

Mensch und Fahrzeug
.pdf124 |
3 Lenken – Fahrzeugführung quer |
In Bild 3-34 ist angenommen, dass sich das Fahrzeug mit der Geschwindigkeit v nach vorn bewegt. Durch eine zufällige Störung schließt die Fahrzeuglängsachse mit der Fahrtrichtung den Winkel Ε ein. Damit entstehen an den Rädern Seitenkräfte, die für kleine Winkel Ε diesen proportional sind: Sv = kv · Ε für die Vorderachse, Sh = kh · ß für die Hinterachse. Um die Hochachse entsteht ein Moment kh · Ε · a – kv · Ε · a, das linksdrehend sein muss, wenn die Fahrzeuglängsachse in die Fahrtrichtung zurückkehren soll. Das Fahrzeug ist stabil für kv < kh. Der Seitenkraftbeiwert vorn kv muss kleiner als der hinten kh sein, kv < kh. Hat das Vorderrad einen Nachlauf und lässt der Fahrer das Lenkrad los (free control), dann ist kv = 0 und die Forderung nach Stabilität erfüllt. Hält der Fahrer das Lenkrad aber fest (fixed control), dann muss durch andere konstruktive Maßnahmen für kv < kh gesorgt werden.
Im mittleren Bild ist angenommen, dass das Hinterrad blockiert. Es entsteht eine gegen die Bewegungsrichtung gerichtete Bremskraft Bh, die das Moment Bh · a · Ε um die Hochachse erzeugt. Vom Vorderrad stammt das Moment –kv · Ε · a, das kleiner sein muss, wenn das Fahrzeug stabil sein soll. Die Forderung ist also kv < Bh. Sie ist in der Regel nicht erfüllt, weil z. B. für einen PKW kv = 50000 N/rad und Bh = 5000 N.
Im rechten Bild ist angenommen, dass das Vorderrad blockiert und damit das abdrehende Moment – kv · a · Ε um die Hochachse erzeugt, dem das Moment von der Hinterachse kh · Ε · a entgegensteht. Stabil ist die Fahrtrichtung für Bv · a · Ε < kh · Ε · a, oder BV < kh. Diese Forderung ist in der Regel erfüllt (z. B. für einen PKW: kh = 80 000, Bv = 8000).
Ein Fahrzeug mit gleicher Vorderund Hinterachslast (av = ah) ist stabil, wenn kv < kh. Nach einer Störung verschwindet der Winkel zwischen Fahrzeuglängsachse und Bewegungsrichtung. Ist kv > kh, wird die Störung immer größer, das Fahrzeug ist instabil.
Wird an einer Achse blockierend gebremst (rechts), dann muss kv < Bh (Bh = Bremskraft hinten) oder Bv < kh (Bv = Bremskraft vorn) sein, wenn das Fahrzeug stabil sein soll. kv und kh sind z. B. für einen PKW 50 bis 100 kN/rad groß, die Bremskraft je nach Griffigkeit der Fahrbahn kleiner als 10 kN. Das heißt: Stabilität, wenn vorn gebremst wird, Instabilität beim blockierenden Bremsen hinten. Autos waren in den ersten 30 Jahren nur mit Bremsen an den Hinterrädern ausgerüstet. Das Ford Modell T hatte am Ende seines Lebenszyklus zwar einen elektrischen Starter, aber noch immer keine Vorderradbremsen.
