

Mensch und Fahrzeug
.pdf94 |
2 Fahrzeugführung längs |
Bild 2-57 Überschussleistung P – Pw (kW) mit Fahrwiderstand FW = 132 + 0.6 v2/1.6
Welchen Marktanteil die verschiedenen Hybridantriebe gewinnen werden, ist noch kaum zu übersehen. Der Mild Hybrid (riemengetriebener Starter-Generator (RSG) 2.4, z. B. 5 kW) kann Bremsenergie nutzen und kurzzeitig Mehrleistung bieten. Der Vollhybrid (integrierter StarterGenerator (ISG) 2.3, z. B. 25 kW) kann mehr Fahrspaß vermitteln, schaltungsärmer gefahren werden, jedoch auf ein Getriebe nicht verzichten (Bild 2-57), der Verzweigungshybrid bietet Fahrspaß durch stufenlosen Antrieb, allerdings zu hohen Mehrkosten. Eine Verbrauchseinsparung gegen ein Fahrzeug mit SNA ist kaum möglich.
Kleine Gesamtmasse und Widerstandsfläche, guter Gesamtwirkungsgrad durch intelligente Nutzung des Antriebs sind die drei Schlüsselelemente geringen Verbrauchs. Aus wirtschaftlichen Gründen rechnen sich
1.langer Gang (-15 % bei Straßenlast),
2.Start-Stop-Automatik (Motor läuft nur, wenn Leistung erforderlich):
wenn nur bei stillstehendem Fahrzeug -5 % im Stadtbetrieb, -15 % wenn auch während der Fahrt (intermittierendes Beschleunigen)),
3.Mild Hybrid zur Wiedergewinnung von Bremsleistung (-5 % im Stadtbetrieb).
Voll-Hybrid und Verzweigungshybrid können nur durch ihren Fahrkomfort punkten, der natürlich dazu führen kann, dass der Fahrer verbrauchssparende Maßnahmen akzeptiert, die er sonst ablehnen würde, z. B. einen langen Gang oder intermittierendes Beschleunigen.
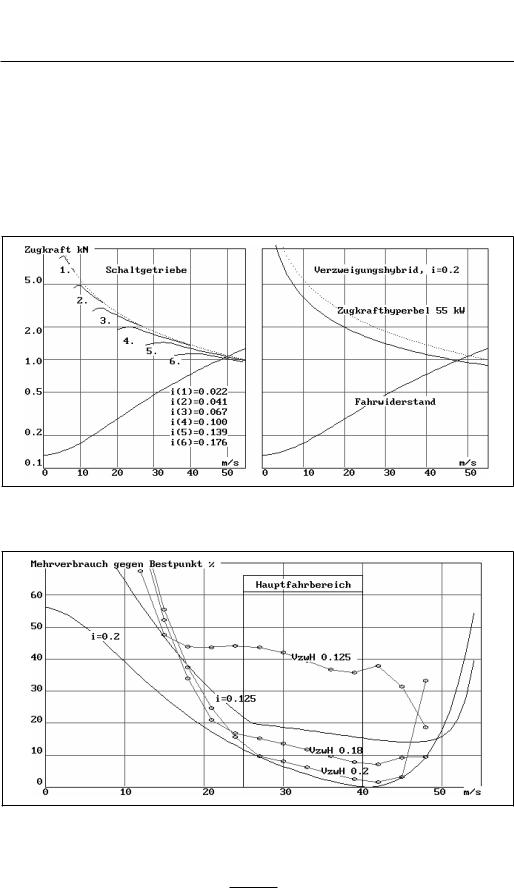
Die Bilder 2-56 und 2-57 stellen verschiedene Konzepte in Bezug Verbrauch und Fahrspaß (= Überschussleistung P – Pw) gegenüber. Das Konzept Pv = 55 kW, I = 0.15 m/rad entspricht einer gängigen Auslegung: I = 0.15 ist ein langer, aber nicht zu langer Gang, der sparsam ist und wegen der günstigen Motorkennung von den Fahrern gerade noch akzeptiert wird. Der kleinere Motor Pv = 33 kW bringt bei der gleichen Übersetzung nur eine geringe Einsparung, aber einen beträchtlichen Verlust an Überschussleistung. Versucht man diese durch eine kürzere Übersetzung (z. B. I = 0.105) zu bekommen, dann verschlechtert sich der Verbrauch besonders bei höheren Geschwindigkeiten, ohne dass dort das Ziel Leistungsüberschuss wirklich erreicht wird. Ein Serienhybrid mit einer elektrischen Leistung von 27.5 kW ermöglicht mini-
2.7 Verbrauchsverbesserung |
95 |
malen Verbrauch und großen Leistungsüberschuss (ο siehe auch Bild 2-55). Bei dieser Rechnung blieb allerdings die unvermeidlich größere Masse des Hybridantriebs unberücksichtigt. Je nach Größe des elektrischen Energiespeichers steht die Überschussleistung auch nur vorübergehend zur Verfügung. Hier muss noch ein Kompromiss zwischen zusätzlicher Masse und Energiereserve gefunden werden.
