

12. Структурные схемы соединения типовых звеньев и их преобразование
В системах управления встречаются три вида соединений звеньев: последовательное, параллельное и соединение по схеме с обратной связью.
Последовательное соединение звеньев соединение характеризуется тем, что выход предыдущего звена подается на вход последующего.
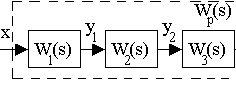

Рис. 3.10. Последовательное соединение звеньев
Выходная
величина последовательно соединенных
звеньев определяется ![]() .
.
Параллельное соединение звеньев изображено на рис.3.11, такое соединение характеризуется тем, что на входы всех звеньев подается одно и то же входное воздействие, а выходная величина определяется суммой выходных величин отдельных звеньев.
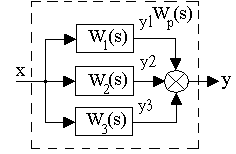
Рис. 3.11. Параллельное соединение звеньев
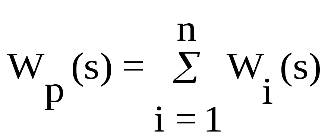
Выходная величина параллельно соединенных звеньев определяется y=y1+y2+y3, т.е.
![]() .
.
 ,
(3.52)
,
(3.52)
Обратная связь. Такое соединение звеньев изображено на рис.3.12, оно характеризуется тем, что выходной сигнал звена подается на его вход.
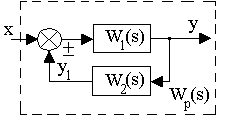
Рис. 3.12. Соединение звеньев по схеме с обратной связью
Обратная связь может быть положительной (ПОС), если сигнал y1, снимаемый с выхода второго звена, суммируется с сигналом x на входе, и отрицательной (ООС), если y1 вычитается. Кроме того, обратные связи могут быть жесткими и гибкими. Связь называется гибкой, если передаточная функция W2(s) в установившемся режиме равна нулю.
Для определения результирующей передаточной функции такой комбинации звеньев запишем очевидные соотношения:
 ,
,
где знак “+” относится к положительной, а знак “-” - к отрицательной обратной связи
15. Исполнительные механизмы
ИУ предназначены для воздействия на процесс в соответствии с командной информацией от управляющего устройства. Выходным параметром ИМ является расход вещества или энергии, поступающих на объект регулирования, а входным — сигнал управляющего устройства.
ИУ можно разделить на две большие группы: электромоторного типа и электромагнитного типа.
Место ИУ в типовой структурной схеме системы регулирования показано на рис. 1. Правильный выбор и расчет исполнительных устройств имеет первостепенное значение, поскольку эти устройства являются конечными в цепях автоматического регулирования любой сложности, вследствие чего погрешности в работе ИУ непосредственно влияют на качество протекания автоматизируемого процесса.
ИУ обычно содержат следующие функциональные блоки: блок усиления или позиционер, исполнительный механизм, регулирующий (рабочий) орган, блок ручного управления (дублер), датчик положения, блок обратной связи, блок сигнализации конечных положений. В зависимости от конкретных условий структура и конструкция ИУ могут существенно различаться. Так, например, при управлении некоторыми электрическими аппаратами (крупными электродвигателями, электрическими ваннами и т. д.) регулируемым параметром является поток электрической энергии. В этом случае необходимость в исполнительном механизме и регулирующем органе отпадает. Роль исполнительного устройства выполняет блок усиления. В ряде устройств регулирующий орган является частью технологической оборудования. Например, при регулировании толщины проката в качестве регулирующего органа выступают валки, которые являются частью прокатного стана. Такого рода устройства не являются продукцией приборостроения и здесь не рассматриваются.
Пневматические исполнительные механизмы просты, надежны к удобны в эксплуатации, пожаробезопасны. Поэтому они широко применяются в пожаро- и взрывоопасных производствах (окрасочные и промывочные отделения, производство легковоспламеняющихся веществ). Пневматические механизмы имеют высокое быстродействие и точность позиционирования при умеренных перестановочных усилиях.
Гидравлические ИМ применяются в тех случаях, когда необходимо обеспечить большие перестановочные усилия при высоком быстродействии и точности позиционирования. Гидравлические ИМ сложны в изготовлении и требуют специальных источников рабочей жидкости — масляных насосов высокого давления.