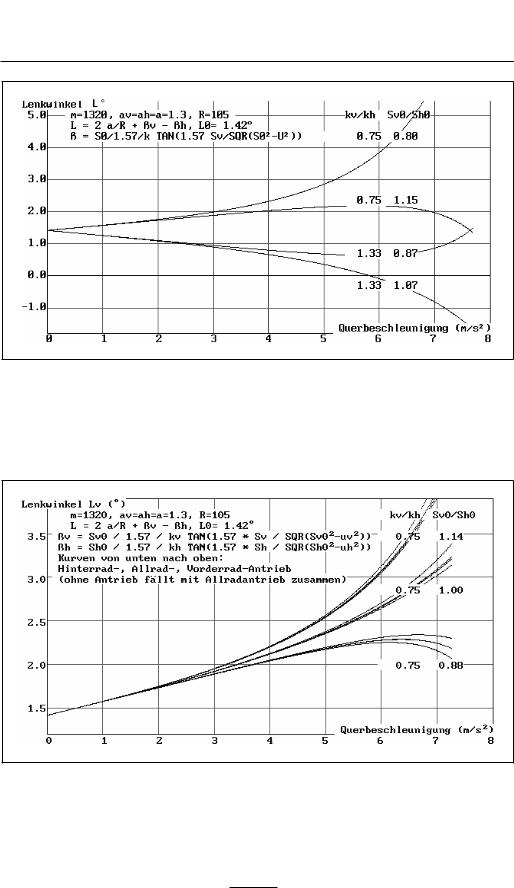
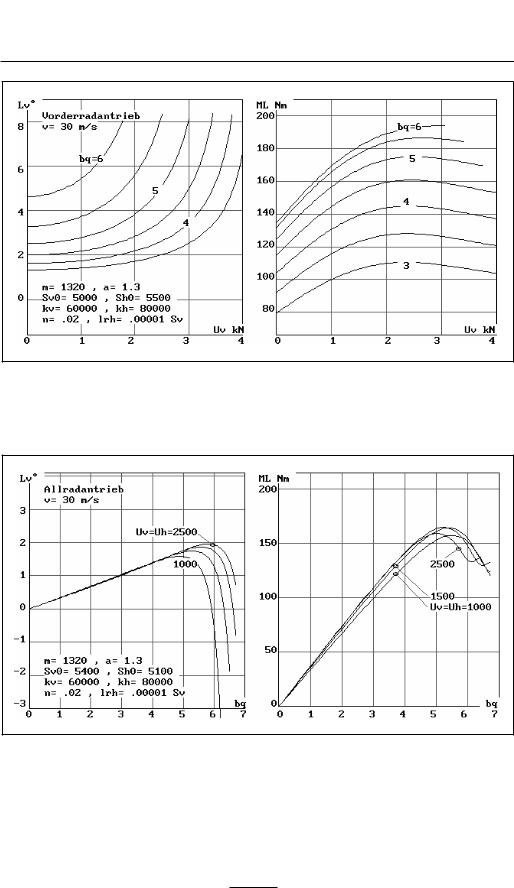
Der erforderliche Lenkwinkel verändert sich mit der Querbeschleunigung, Bild 3-35. Je nach dem ob kh > kv oder umgekehrt nimmt der erforderliche Lenkwinkel L mit der Querbeschleunigung ab oder zu (unteroder übersteuerndes Fahrverhalten, kurvenunwilliges oder kurvengieriges Fahrzeug). Weil aus Stabilitätsgründen kv < kh, sind die Fahrzeuge untersteuernd. Ändert sich das Verhältnis kv/kh mit der Querbeschleunigung, dann kann sich diese Eigenschaft mit der Querbeschleunigung ändern. Deutlich tritt diese Erscheinung je nach Antrieb vorn oder hinten auf, Bild 3-36.
3.3 Stationäres Fahren |
125 |
Bild 3-35 Erforderlicher Lenkwinkel L für eine Kreisfahrt von 105 m Radius für unterschiedliche Seitenkraftbeiwerte. Je nach dem wie sich der Zusammenhang von S und ß verändert (beeinflussbar durch die Rollmomentabstützung, Reifengröße, Reifenluftdruck) wird aus dem untersteuernden Fahrzeug mit kv/kh = 0.75 ein übersteuerndes oder aus dem übersteuernden (kv/kh = 1,33) ein untersteuerndes.
Bild 3-36 Wie Bild 3-35, aber mit Umfangskräften entsprechend Bild 3.4-3. Hinterradantrieb verringert den erforderlichen Lenkwinkel, Vorderradantrieb vergrößert ihn. Allradantrieb (Aufteilung 50:50) liegt praktisch auf dem Bedarf für ohne Antrieb. Die erforderliche Antriebskraft (nicht dargestellt) ist beim Vorderradantrieb größer: das Fahrzeug bremst sich stärker ab.
