Динамика вращательного движения


 Основной
закон динамики вращательного движения:
Основной
закон динамики вращательного движения:

 или M=J
, где М
момент силы M=[
r
F
] , J
момент
инерции •момент
импульса тела.
или M=J
, где М
момент силы M=[
r
F
] , J
момент
инерции •момент
импульса тела.
-
 если М(внешн)=0 -
закон сохранения момента импульса.
если М(внешн)=0 -
закон сохранения момента импульса.
 -
кинетическая энергия вращающегося
тела.
-
кинетическая энергия вращающегося
тела.
работа
при вращательном движении.
МОМЕНТ
СИЛЫ -
величина, характеризующая вращательный
эффект силы; имеет размерность произведения
длины на силу. Различают момент
силы относительно
центра (точки) и относительно оси.
M.
с. относительно центра О наз.
векторная величина M0,
равная векторному произведению
радиуса-вектора r,
проведённого из O в
точку приложения силы F,
на силу M0 =
[rF]
или в др. обозначениях M0 = r F (рис.).
Численно M. с. равен произведению модуля
силы на плечо h,
т. е. на длину перпендикуляра, опущенного
из О на
линию действия силы, или удвоенной
площади

треугольника,
построенного на центре O и
силе:

Направлен
вектор M0 перпендикулярно
плоскости, проходящей через O и F.
Сторона, куда направляется M0,
выбирается условно (M0 -
аксиальный вектор). При правой системе
координат вектор M0 направляют
в ту сторону, откуда поворот, совершаемый
силой, виден против хода часовой стрелки.
M.
с. относительно оси z наз. скалярная
величина Mz,
равная проекции на ось z вектора
M. с. относительно любого центра О,
взятого на этой оси; величину Mz можно
ещё определять как проекцию на
плоскость ху,
перпендикулярную оси z, площади
треугольникаOAB или
как момент проекции Fxy силы F на
плоскость ху,
взятый относительно точки пересечения
оси z с этой плоскостью. T. о.,

В
двух последних выражениях M. с. считается
положительным, когда поворот силы Fxy виден
с положит. конца оси z против хода часовой
стрелки (в правой системе координат).
M. с. относительно координатных
осей Oxyz могут
также вычисляться по аналитич. ф-лам:

где Fx,
Fy,
Fz -
проекции силы F на
координатные оси, х,
у, z -
координаты точки А приложения
силы. Величины Mx,
My,
Mz равны
проекциям вектора M0 на
координатные оси.
Момент инерции
величина,
характеризующая распределение масс в
теле и являющаяся наряду с массой мерой
инертности тела при непоступательном
движении. В механике различают М. и.
осевые и центробежные. Осевым М. и. тела
относительно оси z называется
величина, определяемая равенством: где mi —
массы точек тела, hi —
их расстояния от оси z,
ρ — массовая плотность, V —
объём тела. Величина Iz является
мерой инертности тела при его вращении
вокруг оси (см. Вращательное
движение).
Осевой М. и. можно также выразить через
линейную величину k,
называемую радиусом инерции, по
формуле Iz = Mk2,
где М —
масса тела. Размерность М. и. — L2M;
единицы измерения — кг․м2 или г․см2.
где mi —
массы точек тела, hi —
их расстояния от оси z,
ρ — массовая плотность, V —
объём тела. Величина Iz является
мерой инертности тела при его вращении
вокруг оси (см. Вращательное
движение).
Осевой М. и. можно также выразить через
линейную величину k,
называемую радиусом инерции, по
формуле Iz = Mk2,
где М —
масса тела. Размерность М. и. — L2M;
единицы измерения — кг․м2 или г․см2.
Центробежным
М. и. относительно системы прямоугольных
осей х,
у, z,
проведённых в точке О,
называют величины, определяемые
равенствами:

или
же соответствующими объёмными интегралами.
Эти величины являются характеристиками
динамической неуравновешенности масс.
ТЕОРЕМА
Гюйгенса - Штайнера
Момент инерции
механической системы (тела) относительно
некоторой
оси равен
сумме момента инерции относительно
параллельной ей оси,
проходящей
через центр масс, и величины равной
произведению массы
системы на
квадрат расстояния между осями.
где
JC —
известный момент инерции относительно
оси, проходящей через центр масс тела,
J —
искомый момент инерции относительно
параллельной оси,
m —
масса тела,
d —
расстояние между указанными осями.
второй
закон динамики твердого тела,
вращающегося вокруг неподвижной оси,
имеет вид:
где  –
алгебраическая сумма моментов сил,
действующих на тело относительно оси
вращения,
–
алгебраическая сумма моментов сил,
действующих на тело относительно оси
вращения,
 –
момент инерции тела относительно той
же оси,
–
момент инерции тела относительно той
же оси,
7.
Моме́нт и́мпульса (кинетический
момент, угловой момент, орбитальный
момент, момент количества движения)
характеризует количество вращательного
движения. Величина, зависящая от того,
сколько массы вращается,
как она распределена относительно оси
вращения и с какой скоростью
происходит вращение.
Следует
учесть, что вращение здесь понимается
в широком смысле, не только как регулярное
вращение вокруг оси. Например, даже при
прямолинейном движении тела мимо
произвольной воображаемой точки, не
лежащей на линии движения, оно также
обладает моментом импульса. Наибольшую,
пожалуй, роль момент импульса играет
при описании собственно вращательного
движения. Однако крайне важен и для
гораздо более широкого класса задач
(особенно - если в задаче есть центральная
или осевая симметрия, но не только в
этих случаях).