Der Verbrauch eines Verzweigungshybriden ist bei Volllast durch den Wirkungsgrad der Kraftübertragung benachteiligt, Bild 2-58, bei Straßenlast und nicht zu kleinen Geschwindigkeiten liegt er im Bereich der infrage kommenden Übersetzungen, Bild 2-59.
Bild 2-58 Zugkraft-/Geschwindigkeitsdiagramm für einen 55 kW Verbrennungsmotor mit 6-Gang Getriebe (links) sowie einen Verzweigungshybriden mit der Gesamtübersetzung i = 0.2.
Bild 2-59 Mehrverbrauch gegen den Bestpunkt verschiedener Konzepte

96 |
2 Fahrzeugführung längs |
Toyota biete mit steigendem Erfolg mit der Systembezeichnung Hybrid Synergy Drive (HSD) einen Verzweigungshybrid im Prius an. Die Spannung der Fahrbatterie ist 500 V, weil sich damit bessere Wirkungsgrade für EM1 und EM2 ergeben. Ein Gleichspannungswandler liefert 12 V für die normale Batterie. In diesem Fall wird eine Nickel-Metall-Hydrid-(NiMH)-Batterie eingesetzt (39 kg). VM ist ein 1.5 l Benzinmotor (57 kW), die elektrischen Maschinen sind Synchronmaschinen mit 10000 U/min. Es werden bipolare Leistungstransistoren (IGBT = Insulated Gate Bipolar Transistors) verwendet. Der Fahrer steuert die Längsbewegung des Fahrzeugs über Gaspedal und Bremse, die Regelung sucht den besten Gesamtwirkungsgrad, bzw. einen befriedigenden Ladezustand der Batterie. Die Höchstgeschwindigkeit beträgt 170 km/h, die Beschleunigungszeit von 0 auf 100 km/h 11 s. Als Normalverbrauch werden 6– 7 l/100 km genannt. Es kann auch rein elektrisch gefahren werden. Die Batterie reicht für 2.5 km.
Honda´s Civic 1.3 IMA ist ein Voll-Hybrid mit 6,5 kW Nm elektrischer Leistung (62 Nm). Die Nickel/Metall-Batterie wiegt 26 kg und hat ein Energiespeichervermögen von 7 kWh. Immerhin wird das Drehmoment des Verbrennungsmotors von 119 Nm um 52 % erhöht (mit Überlast?).
Literatur
>2.1 Hucho, W. H.: Aerodynamik des Automobils, Vieweg, 2005
>2.2 Fiala, E.: Was nach dem Auto kommt, Eurotax, 1994, S. 146
>2.3 Köhle, S.: Der Volkswagen Bora Hybrid, Gesamtzentrum für Verkehr, Braunschweig 2/2004
>2.4 Knorr, R., Deiml, M., Lugert, G.: Starter Generator zeigt „Biss“, Gesamtzentrum für Verkehr, Braunschweig 2/2004
>2.5 -- Helium als Arbeitsmedium, VDI-N 31.7. 1968, S.12
[2.6] Hucho, W. H.: Aerodynamik der stumpfen Körper, Vieweg, 2002
97
3 Lenken – Fahrzeugführung quer
Das Führen eines Fahrzeugs scheint uns eine ganz einfache Sache zu sein, die offenbar schon von Kindheit an den Menschen Freude macht. Aber es war aber ein langer Weg zum fahrstabilen Kraftfahrzeug.