126 |
3 Lenken – Fahrzeugführung quer |
|
|
|
|
|
|
|
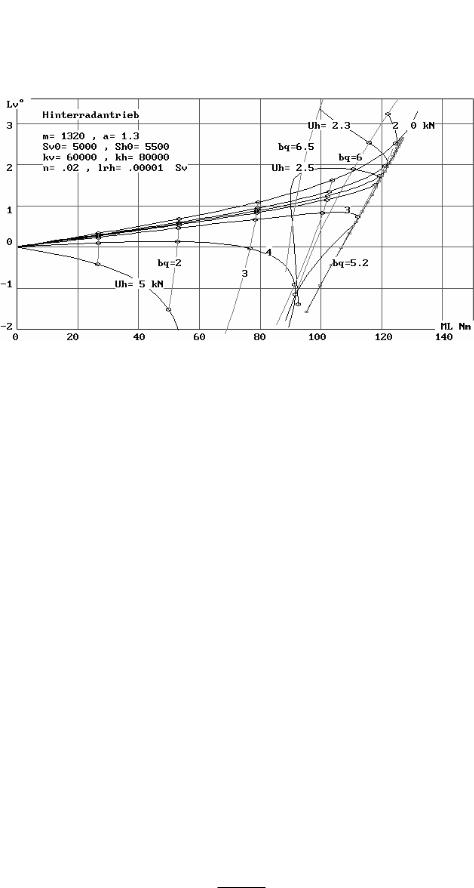
Bild 3-37 Erforderlicher Lenkwinkel Lv und Lenkmoment ML für ein hinterradgetriebenes Fahrzeug (Uh = 0 bis 5 kN) mit zunehmender Querbeschleunigung bq vorn. Mit steigender Antriebskraft Uh nehmen Lenkwinkel und Lenkmoment zunächst stetig zu. Bei weiter steigender Umfangskraft Uh nimmt dann erst das Lenkmoment ML, dann auch der Lenkwinkel Lv ab.
Lenkwinkel L und Lenkmoment ML
Normalerweise erwartet der Fahrer einen mit der Querbeschleunigung zunehmenden Lenkwinkelbedarf und ein dazu proportionales Lenkmoment. Für größere Querbeschleunigungen und Antriebskräfte trifft das beim Hinterradantrieb nicht zu, Bild 3-37.
Trägt man den Lenkwinkel Lv über dem Lenkmoment ML auf, dann ergeben sich verschlungene Kurven. Bei kleinen Antriebskräften Uh krümmen sich die Kurven nach oben um mit steigenden Uh sich nach unten zu krümmen und ab Uh = 2.8 kN sich gleich nach unten zu krümmen. Bild 3-38 zeigt einen Ausschnitt aus dem Diagramm 3-37: bei der Antriebskraft Uh = 2500 N werden die Querbeschleunigungen 5.6 bis 6.6 m/s2 mit dem fast gleichen Lenkwinkel Lv aber den Lenkmomenten ML = 120 bis 90 Nm gefahren. Das Lenkmoment liefert dem Fahrer die notwendige Information um sich mit sinkendem Lenkmoment an die maximal mögliche Querbeschleunigung heranzutasten. Es ist hier die Frage zu stellen, ob das Fahrzeug nicht ohnehin mehr mit dem Lenkmoment als mit dem Lenkwinkel gesteuert wird. Eine Frage, die für Fahrzeuge mit Knüppelsteuerung essentiell ist.
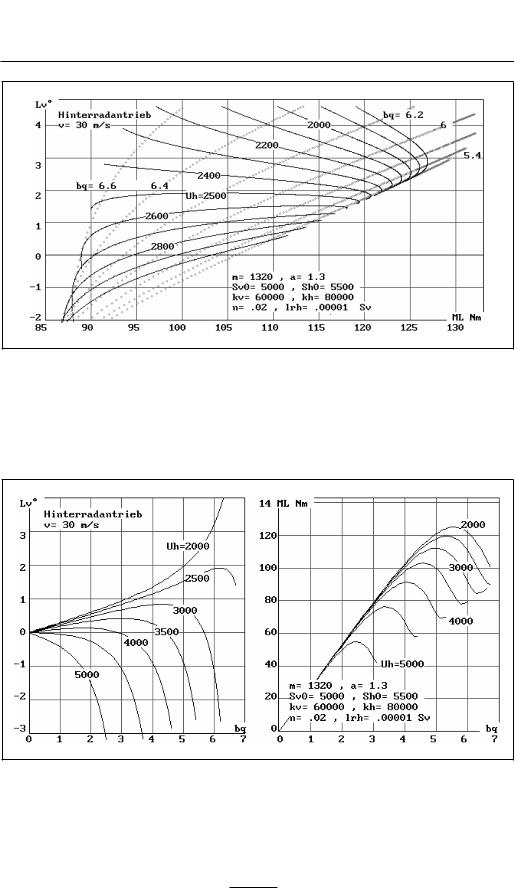
Einfacher ist die Darstellung Lv und ML als Funktion der Querbeschleunigung, Bild 3-39, aufschlussreich Lv und ML als Funktion der Umfangskraft hinten Uh, Bild 3-40. Hervorgehoben ist dort die Uh = 2500 N, wo mit fast dem gleichen Lenkwinkel Lv die Querbeschleunigungen bq = 5.6 bis 6.6 m/s2 gefahren werden können (links) und das Lenkmoment ML ein Maximum durchläuft (rechts). Während es bis bq = 5.5 m/s2 steigt, fällt es ab dann mit zunehmender Querbeschleunigung.