Зако́н
сохране́ния моме́нта и́мпульса (закон
сохранения углового момента) — векторная
сумма всех моментов импульса относительно
любой оси для замкнутой системы остается
постоянной в случае равновесия системы.
В соответствии с этим, момент
импульса замкнутой
системы относительно любой неподвижной
точки не изменяется со временем.
Аналогично
ситуации с законом
сохранения энергии,
при переходе к искривлённому пространству-времени закон
сохранения импульса, выражаемый
пространственными компонентами
соотношения для тензора
энергии-импульса
 где
точка с запятой выражает ковариантную
производную,
приводит лишь к локально сохраняющимся
величинам. Это связано с отсутствием
глобальной однородности пространства
в пространстве-времени общего вида.
где
точка с запятой выражает ковариантную
производную,
приводит лишь к локально сохраняющимся
величинам. Это связано с отсутствием
глобальной однородности пространства
в пространстве-времени общего вида.
Можно
придумать такие определения импульса
гравитационного поля, что глобальный
закон сохранения импульса будет
выполняться при движении во времени
системы тел и полей, но все такие
определения содержат элемент произвола,
так как вводимый импульс гравитационного
поля не может быть тензорной величиной
при произвольных преобразованиях
координат.
Кинетическая
энергия тела,
движущегося произвольным образом, равна
сумме кинетических энергий всех n
материальных точек па которые это тело
можно разбить: Если тело вращается вокруг неподвижной
оси с угловой скоростью
Если тело вращается вокруг неподвижной
оси с угловой скоростью  , то
линейная скорость i-ой точки равна
, то
линейная скорость i-ой точки равна  где
где -
расстояние от этой точки до оси вращения.
Следовательно.
-
расстояние от этой точки до оси вращения.
Следовательно. где
где
 -
момент инерции тела относительно оси
вращения.
В
общем случае движение твердого тела
можно представить в виде суммы двух
движений - поступательного со скоростью,
равной скорости
-
момент инерции тела относительно оси
вращения.
В
общем случае движение твердого тела
можно представить в виде суммы двух
движений - поступательного со скоростью,
равной скорости
 центра
инерции тела, и вращения с угловой
скоростью
центра
инерции тела, и вращения с угловой
скоростью
 вокруг
мгновенной оси, проходящей через центр
инерции. При этом выражение для
кинетической энергии тела преобразуется
к виду
вокруг
мгновенной оси, проходящей через центр
инерции. При этом выражение для
кинетической энергии тела преобразуется
к виду где
где -
момент инерции тела относительно
мгновенной оси вращения, проходящей
через центр инерции.
-
момент инерции тела относительно
мгновенной оси вращения, проходящей
через центр инерции.
Движущиеся
части механизмов обычно бывают соединены
частями. Подвижное соединение нескольких
звеньев образует кинематическую связь.
Тело человека – пример кинематической
связи. Опорно-двигательная система
человека, состоящая из сочлененных
между собой костей скелета и мышц,
представляет с точки зрения физики
совокупность рычагов, удерживаемых
человеком в равновесии. В анатомии
различают рычаги силы, в которых
происходит выигрыш в силе, но проигрыш
в перемещении, и рычаги скорости, в
которых, проигрывая в силе, выигрывают
в скорости перемещения. Хорошим примером
рычага скорости является нижняя челюсть.
Действующая сила осуществляется
жевательной мышцей. Противодействующая
сила – сопротивление раздавливаемой
пищи – действует на зубы. Плечо действующей
силы значительно короче, чем у сил
противодействия, поэтому жевательная
мышца короткая и сильная. Когда надо
разгрызть что-либо зубами, уменьшается
плечо силы сопротивления.
Если
рассматривать скелет как совокупность
отдельных звеньев, соединенных в один
организм, то окажется, что все эти звенья
при нормальной стойке образуют систему,
находящуюся в крайне неустойчивом
равновесии. Так, опора туловища
представлена шаровыми поверхностями
тазобедренного сочленения. Центр массы
туловища расположен выше опоры, что при
шаровой опоре создает неустойчивое
равновесие. То же относится и к коленному
соединению, и к голеностопному. Все эти
звенья находятся в состоянии неустойчивого
равновесия.
Центр
массы тела человека при нормальной
стойке расположен как раз на одной
вертикали с центрами тазобедренного,
коленного и голеностопного сочленений
ноги, на 2–2,5 см ниже мыса крестца и
на 4–5 см выше тазобедренной оси.
Таким образом, это самое неустойчивое
состояние нагроможденных звеньев
скелета. И если вся система держится в
равновесии, то только благодаря
постоянному напряжению поддерживающих
мышц.
Механическая
работа, которую способен совершить
человек в течение дня, зависит от многих
факторов, поэтому трудно указать
какую-либо предельную величину. Это
относится и к мощности. Так, при
кратковременных усилиях человек может
развивать мощность порядка нескольких
киловатт. Если спортсмен массой 70 кг
подпрыгивает с места так, что его центр
массы поднимается на 1 м по отношению
к нормальной стойке, а фаза отталкивания
длится 0,2 с, то он развивает мощность
около 3,5 кВт. При ходьбе человек совершает
работу, так как при этом энергия
затрачивается на периодическое небольшое
поднятие конечностей, главным образом
ног.
Работа
обращается в нуль, если перемещения
нет. Поэтому, когда груз находится на
опоре или подставке или подвешен на
шест, сила тяжести не совершает работы.
Однако, если держать неподвижно на
вытянутой руке гирю или гантель,
отмечается усталость мышц руки и плеча.
Точно так же устают мышцы спины и
поясничной области, если сидящему
человеку поместить на спину груз.
8.
Гармонические
колебания, колебания,
при которых физическая величина
изменяется с течением времени по закону
синуса или косинуса. Графически Г. к.
изображаются кривой — синусоидой или
косинусоидой (см. рис.);
они могут быть записаны в форме: х
= Asin (wt + j) или х
= Acos (wt + j),
где х—
значение колеблющейся величины в данный
момент времени t (для
механических Г. к., например, смещение
или скорость, для электрических Г. к. —
напряжение или сила тока), А —
амплитуда колебаний, w —
угловая частота колебаний, (w + j)
— фаза колебаний, j —
начальная фаза колебаний.
геометрический способ представления
колебаний с помощью вектора амплитуды
При гармонических колебаниях
периодически происходит переход
потенциальной энергии в кинетическую
и обратно.
Превращение энергии при движении
пружинного маятника снизу вверх:
Кинетическая энергия тела
 Потенциальная энергия упруго сжатого
тела
Потенциальная энергия упруго сжатого
тела где k - жесткость пружины,
x - смещение груза.
где k - жесткость пружины,
x - смещение груза.
Полная механическая энергия системы В положении равновесия и в
крайних точках:
В положении равновесия и в
крайних точках: В промежуточных точках:
В промежуточных точках:

-
Колебания,
энергия которых уменьшается с течением
времени за счет действия сил сопротивления,
называются затухающими.
|
Сложение
гармонических колебаний одного
направления и одинаковой частоты.
Биения
|
|
|
|
|
Колеблющееся
тело может принимать участие в
нескольких колебательных процессах,
тогда следует найти результирующее
колебание, другими словами, колебания
необходимо сложить. В данном разделе
будем складывать гармонические
колебания одного направления и
одинаковой частоты

применяя
метод вращающегося вектора амплитуды,
построим графически векторные
диаграммы этих колебаний (рис. 1). Tax
как векторы A1 и A2 вращаются
с одинаковой угловой скоростью ω0,
то разность фаз (φ2 - φ1)
между ними будет оставаться постоянной.
Значит, уравнение результирующего
колебания будет 
В
формуле (1) амплитуда А и начальная
фаза φ соответственно определяются
выражениями 

Значит,
тело, участвуя в двух гармонических
колебаниях одного направления и
одинаковой частоты, совершает при
этом также гармоническое колебание
в том же направлении и с той же
частотой, что и складываемые колебания.
Амплитуда результирующего колебания
зависит от разности фаз (φ2 -
φ1) складываемых колебаний.
Сложение
взаимно-перпендик. Колебаний. Найдем
результат сложения двух гармонических
колебаний одинаковой частоты ω,
которые происходят во взаимно
перпендикулярных направлениях вдоль
осей х и у. Начало отсчета для простоты
выберем так, чтобы начальная фаза
первого колебания была равна нулю,
и запишем это в виде  где α — разность фаз
обоих колебаний, А и В равны амплитудам
складываемых колебаний. Уравнение
траектории результирующего колебания
определим исключением из формул (1)
времени t. Записывая складываемые
колебания как
где α — разность фаз
обоих колебаний, А и В равны амплитудам
складываемых колебаний. Уравнение
траектории результирующего колебания
определим исключением из формул (1)
времени t. Записывая складываемые
колебания как 