Solange der Wagen von Zugtieren gezogen wurde, war das Lenken kein Problem: er folgte den Ziehenden, gezerrt oder vom Lenkschemel über die lange Deichsel gelenkt. Erst wenn der Fahrer selbst lenken muss, spürt er die Momente um die Lenkachse, die durch unterschiedliche Rollwiderstände an den Rädern hervorgerufen werden. Deshalb sind viele dem Beispiel Stephan Fafflers gefolgt, der 1680 ein Dreirad als Behindertenfahrstuhl gebaut hat, >I-2 . Das eine, gelenkte Vorderrad hat viel kleinere Störmomente. Auch die großen und schweren Dampffahrzeuge hatten meist ein gelenktes Vorderrad >I-5 .
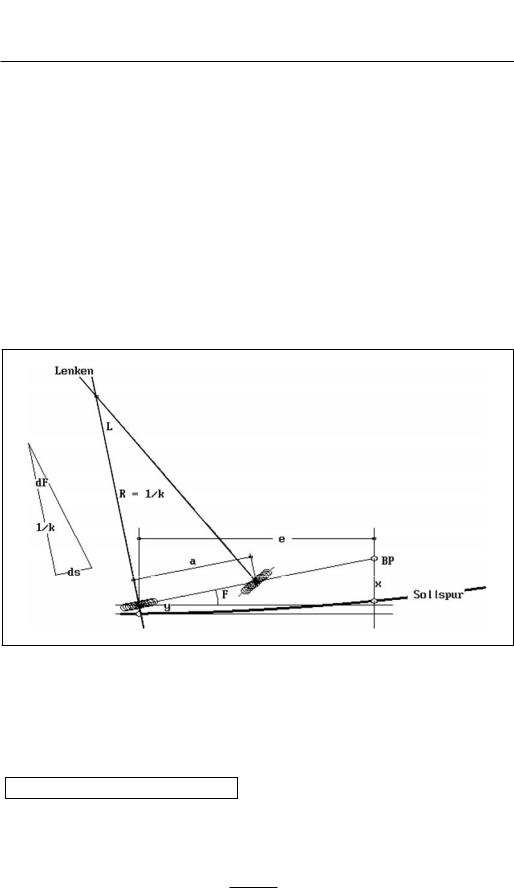
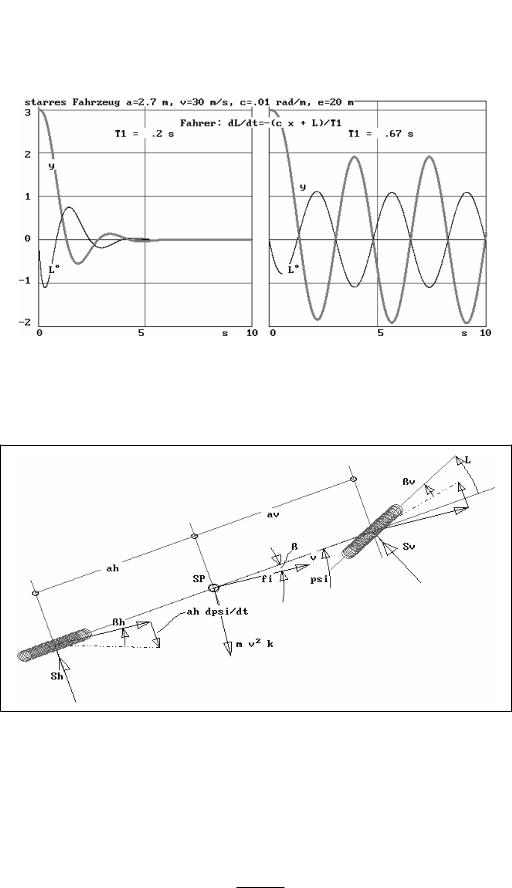
Bild 3-1 Modell zur Fahrzeugführung.
