

28 Влияние д составляющей закона регулирования на качество переходных процессов аср(на примере пд регулятора)
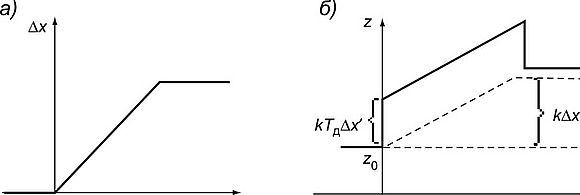
В математике нахождение скорости изменения некоторой переменной величины называется дифференцированием. Поэтому такой закон регулирования — пропорционально-дифференциальный (сокращенно: ПД-закон регулирования и ПД- регулятор). Слагаемое к Ах называется пропорциональной или П-составляющей, а слагаемое к Тя Ах' — дифференциальной или Д-составляющей. Коэффициент Гд в дифференциальной составляющей всегда положителен и имеет размерность времени. Поэтому он получил название времени дифференцирования или времени предварения. Если рассогласование Ах не изменяется, то его скорость Ax' равна нулю и, как видно из сравнения формул (3.3) и (3.4), в этом частном случае ПД-закон регулирования действует так же, как П-закон. Следовательно, действие Д-составляющей проявляется лишь в неустановившемся состоянии АСР, пока рассогласование изменяется во времени. В ПД-регуляторе в сравнении с П-регулятором добавляется еще один настроечный параметр — время предварения Тг Переходный процесс в П-регуляторе показан на рис. 3.9, в. Из сравнения графиков ПД-закона регулирования и П-закона видно, что первый характеризуется наличием импульса, возникающего в момент скачка рассогласования. Появление этого импульса объясняется тем, что скорость Ax' в момент скачка рассогласования бесконечно велика. Поэтому слагаемое к Та Ax' в формуле (3.4), а значит, и выходной сигнал регулятора г в этот момент достигают очень больших значений. Чтобы нагляднее увидеть эффект предварения в ПД-регуляторе, рассмотрим его реакцию не на скачкообразное, а на постепенное изменение рассогласования с постоянной скоростью (рис. 3.10). Пунктиром на этом графике показана П-составляющая закона регулирования, изменение которой подобно изменению рассогласования. Дифференциальная составляющая увеличивает выходной сигнал регулятора г в течение всего времени, пока увеличивается рассогласование. Чем быстрее оно изменяется, тем больше увеличение выходного сигнала ПД-регулятора по сравнению с П-регулятором. В случае уменьшения рассогласования выходной сигнал регулятора уменьшался бы. Такое форсированное изменение выходного сигнала ПД-регулятора позволяет эффективнее компенсировать действие возмущений на объекты с запаздыванием.
37 Структура распределенной асутп
Чаще всего распределенные АСУ ТП имеют трехуровневую структуру. Пример структурной схемы комплекса технических средств такой системы приведен на рисунке 1.
На верхнем уровне с участием оперативного персонала решаются задачи диспетчеризации процесса, оптимизации режимов, подсчета технико-экономических показателей производства, визуализации и архивирования процесса, диагностики и коррекции программного обеспечения системы. Верхний уровень АСУ ТП реализуется на базе серверов, операторских (рабочих) и инженерных станций.
На среднем уровне — задачи автоматического управления и регулирования, пуска и останова оборудования, логико-командного управления, аварийных отключений и защит. Средний уровень реализуется на основе ПЛК.
Нижний (полевой) уровень АСУ ТП обеспечивает сбор данных о параметрах технологического процесса и состояния оборудования, реализует управляющие воздействия. Основными техническими средствами нижнего уровня являются датчики и исполнительные устройства, станции распределенного ввода/вывода, пускатели, концевые выключатели, преобразователи частоты.
 Рис.1 Пример
структурной схемы распределенной АСУ
ТП
Рис.1 Пример
структурной схемы распределенной АСУ
ТП