3.3 Stationäres Fahren |
127 |
Bild 3-38 Ein Ausschnitt aus Bild 3-37 für bq > 5.4 m/s2. Fährt der Fahrer z. B. mit einer Umfangskraft am Hinterrad von Uh = 2500, dann kann er durch eine kleiner Veränderung der Gaspedalstellung (und damit von Uh) bei stillgehaltener Lenkung (Lv = 1.92°) die Querbeschleunigung, bzw. die Krümmung der Fahrspur einstellen. Das Lenkmoment informiert ihn dabei über die Querbeschleunigung: es fällt mit steigender bq und umgekehrt.
Bild 3-39 Lenkwinkel Lv und Lenkmoment ML, abhängig von der Querbeschleunigung für Hinterradantrieb. Zwischen bq = 6 und 6.4 kann der Fahrer bei fast unverändertem Lenkwinkel das Fahrzeug führen.
128 |
3 Lenken – Fahrzeugführung quer |
|
|
|
|
|
|
|
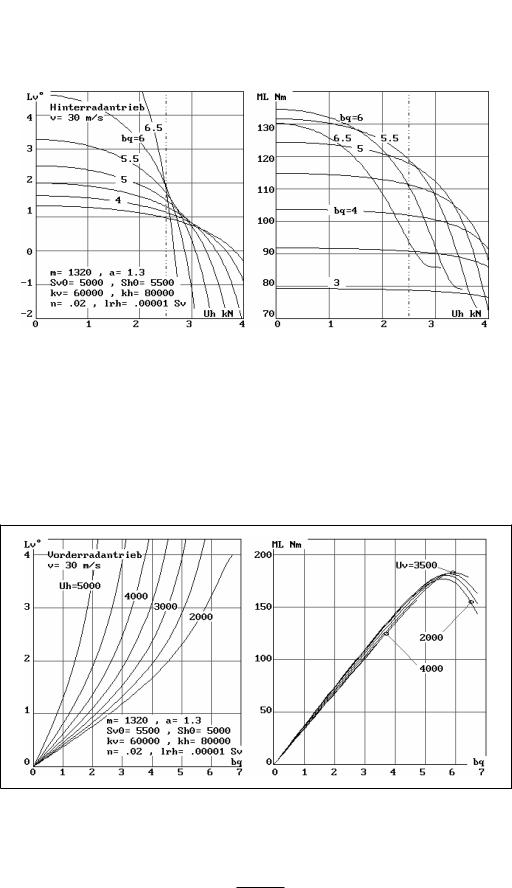
Bild 3-40 Lenkwinkel Lv (links) und Lenkmoment ML abhängig von der Abtriebskraft an der Hinterachse Uh für verschiedene Querbeschleunigungen bq.
Hervorgehoben ist Uh = 2500 N, bei der das Lenkmoment bei bq = 5.5 m/s2 maximal ist und nach höheren Querbeschleunigungen rasch abfällt. Der Lenkwinkel Lv (links) muss dazu nur ganz wenig vergrößert werden: die Lenkung ist sehr empfindlich, reagiert auf kleine Lenkwinkeländerungen mit großen Veränderungen von Lenkmoment ML und Querbeschleunigung bq.
Bei Vorderachsantrieb sind die Verhältnisse einfacher, Bild 3-41 und 3-42. Bei Allradantrieb liegen sie dazwischen, Bild 3-43 und 3-44.
Bild 3-41 Lenkwinkel Lv und Lenkmoment ML abhängig von der Querbeschleunigung fürVorderradantrieb. Im Vergleich zum Hinterradantrieb 3-39 ist der Verlauf weit weniger dramatisch.
3.3 Stationäres Fahren |
129 |
Bild 3-42 Lenkwinkel Lv (links) und Lenkmoment ML abhängig von der Antriebskraft an der Vorderachse Uv für verschiedene Querbeschleunigungen bq.