(L << 1) L = a/R = a · k, dF = k · ds, dy = F · ds, L = –c (y + e · F) mit L Lenkwinkel, F Richtungswinkel, y Spurabweichung, Fahrer
¢ |
¨¨ |
k ¸ds |
2 |
e |
¨ |
¯ |
|
± |
|||||
a¸k c¡ |
|
|
|
k ¸ds° |
d2k / ds2 c¸e/ a¸dk / ds c/ a¸k, mit ds / dt v d2k / dt2 c¸e¸v/ a¸dk / dt c¸v2 / a¸k 0
w0 v¸SQR(c/ a), D e/2¸v¸SQR(c/ a)
(z.B.:c .026(1.5n/ m), a 2.6, v 20: w0 4 0.3 Hz, D e/40)
98 |
3 Lenken – Fahrzeugführung quer |
Der Lenkwinkel L des starren Fahrzeugs bewirkt die Krümmung k = 1/R = L/a (a = Radstand) der Fahrspur. Zum Zeitpunkt t = 0 befindet sich das Hinterrad um y neben der Sollspur und die Fahrzeuglängsachse schließt mit der Sollspur den Winkel F ein. Der Fahrer blickt um die Vorschaustrecke e voraus auf den Blickpunkt BP. Dessen Abstand von der Sollspur x verwendet er als Regelgröße: L = –c · x (c = Verstärkung).
3.1 Lenken
Der Fahrer führt sein Fahrzeug in erster Linie nach optischer Information. Er erkennt die Position seines Fahrzeuges auf der Straße nach Seite und Richtung und kann den Krümmungsverlauf der Straße abschätzen. Im einfachsten Fall (Bild 3-1a) sitzt der Fahrer auf dem Hinterrad des Einspurmodells und blickt nach vorn auf die Straße, auf den Blickpunkt BP. Er richtet sein Lenkverhalten danach, wie weit dieser Blickpunkt von der erwünschten Sollspur entfernt ist (x) und lenkt proportional zu diesem Abstand:
L = – c · x.
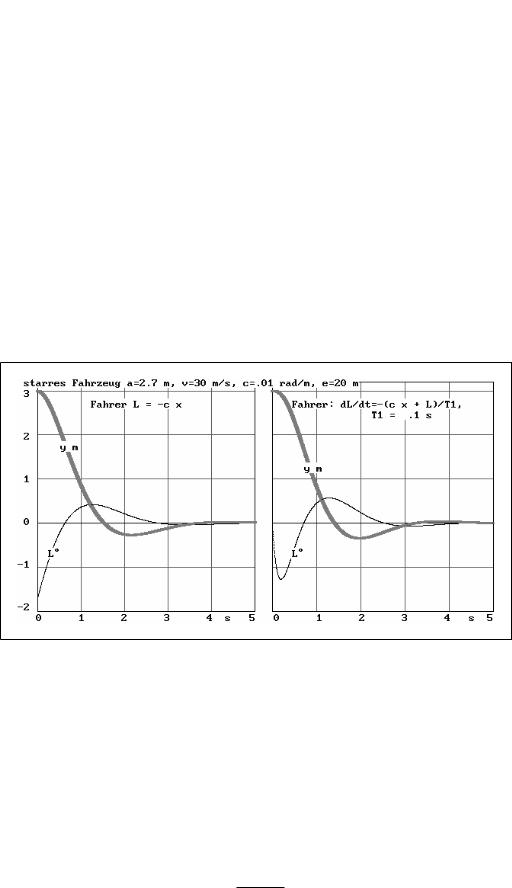
Bild 3-2 Spurwechsel um y = 3 m, Fahrzeug ohne Verzug
Links: Fahrer ohne Verzug (T1 = 0)
Rechts: T1 = 0.1s.
