

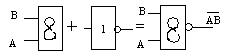
35. Логический элемент и-не,или-не . Rs-триггер
А |
В |
И |
НЕ |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
В промышленности выпускается 7 типов логических схем, наиболее широко представлена схема И-НЕ, что связано с универсальны ее характером.
Собирая логические схемы между собой можно поучить различные цифровые устройства. В общем случаи полученные схемы можно разбить на 2 группы: комбинационные логические схемы(КЛС) и последовательсные. КСЛ состояние выходов в любой момент времени определяется состоянием входов. В последовательсных схемах состояние выходов также зависит от предыдущего состояния входа. Структурной ячейкой в КСЛ является вентиль, в последовательсных является триггер. Собирая триггеры между собой можно получить счетчики, различные устройства запоминания.
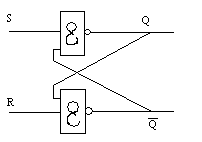
RS-триггер
S,R-входы
Q,Q- выходы
R |
S |
Q |
Q- |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
36. Структурная схема устройств аналогового ввода информации
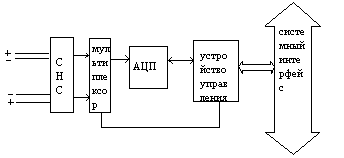
Датчики преобразования технологического параметра в электрические сигналы. Уровни этих сигналов, как правило, не соответствуют требованиям АЦП. Поэтому необходимые схемы нормализации сигналов АЦП преобразовывает аналоговый сигнал в цифровой, а устройство управления обеспечивает связь с ЦП и организовывает работу АЦП и мулитиплексора.CНC-схема нормализации сигналов.
В ряде случаев для управления технологическим процессом требуется аналоговый выходной сигнал (исполнительный механизм, электропневматический преобразователь, частотный преобразователь). Сопряжение УВК с такими устройствами осуществляется посредству модулей аналогового вывода.
Структурная схема устройства аналогового вывода
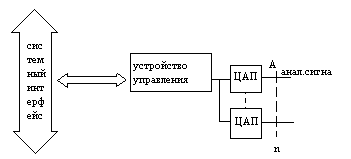
ЦАП вырабатывает аналоговый сигнал, пропорционально цифровому значению поступающего от процесса. Устройство управления обеспечивает связь с ЦП и передачу данных к ЦАП. Выходные сигналы ЦАП (напряжение или ток) приводятся к виду, требуемого для управления исполнительного устройства.
43. 1. Качественные показатели переходных процессов в АСР. Хар-ка качества АСР: Амплитуда – А, Период – Т , Квазистатическая ошибка регулирования – а , ТвиТо− периоды включения (X=Хmax) и отключения (X=Хmin) сигнала регулирующего воздействия соответственно.
Время регулирования-время,за которое выходная величина приходит в новое установившееся состояние с заданной степепью точности.
Перерегулирование –отношение второй амплитуды к первой
Интегральное квадратичное отклонение – характеризует разброс регулируемой величины около вновь установившейся величины.
Апериодический переходной процесс с минимальным временем регулирования:
 Этот
типовой процесс (см. рис.1) предполагает,
что отрабатывается возмущение Z (система
автоматической стабилизации). В данном
случае настройки регулятора подбираются
так, чтобы время регулирования tp было
минимальным. Данный вид типового процесса
широко используется для настройки
систем, не допускающих колебаний в
замкнутой системе регулирования.
Ер -
ошибка регулирования, t -
время.
Этот
типовой процесс (см. рис.1) предполагает,
что отрабатывается возмущение Z (система
автоматической стабилизации). В данном
случае настройки регулятора подбираются
так, чтобы время регулирования tp было
минимальным. Данный вид типового процесса
широко используется для настройки
систем, не допускающих колебаний в
замкнутой системе регулирования.
Ер -
ошибка регулирования, t -
время.
П
 ЕРЕХОДНОЙ
ПРОЦЕСС С 20%-НЫМ ПЕРЕРЕГУЛИРОВАНИЕМ И
МИНИМАЛЬНЫМ ВРЕМЕНЕМ ПЕРВОГО ПОЛУПЕРИОДА.
Такой
процесс наиболее широко применяется
для настройки большинства промышленных САР,
т.к.он соединяет в себе достаточно
высокое быстродействие t1= min при
ограниченной колебательности у
= 20%.
ЕРЕХОДНОЙ
ПРОЦЕСС С 20%-НЫМ ПЕРЕРЕГУЛИРОВАНИЕМ И
МИНИМАЛЬНЫМ ВРЕМЕНЕМ ПЕРВОГО ПОЛУПЕРИОДА.
Такой
процесс наиболее широко применяется
для настройки большинства промышленных САР,
т.к.он соединяет в себе достаточно
высокое быстродействие t1= min при
ограниченной колебательности у
= 20%.ПЕРЕХОДНОЙ ПРОЦЕСС, ОБЕСПЕЧИВАЮЩИЙ МИНИМУМ ИНТЕГРАЛЬНОГО КРИТЕРИЯ КАЧЕСТВА.
Интегральный критерий качества выражается формулой:
К достоинствам этого процесса можно отнести высокое быстродействие (1-й полуволны) при довольно значительной колебательности. Кроме этого, оптимизация этого критерия по параметрам настройки регулятора может быть выполнена аналитически, численно (на ЭВМ) или путем моделирования (на АВМ).Процесс, обеспечивающий минимум интегрального критерия качества, широко применяется при настройке систем регулирования величины pH - характеризующий кислотность раствора.