и
заменяя во втором уравнении
 на
на
 и sinwt
на
и sinwt
на
 получим после
несложных преобразований уравнение
эллипса, оси которого ориентированы
относительно координатных
осей произвольно:
получим после
несложных преобразований уравнение
эллипса, оси которого ориентированы
относительно координатных
осей произвольно: Так как траектория
результирующего колебания имеет
форму эллипса, то такие колебания
называются эллиптически
поляризованными.
Так как траектория
результирующего колебания имеет
форму эллипса, то такие колебания
называются эллиптически
поляризованными.
Сложное
периодическое движение — сложное
колебание — можно представить в
виде суммы гармонических колебаний.
Существуют математические методы
обработки сложных колебаний. Фурье
предложил метод разложения любой
периодической функции в ряд
гармонических функций, периоды
которых кратны периоду сложного
колебания. Разложение сложного
колебания на гармонические колебания
называется гармоническим анализом.
Совокупность гармонических колебаний,
на которые разложено сложное
колебание, называется гармоническим
спектром сложного колебания. Пример
сложного колебания x(t), которое
раскладывается на сумму двух
гармонических колебаний, представлен
на рис. 10.4.
10.Собственные
колебания, свободные колебания,
колебания в механической, электрической
или какой-либо другой физической
системе, совершающиеся при отсутствии
внешнего воздействия за счёт
первоначально накопленной энергии
(вследствие наличия начального
смещения или начальной скорости).
Характер С. к. определяется главным
образом собственными параметрами
системы (массой, индуктивностью,
ёмкостью, упругостью). В реальных
системах вследствие рассеяния
энергии С. к. всегда затухающие, а
при больших потерях они становятся
апериодическими.
Затухающие
колебания — колебания, энергия
которых уменьшается с течением
времени. Бесконечно длящийся процесс
вида  в
природе невозможен. Свободные
колебания любого осциллятора рано
или поздно затухают и прекращаются.
Поэтому на практике обычно имеют
дело с затухающими колебаниями. Они
характеризуются тем, что амплитуда
колебаний A является
убывающей функцией. Обычно затухание
происходит под действием сил
сопротивления среды, наиболее часто
выражаемых линейной зависимостью
от скорости колебаний в
природе невозможен. Свободные
колебания любого осциллятора рано
или поздно затухают и прекращаются.
Поэтому на практике обычно имеют
дело с затухающими колебаниями. Они
характеризуются тем, что амплитуда
колебаний A является
убывающей функцией. Обычно затухание
происходит под действием сил
сопротивления среды, наиболее часто
выражаемых линейной зависимостью
от скорости колебаний  или
её квадрата. или
её квадрата.
Логарифмический
декремент колебаний —
безразмерная физическая
величина, описывающая
уменьшение амплитуды колебательного
процесса и равная натуральному
логарифму отношения двух
последовательных амплитуд колеблющейся
величины в одну и ту же сторону:
 Логарифмический
декремент колебаний равен декременту,
умноженному на период колебаний: Логарифмический
декремент колебаний равен декременту,
умноженному на период колебаний:
λ = δT
Вынужденные
колебания, колебания, возникающие
в какой-либо системе под действием
переменной внешней силы (например,
колебания мембраны телефона под
действием переменного магнитного
поля, колебания механической
конструкции под действием переменной
нагрузки и т.д.). Характер В. к.
определяется как характером внешней
силы, так и свойствами самой системы.
В начале действия периодической
внешней силы характер В. к. изменяется
со временем (в частности, В. к. не
являются периодическими), и лишь по
прошествии некоторого времени в
системе устанавливаются периодические
В. к. с периодом, равным периоду
внешней силы (установившиеся В. к.).
Установление В. к. в колебательной
системе происходит тем быстрее, чем
больше затухание
колебаний в этой системе.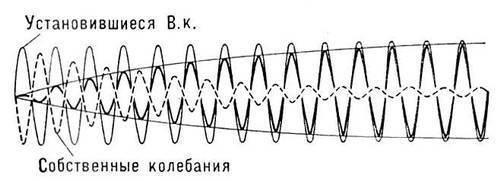
уравнение
вынужденных колебаний
Y”+ 2δy’+ ω02 y=Fmax/m*
cos(ωt)
Резона́нс (фр. resonance,
от лат. resono —
откликаюсь) — явление резкого
возрастания амплитуды вынужденных
колебаний, которое наступает при
приближении частоты внешнего
воздействия к некоторым значениям
(резонансным частотам), определяемым
свойствами системы.
Увеличение амплитуды — это
лишь следствие резонанса,
а причина —