(Alles kleine Winkel: sin(L) = L, cos(L) = 1.) Das negative Vorzeichen bedeutet, dass er nach rechts lenkt, wenn er von der Sollspur nach links abgekommen ist und umgekehrt. Fahrer und Modell reagieren ohne Zeitverzug: L = –c · x und k = L/a: der Lenkwinkel L ist proportional der Spurabweichung x, die Krümmung k der gefahrenen Spur ist proportional dem Lenkwinkel L. Daraus folgt die angegebene Differentialgleichung 2. Ordnung mit der Kennfrequenz w0 = v · SQR(c/a) und dem Dämpfungsmaß D = e/2 SQR(c/a) = e · w0/(2 v). Die Kennfre-
3.1 Lenken |
99 |
quenz des Systems steigt mit der Fahrgeschwindigkeit, die Dämpfung steigt mit der Vorausschaustrecke e, nimmt aber mit der Fahrgeschwindigkeit ab. Bild 3-2 zeigt das Verhalten unter der Annahme, dass die Sollspur gerade ist und das Fahrzeug zur Zeit t = 0 davon einen Abstand von y hat. Reagieren Fahrer und Fahrzeug ohne Verzug, dann springt der Lenkwinkel in t = 0 und bringt das Fahrzeug rasch auf den Sollkurs. Reagiert der Fahrer mit der Verzugszeit T1, dann steigt der Lenkwinkel mit endlicher Lenkwinkelgeschwindigkeit an (Bild 3-2 rechts). Der Spurwechsel ist etwas schneller, aber schwächer gedämpft.
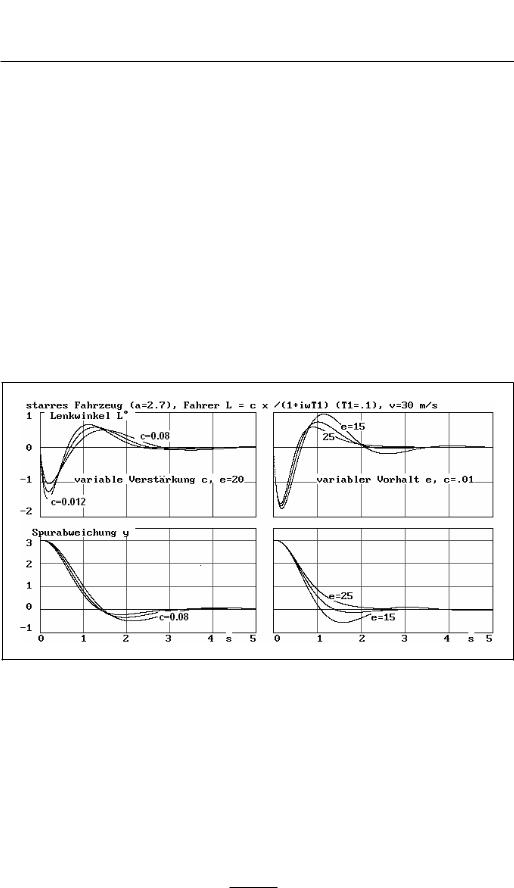
In Bild 3-3 ist die Verstärkung c und die Vorschaustrecke e variiert (c = 0.01 +/– 0.002 rad/m, e = 20 +/–5 m). Je größer die Verstärkung c, umso schneller ist der Spurwechsel. Je größer die Vorschaustrecke, umso stärker die Dämpfung. Die Mittelwerte c = 0.01 und e = 20 stellen für die Fahrgeschwindigkeit v = 30 m/s = 108 km/h den in der Praxis wahrscheinlichen Wert dar.