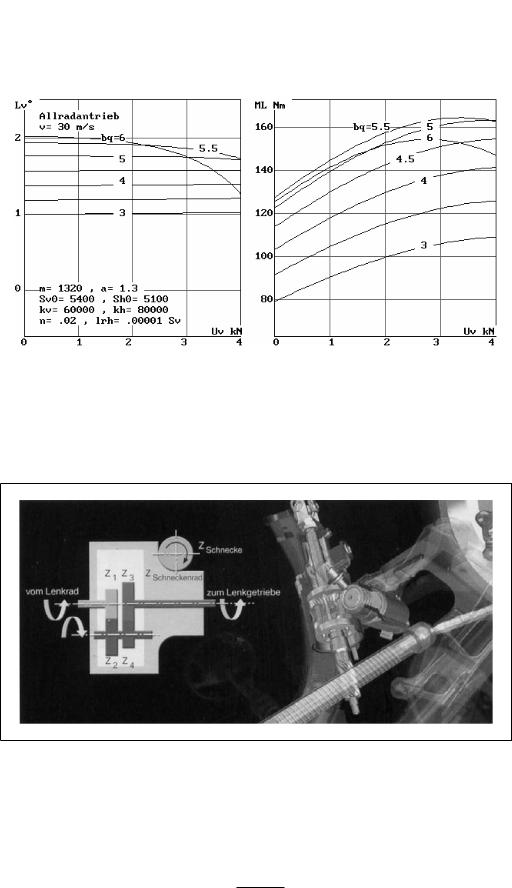
Bild 3-43 Lenkwinkel Lv und Lenkmoment ML abhängig von der Querbeschleunigung für Allradantrieb.
130 |
3 Lenken – Fahrzeugführung quer |
|
|
|
|
|
|
|
Bild 3-44 Lenkwinkel Lv (links) und Lenkmoment ML, abhängig von der Antriebskraft bei Allradantrieb (50–50) für verschiedene Querbeschleunigungen bq. Der Lenkwinkelbedarf fällt erst bei Querbeschleunigungen über 5 m/s2 merklich ab. Dort verringert sich auch das Lenkmoment ML und zeigt damit dem Fahrer die Annäherung an die Grenze an.
Bild 3-45 Überlagerungsgetriebe der Aktivlenkung, die den vom Fahrer eingegebenen Lenkwinkel geschwindigkeitsabhängig vergrößert.
3.3 Stationäres Fahren |
131 |
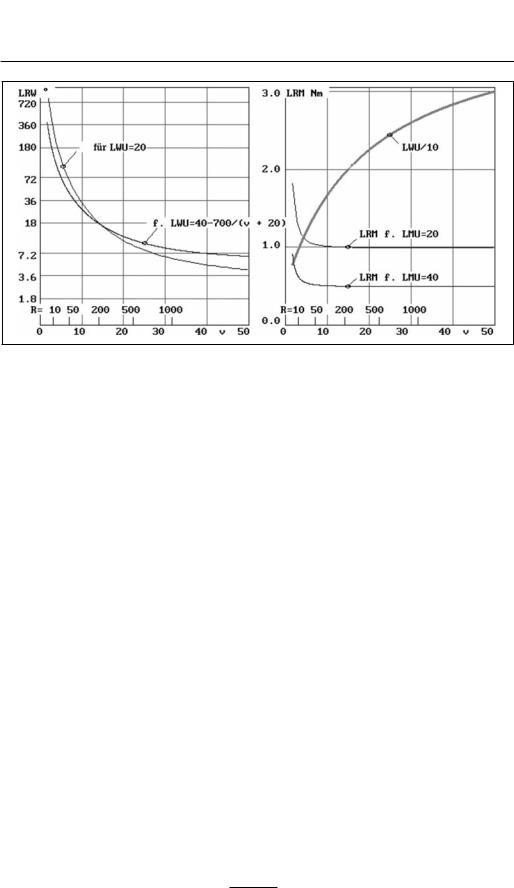
Bild 3-46 Links: Lenkradwinkel LRW abhängig von der Fahrgeschwindigkeit v (m/s), bzw. dem Kurvenradius R, Querbeschleunigung bq = 1 m/s2 für konstante Lenkwinkelübersetzung LWU = 20 und Geschwindigkeitsabhängige
LWU = 40 – 700/(v + 20)
Rechts: Lenkradmoment LRM für die Lenkmomentübersetzung LMU = 20 und LMU = 40 und zugehörige Lenkwinkelübersetzung LWU
Unter dem Begriff Servolenkung wird meist eine Lenkraftunterstützung verstanden, obwohl sich der Servo auch auf den Lenkwinkel beziehen kann. Das geschieht z. B. bei der Aktivlenkung, die im ATZ-Sonderheft Der neue BMW 5er, August 2003, S. 100, Bild 3, beschrieben ist. Ein Servomotor addiert einen vom Lenkradwinkel LWR und der Fahrgeschwindigkeit abhängigen Lenkwinkel dazu. Die Übersetzung zwischen LRW und Lenkwinkel am Rad L ist dann nicht mehr konstant (z. B. 20), sondern von der Fahrgeschwindigkeit abhängig, z. B. LRW/L = LWU = 40 – 700/(v + 20). Dabei bleibt aber die Lenkmomentübersetzung konstant 40. Es ergeben sich die in Bild 3-46 dargestellten Verhältnisse. Für kleine Fahrgeschwindigkeiten (v = 2 m/s) sind im Vergleich zu einer Lenkung mit konstanter Übersetzung LWU = 20 Lenkradwinkel LRW und Lenkmoment am Lenkrad etwa