

3. Назначение и пд потенциометрических и дифференциально-трансформаторного передающих преобразователей.
В
дифференциально-трансформаторных
передающих преобразователях и
основанной на их использовании системе
дистанционной передачи унифицированным
сигналом измерительной информации
является значение взаимной индукции
между обмотками электрических катушек
(пределы изменения взаимной индуктивности
, 0—10 мГн).
Дифференциально-трансформаторный
преобразователь
представляет собой две катушки первичная
и вторичную,
состоящие каждая из двух секций.
Первичная катушка
состоит
из двух секций, включенных между собой
согласно, т. е. выход одной включен
на вход другой, а во вторичной катушке
выход первой секции 1подключен к выходу
второй секции 2.
Внутри
катушек под действием преобразуемой
величины перемещаетсясердечник4.
Взаимная индуктивность системы в зависимости от положения
сердечника выразится формулой
Величина и фаза выходного сигнала Е(ЭДС) зависят от положения сердечника в катушке преобразователя по отношению к нейтрале О—О.
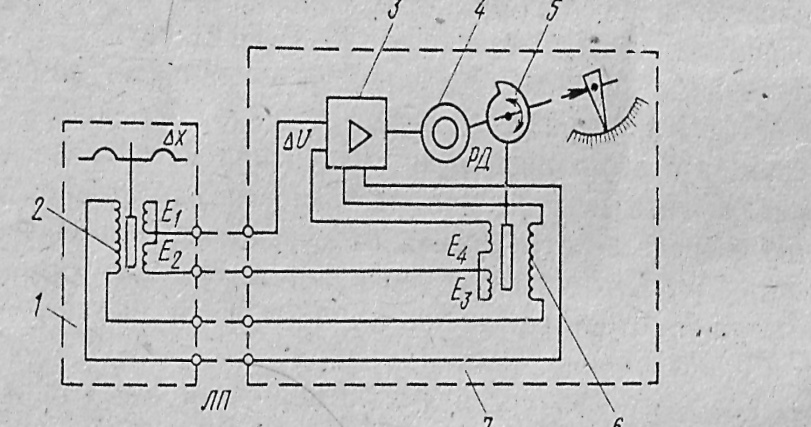
Вторичные обмотки включены встречно и подключены ко входу электронного усилителя.
'Когда сердечник трансформатора 2 находится в среднем (нейтральном) положении, ЭДС, индуцируемые во вторичных обмотках E1 и Е2, равны и направлены навстречу. Это положение характеризуется равенством

Если сердечник трансформатора 6 тоже находится в среднем положении, разность ЭДС во вторичных обмотках этой катушки Е3 и Е4 также равна нулю:
U2 = Е3- Е4 = 0. •
Из равенства следует, что при одинаковых параметрах катушек напряжение на входе в усилитель равно нулю и система находится в покое. В этом случае сигнал разбаланса равен нулю и можно записать:

При
отклонении положения сердечника
трансформатора 2
от
нейтрального под действием изменения
измеряемого параметра изменяется распределение магнитных
потоков во вторичных обмотках.
Следовательно, индуцируемые в них ЭДС
не будут равны, и в цепи возникнет ток,
напряжение которого
изменяется распределение магнитных
потоков во вторичных обмотках.
Следовательно, индуцируемые в них ЭДС
не будут равны, и в цепи возникнет ток,
напряжение которого

Величина
этого напряжения является функцией
перемещения сердечника трансформатора
2,
а
фаза зависит от направления отклонения
сердечника от среднего положения. Сигнал
разбаланса
 подается
на вход электронного усилителя 3
и
после усиления поступает на обмотку
управления реверсивного электродвигателя
4,
который
с помощью кулачка 5
перемещает
сердечник трансформатора 6
до
тех пор, пока разность напряжений
снова
не станет равна нулю. Одновременно с.
перемещением сердечника движутся
стрелка отсчетного устройства или перо
пишущего механизма, связанные с
реверсивным электродвигателем. В
результате каждому положению сердечника
трансформатора 2
передающего
устройства соответствует определенное
положение сердечника катушки
воспринимающего устройства.
подается
на вход электронного усилителя 3
и
после усиления поступает на обмотку
управления реверсивного электродвигателя
4,
который
с помощью кулачка 5
перемещает
сердечник трансформатора 6
до
тех пор, пока разность напряжений
снова
не станет равна нулю. Одновременно с.
перемещением сердечника движутся
стрелка отсчетного устройства или перо
пишущего механизма, связанные с
реверсивным электродвигателем. В
результате каждому положению сердечника
трансформатора 2
передающего
устройства соответствует определенное
положение сердечника катушки
воспринимающего устройства.
Из изложенного следует, что дифференциально-трансформаторный преобразователь является устройством, в котором перемещение сердечника преобразуется во взаимную индуктивность между его первичной и вторичной обмотками. Неравенство взаимных индуктивностей двух преобразователей в системе дистанционной передачи, обусловливает возникновение в ней сигнала разбаланса в виде разности напряжения . Основная погрешность дифференциально-трансформаторной системы при передаче на расстояние до 250 м±0,5—1%, на расстояние до 1 км±2,5%.