In Bild 3-4 ist die Verzugszeit des Fahrers T1 vergrößert: bei der Verdopplung von 0.1 auf 0.2 s (ο vgl. Bild 3-2) verschlechtert sich die Dämpfung, der Einschwingvorgang ist nach 6 s, statt nach 5 s beendet. Bei einem Zeitverzug von T1 = 0.67 s klingt die Schwingung nicht mehr ab: der Fahrer fährt „Schlangenlinie“. Die größere Verzugszeit kann auf Drogengenuss (Alkohol), auf Übermüdung, Schläfrigkeit oder anderes zurückzuführen sein.
Bild 3-3 Wie Bild 3-2, Fahrer mit Verzug T1 = 0.1 s
Links: |
Variation der Verstärkung c = 0.01 +/-0.0 s |
Rechts: |
Vorschaustrecke e = 20 +/-5 m |
100 |
3 Lenken – Fahrzeugführung quer |
|
|
|
|
|
|
|
Bild 3-4 Wie Bild 3-2, Fahrer mit Verzug
Links: T1 = 00.2 s und
Rechts: T1 = 0.67 s
Bild 3-5 Einspurmodell nach >3.14 . Die Seitenkraftbeiwerte kv und kh repräsentieren die Eigenschaften der Achse.
Fahrdynamik am Einspurmodell: die Eigenschaften der Räder repräsentieren die der Achse
M · v2 · k = Sv + Sh,
m · i2 · d2psi/dt2 = Sv · av – Sh · ah bv = L + b – av · dpsi/dt,
bh = b + ah · dpsi/dt

3.2 Reales Fahrzeug, Fahrdynamik |
101 |
3.2 Reales Fahrzeug, Fahrdynamik
In Wirklichkeit hat auch das Fahrzeug infolge seiner Masse und seines Trägheitsmoments um die Hochachse ein Zeitverhalten. Rieckert und Schunck >3.14 haben 1940 den ersten fahrdynamischen Ansatz geliefert, Bild 3-5. Im einfachsten Fall genügen zwei Gleichungen:
•das Gleichsetzen der Kräfte quer zur Fahrtrichtung fi
•und der Momente um die Hochachse mit dem Trägheitsmoment m · i2 mal der Gierwinkelbeschleunigung d2psi/dt2.
Infolge der Drehung um die Hochachse weichen die Schräglaufwinkel bv und bh vom Schwimmwinkel b = psi – fi ab. (Die Lösung der Differentialgleichung ist in Bild 3-17 angegeben. Sie gilt für den linearen Zusammenhang von Seitenkraft und Schräglaufwinkel, also etwa bis zu einer Querbeschleunigung v2 · k von etwa 4 m/s2 bei griffiger Straße. Für größere Querbeschleunigungen und dann nichtlinearen Zusammenhang ist eine geschlossene Lösung nicht möglich. Für den stationären Fall (Frequenz = 0) sind Gleichungen für Sv(bv), bzw. bv(Sv) in Bild 3-18 angegeben. Dabei spielen auch Umfangskräfte Uv eine Rolle. Für den stationären und linearen Bereich vereinfacht sich die Lösung auf die angegebenen Gleichungen für L und b.)
Natürlich ist es heute möglich dreidimensionale Modelle mit viele Freiheitsgraden und Nichtlinearitäten zu programmieren. Das ist auch wichtig, wenn besondere Probleme untersucht werden sollen. Für das grundsätzliche Verständnis der Fahrdynamik reicht aber diese Vereinfachung, bei der man den Durchblick behalten kann.
Der Veröffentlichung von Rieckert und Schunck ist anzumerken, wie wenig zufrieden sie mit ihrem Ergebnis waren. Eigentlich hätten nach ihrer Veröffentlichung alle damaligen Fahrzeuge instabil sein müssen, was sie aber nicht waren.