halb so groß, bei großer Fahrgeschwindigkeit (z. B. v = 50 m/s) der LRW 50 % größer, das Lenkmoment halb so groß. Die Lenkwinkelübersetzung LWU ist 8.2, bzw. 30. Die Lenkarbeit für den Fahrer ist 20.5, bzw. 75 % der Lenkarbeit wie mit der konstanten LWU = 20. In Bild 3-46 sind Lenkradwinkel LRW und Lenkradmoment MLR abhängig von der Fahrgeschwindigkeit bei einer Querbeschleunigung von bq = 1 m/s2 für eine Lenkung mit konstanter Übersetzung LWU = 20 und einer Aktivlenkung mit LWU = 40 – 700/(v + 20) dargestellt. Die Lenkmomentübersetzung LMU ist konstant 20 bzw. 40. Bild 3-45 vergleicht die Rechenergebnisse mit Messwerten aus dem genannten Sonderheft, dort S. 92, Bild 7. Bild 3-46 zeigt eine andere Auslegung einer Aktivlenkung, bei der die Lenkwinkelübersetzung LWU = 20 (1 + .01 (v – 24)2) bis zur Geschwindigkeit 24 m/s abnimmt. Der am Lenkrad erforderliche Winkel nimmt daher mit der Fahrgeschwindigkeit ab. Bild 3-46 zeigt die von BMW gewählte Auslegung, bei der der erforderliche Lenkradwinkel bis 130 km/h kleiner, darüber größer ist.
132 |
3 Lenken – Fahrzeugführung quer |
3.4 Einfluss der Luftkräfte
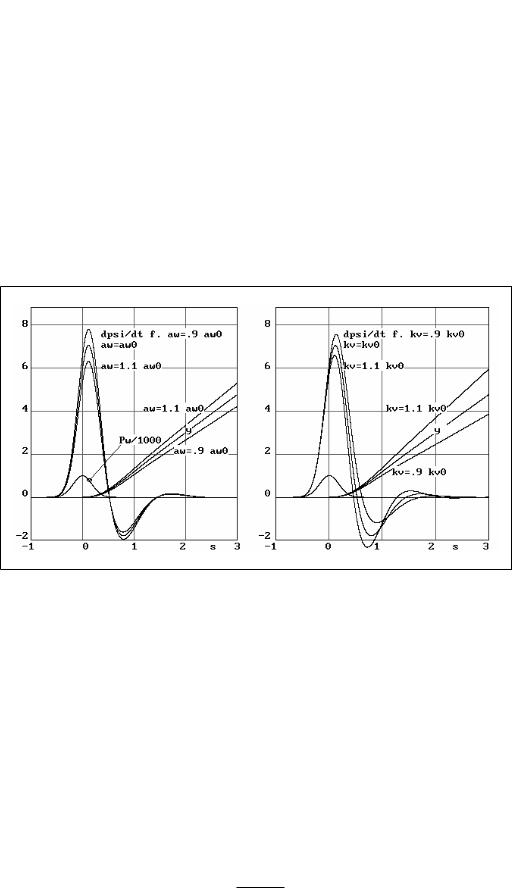
Die Wirkung einer Seitenwindböe ist eine allgemein bekannte, wenig geschätzte Folge einer Luftbewegung, die das Auto auf einer Brücke, nach einem Tunnel oder auf einer Lichtung treffen kann. Bild 3-47 zeigt die Wirkung einer solchen Störung, die maximal 1000 N erreicht und langsam anschwellend und abfallend (nach einer Glockenkurve) etwa 1 s dauert. Variiert ist dabei der Angriffspunkt (an der Vorderachse, 1.3 m vor dem Schwerpunkt, oder +/– 10 % davon entfernt), links und der Seitenkraftbeiwert vorn kv = 60 kN/rad +/– 10 %, rechts. Über der Zeit sind Gierwinkelgeschwindigkeit und Spurabweichung aufgetragen. Überraschend ist vielleicht, dass die Variation von kv den größeren Einfluss hat und dass der kleinere kv-Wert zur kleineren Spurabweichung führt.
