

1.2. Обобщенная структурная схема сау
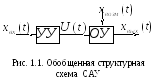
Система автоматического управления (рис 1.1) содержит: устройство управления (УУ) или регулятор, на вход которого подается задающее воздействие (входной сигнал или совокупность сигналов) хвх(t). Задающее воздействие определяет требуемый закон управления. В результате этого воздействия на выходе регулятора вырабатывает управляющее воздействие U(t), которое поступает на вход объекта управления (ОУ).
Под ОУ в данном курсе понимается любое техническое устройство (станок, самолет, турбина и т.д.), для функционирования которого необходимы специально организованные воздействия U(t). Качество управления оценивается по значению выходной величины объекта хвых(t) – это обычно главный технологический параметр (скорость, мощность, производительность и т.д.).
Наряду с хвх(t), внешним по отношению к рассматриваемой САУ явяляются возмущающее воздействие хвозм(t), которое, как и U(t), приложено к ОУ. К числу таких возмущений можно отнести момент сопротивления при металлообработке, колебание напряжения в сети, ветровую нагрузку и т.д. Возмущающие воздействия искажают требуемый закон управления. Очевидно, что в первом приближении задача синтеза САУ состоит в разработке такого УУ, с которым и при наличии существенных возмущающих воздействий отклонение требуемого закона управления ОУ от фактического не превышает допустимых значений.
1.2. Классификация сaу
Системы автоматического регулирования классифицируются по различным признакам.
1. По принципу построения, различают разомкнутые системы, системы с управлением по отклонению (с обратной связью) и системы с компенсацией возмущения.
В разомкнутых системах (см. рис. 1.1) управляющее воздействие U(t),
формируемое на выходе УУ, определяется только входным сигналом системы хвх(t) и не зависит от выходной величины объекта регулирования хвых(t). При наличии значительных возмущений или нестабильности параметров системы фактический закон изменения выходной величины может значительно отклоняться от заданного.
В соответствии с принципом управления по отклонению управляющее воздействие U(t) зависит от отклонения фактического закона изменения регулируемой величины от требуемого. Сигнал
х(t) = хвх(t) - хвых(t),
называемый ошибкой регулирования, формируется на элементе сравнения (ЭС). Информация о текущем значении регулируемой величины поступает в ЭС по каналу обратной связи (ОС). Наличие канала ОС делает структуру системы замкнутой (рис. 1.2.).

В общем случае ОС может быть не только отрицательной, но и положительной, при этом в ЭС входной и выходной сигналы системы складываются.
В системах с компенсацией возмущения
(рис. 1.3.)управляющее
воздействие U(t)
на выходе УУ зависит как от входного
сигнала системы хвх(t)
, так и от возмущающего воздействия
хвозм(t).
системах с компенсацией возмущения
(рис. 1.3.)управляющее
воздействие U(t)
на выходе УУ зависит как от входного
сигнала системы хвх(t)
, так и от возмущающего воздействия
хвозм(t).
2. По виду входного сигнала САУ делятся на: системы стабилизации, входной сигнал которых является постоянной величиной (например, системы автоматической стабилизации скорости резания при металлообработке или системы стабилизации напряжения); системы программного управления, в которых входной сигнал является известной, заранее заданной функцией времени (например, система управления станков с ЧПУ); следящие системы, в которых входной сигнал заранее не определен и зачастую случаен (например, радиолокационные системы автоматического сопровождения цели).
3. Существенным при математическом описании систем является их деление на линейные и нелинейные. Для линейных систем выполняется принцип суперпозиции, суть которого заключается в следующем: если на вход системы поступает управляющее воздействие, которое можно представить в виде суммы k простых воздействий
![]() ,
,
то
реакция системы (ее выходной сигнал)
равна сумме реакций на каждое слагаемое
хвхi(t),
![]() При этом значениеk
и
форма хвхi(t)
могут
быть любыми.
При этом значениеk
и
форма хвхi(t)
могут
быть любыми.
Все реальные системы в технике и в природе, как правило, являются в большей или в меньшей степени нелинейными. Системы, нелинейность которых проявляется незначительно, можно, с приемлемой для практики точностью, описывать как линейные, используя более простые линеаризованные характеристики и уравнения. Очевидно, что для существенно нелинейных систем использование линеаризованных моделей недопустимо, и такие системы должны рассматриваться отдельно.
4. Различают стационарные и нестационарные САУ. Параметры стационарных систем неизменны, а у нестационарных параметры являются функциями времени или сигналов системы.
5. По виду зависимости регулируемой величины от внешнего воздействия различают статические и астатические САУ. В последних, после завершения переходного процесса, вызванного внешним воздействием, значение регулируемой величины устанавливается равным заданному, т.е. в установившемся режиме ошибка регулирования равна нулю. В статических САУ регулируемая величина по окончании переходного процесса принимает значение, пропорциональное внешнему воздействию, при этом установившееся значение ошибки регулирования отлично от нуля.
6. Система относится к непрерывным, если все сигналы в ней являются непрерывными функциями времени. В дискретных САУ имеет место дискретный способ передачи и преобразования сигналов. Важнейшим классом дискретных систем являются цифровые системы, в структуру которых входят цифровые вычислительные устройства (контроллеры, микропроцессоры и т.п.).
7. В адаптивных САУ управляющее устройство позволяет обеспечить изменение алгоритмов управления и параметров системы (например, коэффициентов усиления звеньев), в результате чего достигается высокое качество работы системы.