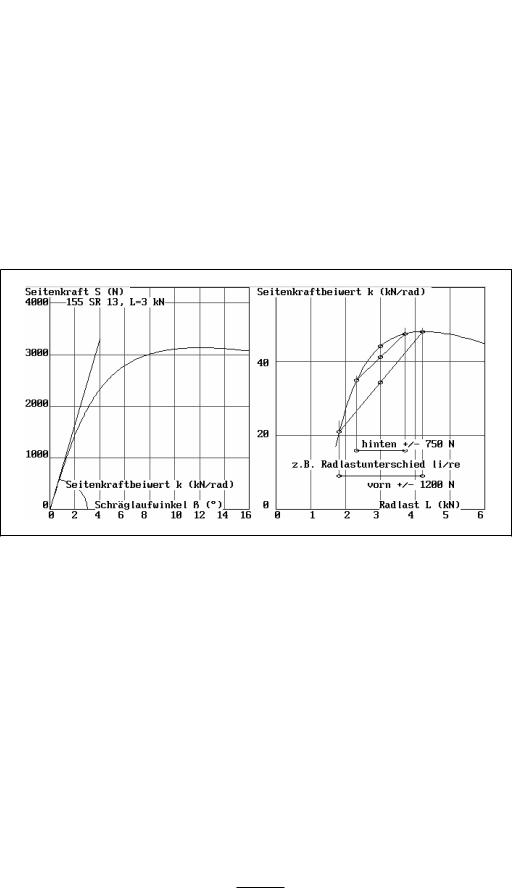
Bild 3-6 zeigt den Zusammenhang von Seitenkraft S und Schräglaufwinkel b. Rieckert und Schunck mussten annehmen, dass bei gleichen Reifen und daher gleichen Seitenkraftbeiwerten an Vorderund Hinterachse eine kritische Geschwindigkeit erreicht werden müsse. Sie haben daher empfohlen, ah/av groß zu machen, also vorderachslastige Fahrzeuge zu bauen oder hinten größere Reifen als vorn zu verwenden. Teils ist das geschehen durch das Nachvornerücken des Motor-Getriebe-Blocks, was durch die Einzelradaufhängung leichter möglich wurde. Die Folge war freilich die geringere Hinterachslast mit entsprechenden Anfahrschwierigkeiten bei glatter Straße. Auch größere Räder hinten als vorn hat es gegeben. Wegen häufiger Reifenpannen waren aber zwei Reserveräder die Regel. Sollte man nun zwei größere und zwei kleinere mitnehmen?
Die Hauptlinie der Entwicklung war aber einen anderen Weg gegangen: zur Einzelradaufhängung mit tiefliegendem Momentanzentrum vorn und hoch liegendem hinten und außerdem noch zum Heckantrieb. Diese Fahrzeuge hätten noch kritischer sein müssen. Und waren es wohl auch.
Die Lösung des Problems aber barg die Lenkelastizität für kleinere Querbeschleunigungen und der Drehstabstabilisator für größere. Bild 3-7 zeigt die Abstützung des Rollmoments MR (Moment um die Fahrzeuglängsachse). Es treten dabei Radlaständerungen vorn und hinten auf (dLv und dLh), die von der Lage der Momentanzentren MZv und Mzh und der Härte der wechselseitigen Federung abhängen. Diese Radlaständerungen bewirken die in Bild 3-6 gezeigten
102 |
3 Lenken – Fahrzeugführung quer |
Veränderungen der Seitenkraftbeiwerte vorn und hinten. Wie noch gezeigt wird, ist eine größere Seitenführungskraft an der Hinterachse erwünscht, also ein kleinerer Radlastunterschied hinten als vorn. Die in den 30er Jahren aufkommende Entwicklung der Einzelradaufhängung hatten den gegenteiligen Effekt: vorn musste das Momentanzentrum tief liegen, um keine Lenkungsunruhe aufkommen zu lassen. Hinten versuchte man es hoch zu legen, um die Kurvenneigung klein zu halten. Dazu kommt noch, dass die Federhärte hinten meist größer als vorn sein muss: die Laständerung durch zusätzliche Fahrgäste oder Reisegepäck erfolgt hauptsächlich an der Hinterachse. Es ist also zunächst das Gegenteil von dem eingetreten, was man bezüglich Fahrstabilität eigentlich wollte: die Seitenführungskraft der Achse hinten wurde kleiner als vorn.