совпадение внешней (возбуждающей)
частоты с внутренней (собственной)
частотой колебательной системы. При
помощи явления резонанса можно
выделить и/или усилить даже весьма
слабые периодические колебания.
Резонанс — явление, заключающееся
в том, что при некоторой частоте
вынуждающей силы колебательная
система оказывается особенно
отзывчивой на действие этой силы.
Степень отзывчивости в теории
колебаний описывается величиной,
называемой добротность.
Явление резонанса впервые было
описано Галилео
Галилеем в
1602 г в работах, посвященных
исследованию маятников и музыкальных
струн.
11.
Если в каком-либо месте упругой
(твердой, жидкой или газообразной)
среды возбудить колебания ее частиц,
то вследствие взаимодействия между
частицами это колебание начнет
распространяться в среде с некоторой
скоростью v. Процесс распространения
колебаний называется волной. Частицы
среды, в которой распространяется
волна, не переносятся волной, они
лишь совершают колебания около своих
положений равновесия. В зависимости
от направления колебания частиц по
отношению к направлению, в котором
распространяется волна, различают
продольные и поперечные волны. В
продольной волне частицы среды
колеблются вдоль направления
распространения волны. В поперечной
волне частицы среды колеблются в
направлениях, перпендикулярных к
направлению распространения волны.
Механические поперечные волны могут
возникнуть лишь в среде, обладающей
сопротивлением сдвигу. Поэтому в
жидкой и газообразной средах возможно
возникновение только продольных
волн. В твердой среде возможно
возникновение как продольных, так
и поперечных волн. В продольных
волнах вследствие совпадения
направлений колебаний частиц и волны
появляются сгущения и разрежения. Фронт
волны представляет собой ту
поверхность, которая отделяет часть
пространства, уже вовлеченную в
волновой процесс, от области, в
которой колебания еще не возникли
Волновой
фронт все время перемещается.
Фронт
волны представляет собой ту
поверхность, которая отделяет часть
пространства, уже вовлеченную в
волновой процесс, от области, в
которой колебания еще не возникли
Волновой
фронт все время перемещается.
Волновые
поверхности могут быть любой формы.
В простейших случаях они имеют форму
плоскости или сферы. Соответственно
волна в этих случаях называется
плоской или сферической. В плоской
волне волновые поверхности представляют
собой множество параллельных друг
другу плоскостей, в сферической
волне — множество концентрических
сфер.
Расстояние  ,
на которое распространяется волна
за время, равное периоду колебаний
частиц среды, называется длиной
волны .
Очевидно, что ,
на которое распространяется волна
за время, равное периоду колебаний
частиц среды, называется длиной
волны .
Очевидно, что =vТ, (1.1) =vТ, (1.1)
где v –
скорость волны, Т – период колебаний.
Длину волны можно определить также
как расстояние между ближайшими
точками среды, колеблющимися с
разностью фаз, равной 2П. Заменив в
соотношении (1.1) Т через 1/  ( (  –
частота колебаний), получим –
частота колебаний), получим
  =
v =
v
В
1826 г. Колладон и Штурм произвели на
Женевском озере следующий опыт. На
одной лодке производилась вспышка
пороха и одновременно молоток ударял
по колоколу, опущенному в воду. На
другой лодке, находившейся на
расстоянии 14 км от первой, измерялось
время между вспышкой и появлением
звука в рупоре, также опущенном в
воду. Скорость звука в воде при 8°С
оказалась равной 1435 м/с.Измеряя
запаздывание звука по сравнению со
светом, можно получить правильное
значение скорости звука, очевидно,
лишь в том случае, если временем
распространения света можно
пренебречь. В условиях обычных
наблюдений это допущение вполне
приемлемо, ибо, как показывают
измерения, скорость распространения
световых и вообще электромагнитных
волн в вакууме (а практически и в
воздухе) равна приблизительно 300000
км/с.
Уравнения
Максвелла являются дифференциальными
уравнениями первого порядка по
координатам и времени. Однако, во
второй паре в каждое уравнение входят
обе неизвестные векторные функции
 и
и
 При
отсутствии зарядов и токов можно
перейти к уравнениям второго порядка,
каждое из которых зависит только от
одного, электрического или магнитного
поля:
При
отсутствии зарядов и токов можно
перейти к уравнениям второго порядка,
каждое из которых зависит только от
одного, электрического или магнитного
