема и опускания |
||||
регулятора в режиме позиционирования рабочих органов описывается следующими уравнениями:
Tdi |
|
U |
Tdi |
|
U |
2 |
|
1 |
i |
1 |
и |
2 |
i |
|
|
|
|
|
|
|
|||
dt |
1 |
R |
dt |
2 |
R |
||
|
|
||||||
c начальными условиями i1(0)=0, di1/dt(0)=0 и i2(0)=0, di2/dt(0)=0.
Движение штока силового гидроцилиндра с приведенными массой и весовой нагрузкой в условиях вязкого трения представлено в виде дифференциального уравнения
M A |
d 2 xA |
pA A |
|
dxA |
GA |
dt2 |
A dt |
||||
с начальными условиями хA(0)=хAS, dхA/dt(0)=0. |
|
||||
Определение выходного сигнала xA |
указанного уравнения отражено на |
||||
структурной схеме, приведенной на рисунке 6. |
|
||||
Рисунок 6. – Структурная схема интегрирования дифференциального уравнения
10
С помощью усилительного звена с коэффициентом усиления А получим сигнал со старшей производной, который последовательно в прямой цепи преобразуется интегрирующими звеньями вида 1/S. Добавляя на выходах интегрирующих звеньев начальные условия, получаем часть прямой цепи схемы, в которой присутствует выходной сигнал и его производные. При этом на указанной схеме переменные величины выражены в приращениях от их равновесного состояния.
Дифференциальное уравнение, описывающее колебания точки О остова машины с приведенными массой и весовой нагрузкой в условиях его базирования на резиновых шинах, имеет вид
|
|
d 2 x |
|
dy |
|
dx |
|
M |
|
O |
C( y x ) K ( |
|
|
O |
) G |
|
dt2 |
|
|
||||
|
O |
O |
dt |
|
dt |
O |
с начальными условиями хО(0)=хОS, dхО/dt(0)=0.
Высоту точки D остова машины над рельефом поля и глубину обработки почвы рабочим органом получаем из следующих соотношений:
h |
h |
k |
x |
kG |
x |
AS |
x |
A |
и |
a |
H hD |
. |
|
||||||||||||
|
|
|||||||||||
D |
BS |
|
DO O |
kBD |
|
|
|
kDЕ |
||||
|
|
|
|
|
|
|
|
|
||||
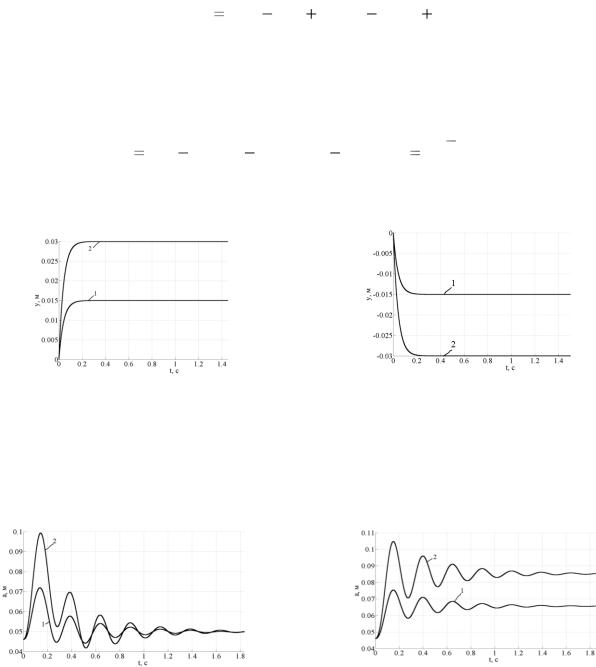
На рисунке 7 изображены входные сигналы системы при нарастающем (а) и убывающем (б) экспоненциальном законе для различных значений его асимптоты
а) |
б) |
1 и 2 – значения асимптот экспоненты соответственно 0,015 м и 0,03 м Рисунок 7. – Кинематические возмущения на входе динамической системы при увеличении (а) и уменьшении (б) неровности
На рисунках 8 и 9 приведены графические зависимости переходных процессов изменения глубины обработки почвы посевным агрегатом при увеличении и уменьшении неровности соответственно.
а) |
б) |
1 и 2 – процессы, соответствующие значениям асимптот экспоненты 0,015 м и 0,03 м Рисунок 8. – Изменение глубины обработки почвы агрегатом с замкнутой (а) и разомкнутой (б) системами управления при увеличении неровности