Bild 3-6 Eine auf ein Rad wirkende Seitenkraft S bewirkt den Schräglaufwinkel b, der zunächst proportional zur Seitenkraft zunimmt, links. Überschreitet die Seitenkraft etwa die halbe Radlast, dann nimmt der Schräglaufwinkel b überproportional zu.
Der Proportionalitätsfaktor für kleine Schräglaufwinkel heißt Seitenkraftbeiwert k (N/rad). Er ist in der Nähe der Nennlast L des Reifens maximal. Wenn sich bei Kurvenfahrt die Radlast infolge des Rollmoments um die Fahrzeuglängsachse an kurvenäußeren Rad zu Lasten des Kurveninneren erhöht, verringert sich der Seitenkraftbeiwert der Achse, rechtes Bild.
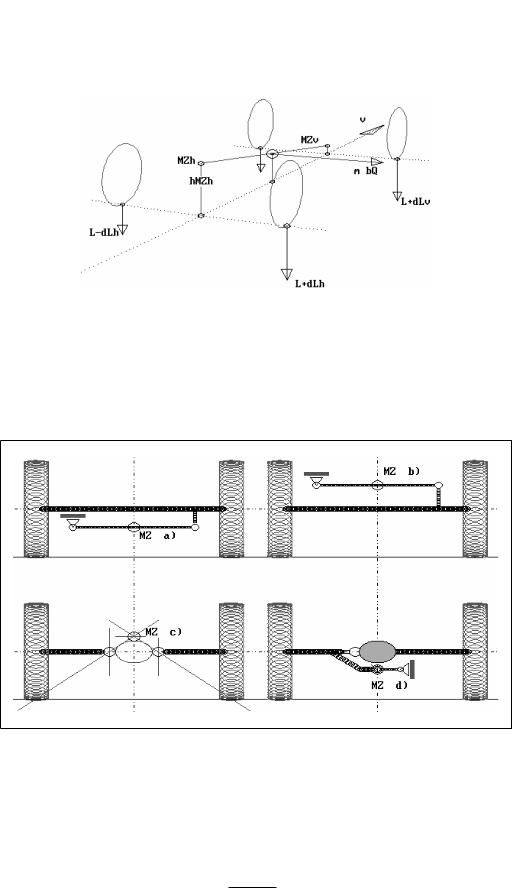
Die Bild 3-8 bis 3-10 zeigen Abhilfemaßnahmen: das Momentanzentrum hinten wurde durch hochliegende Querabstützung („Schwebeachse“) (Bild 3-8b) hoch gelegt. Durch das Tieferlegen der Querabstützung („Panhard-Stab“) (Bild 3-8a) konnte das Momentanzentrum abgesenkt werden. Den gleichen Weg ging die Zweigelenkpendelachse zur Eingelenkpendelachse (Bild 3-8c und d). An der Vorderachse kann das Momentanzentrum bei den üblichen Querlenkeroder McPherson-Achsen beliebig tief gelegt werden (Bild 3-9).
|
3.2 Reales Fahrzeug, Fahrdynamik |
103 |
|
|
|
|
|
|
Bild 3-7 Abstützung des Rollmoments: das Fahrzeug bewegt sich mit der Geschwindigkeit v (nach rechts oben). Infolge der Querbeschleunigung bQ entsteht das Rollmoment MR, das je nach Höhe der Momentanzentren hMZv und hMZh und Federsteifigkeit cv, bzw. ch an Vorderund Hinterachse abgestützt wird. Durch die Wahl der Höhe der Momentanzentren und der Federsteifigkeit für wechselseitiges Einfedern kann man das Verhältnis der Radlastdiffernz dL an Vorderund Hinterachse festlegen.
Bild 3-8 Lage der Momentanzentren an Starrund Pendelachsen. Den tiefliegenden Panhard-Stab ersetzen Längsfedern, den hochliegenden der „Schwebeachse“ eine hoch liegende Querblattfeder. Innenliegende Federn an der Starrachse verringern die wechselseitige Federrate im Verhältnis des Quadrates von Federund Radspur.