поля:
Поток
энергии упругой волны через любую
поверхность можно определить
интегрированием скалярного
произведения вектора Умова на
векторный элемент площадки dS(вектор
dS напрвален по нормали к площадке
ds):
 Здесь
Sn- нормальная к площадке ds составляющая
вектора S. Наконец, среднее по времени
значение потока энергии упругой
волны через поверхность:
Здесь
Sn- нормальная к площадке ds составляющая
вектора S. Наконец, среднее по времени
значение потока энергии упругой
волны через поверхность:
12.
Акустика – область физики, исследующая
упругие колебания и волны от самых
низких частот до предельно высоких
(1012–1013 Гц). Современная акустика
охватывает широкий круг вопросов,
в ней выделяют ряд разделов: физическая
акустика, которая изучает особенности
распространения упругих волн в
различных средах, физиологическая
акустика, изучающая устройство
звуковоспринимающих и звукооб-разующих
органов у человека и животных, и др.
Под
акустикой понимают учение о звуке,
т. е. об упругих колебаниях и волнах
в газах, жидкостях и твердых телах,
воспринимаемых человеческим ухом
(частоты от 16 до 20 000 Гц).
Слух
является объектом слуховых ощущений,
поэтому оценивается человеком
субъективно. Воспринимая тоны,
человек различает их по высоте.
Высота
– субъективная характеристика,
обусловленная прежде всего частотой
основного тона. В значительно меньшей
степени высота зависит от сложности
тона и его интенсивности: звук большей
интенсивности воспринимается как
звук более низкого тона.
Тембр
звука почти исключительно определяется
спектральным составом. Разные
акустические спектры соответствуют
разному тембру, хотя основной тон
и, следовательно, высота тона
одинаковы.
Громкость
характеризует уровень слухового
ощущения. Несмотря на субъективность,
громкость может быть оценена
количественно путем сравнения
слухового ощущения от двух источников.
В основе создания шкалы уровней
громкости лежит психофизический
закон Вебера-Фехнера. Согласно этому
закону, если увеличивать раздражение
в геометрической прогрессии (т. е.
в одинаковое число раз), то ощущение
этого раздражения возрастает в
арифметической прогрессии (т. е.
на одинаковую величину). Применительно
к звуку это означает, что если
интенсивность звука принимает ряд
последовательных значений, например
а10, а210, а310 (а – некоторый коэффициент,
а > I) и так далее, то соответствующее
им ощущение громкости звука равно
Е0, 2Е0, 3Е0 и т. д. Математически это
означает, что громкость звука
пропорциональна логарифму интенсивности
звука. Если действуют два звуковых
раздражения с интенсивностями I и
I0, причем I0 – порог слышимости, то
на основании закона Вебера-Фехнера
громкость относительно него связана
с интенсивностями следующим образом:
 где
k – некоторый коэффициент
пропорциональности, зависящий от
частоты и интенсивности. Метод
измерения остроты звука называют
аудио-метрией. При аудиометрии на
специальном приборе (аудиометре)
определяют порог слухового ощущения
на разных частотах; полученная кривая
называется ау-диограммой. Сравнение
аудиограммы больного человека с
нормальной кривой порога слухового
о
Кривые
равной громкости (см. рис. А-6)
показывают, какая требуется разница
в уровне звукового давления, чтобы
звуки всех частот воспринимались с
такой же громкостью, как референсный
синусоидальный сигнал с частотой 1
кГц. Числа, находящиеся над каждой
кривой, представляют собой меру
громкости, выраженную вфонах. На
референсной частоте 1 кГц фоны равны
децибелам. щущения помогает
диагностировать заболевание органов
слуха.
где
k – некоторый коэффициент
пропорциональности, зависящий от
частоты и интенсивности. Метод
измерения остроты звука называют
аудио-метрией. При аудиометрии на
специальном приборе (аудиометре)
определяют порог слухового ощущения
на разных частотах; полученная кривая
называется ау-диограммой. Сравнение
аудиограммы больного человека с
нормальной кривой порога слухового
о
Кривые
равной громкости (см. рис. А-6)
показывают, какая требуется разница
в уровне звукового давления, чтобы
звуки всех частот воспринимались с
такой же громкостью, как референсный
синусоидальный сигнал с частотой 1
кГц. Числа, находящиеся над каждой
кривой, представляют собой меру
громкости, выраженную вфонах. На
референсной частоте 1 кГц фоны равны
децибелам. щущения помогает
диагностировать заболевание органов
слуха.

|
|