Bild 3-47 Einfluss einer Seitenwindböe Pw, die aw vor dem Schwerpunkt angreift (Glockenkurve von etwa 1 s Dauer) auf Gierwinkelgeschwindigkeit dpsi/dt und Spurabkommen y.
Links |
ist der Angriffspunkt der Seitenwindkraft aw und |
Rechts |
der Seitenkraftbeiwert vorn kv um +/– 10 % variiert. |
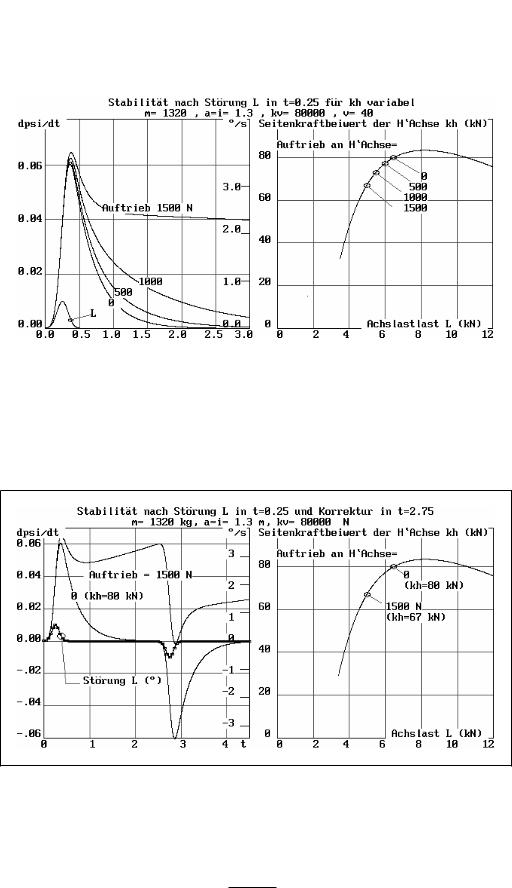
Einen oft unterschätzten Einfluss auf das Fahrverhalten hat der auf die Hinterachse wirkende Anteil des Auftriebs: er verringert dort die Seitenführungskraft und verschlechtert damit die Stabilität. Nach einer Störung kehrt das Fahrzeug nur verzögert in den Geradeauslauf zurück, Bild 3-48. Treten zwei Störungen auf, wie z. B. beim Überholen eines Lastzuges bei Seitenwind, dann treten Verhältnisse auf, die für den Fahrer verwirrend und daher beängstigend sind, Bild 3-49.
|
3.4 Einfluss der Luftkräfte |
133 |
|
|
|
|
|
|
Bild 3-48 Bei windschlüpfig gestalteten Bauformen liegt über der hinteren Fahrzeughälfte ein Gebiet mit hohem Unterdruck, das die Hinterachse entlastet. Die damit kleiner werdende Seitenführungskraft an der Hinterachse (rechts) führt zu einem langsamen Ausklingen einer Störung L (links), die für den Fahrer irritierend ist. Abhilfe schaffen Spoiler am Fahrzeugende, die vor sich einen Überdruck aufbauen. Günstige Luftwiderstandsbeiwerte müssen immer gleichzeitig mit dem Heckauftriebsbeiwert gesehen werden.
Bild 3-49 Der hier angenommene Heckauftrieb führt zu unbefriedigenden Reaktionen nach zweimaliger Störung.