

4.3. Корневые критерии качества
Эта группа критериев позволяет оценить качество переходных процессов по расположении полюсов и нулей передаточной функции устойчивой замкнутой системы. При исследовании устойчивости САУ оценивалось только расположение полюсов на комплексной плоскости. Оценивая качество переходного процесса, необходимо учитывать и расположение нулей.
К числу корневых критериев качества относят степень устойчивости и степень колебательности.
Степень устойчивости (η) – это расстояние от мнимой оси до ближайшего к ней левого полюса (рис. 4.3, а) или ближайшей пары комплексно сопряженных полюсов замкнутой системы (рис. 4.3, б). В первом случае соответствующая этому полюсу слагаемое в общем решении дифференциального уравнения (3.5) равно:
![]() .
.
В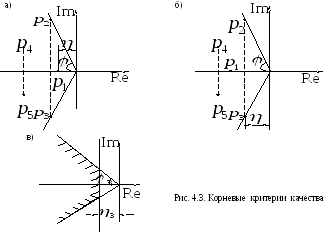 о
втором случае, когда ближайшей к мнимой
оси окажется пара комплексно-сопряженных
полюсов, им в выражении (3.5) будет
соответствовать слагаемое вида:
о
втором случае, когда ближайшей к мнимой
оси окажется пара комплексно-сопряженных
полюсов, им в выражении (3.5) будет
соответствовать слагаемое вида:
![]() .
.
В обоих случаях указанное слагаемое будет затухать медленнее остальных, тем самым определяя в первом приближении длительность переходного процесса:
![]() .
.
Степень колебательности определяется только для замкнутых систем, передаточные функции имеют комплексно-сопряженные полюса:
pi,i+1 = αi + jβi .
Переходная функция таких систем в большей или меньшей степени колебательна. Степень колебательности переходного процесса равна:
![]() ,
,
где φ – наибольший по величине угол, образованный отрицательной вещественной полуосью и лучом, проведенным из начала координат к комплексному полюсу pi (рис. 4.3, а, б). Среди всех комплексно-сопряженных полюсов системы указанному полюсу соответствует максимальное отношение мнимой части к действительной. Чем больше степень колебательности μ, тем слабее будет затухание колебаний в переходном процессе.
Задавшись предельно допустимыми значениями степени устойчивости ηз и степени колебательности φз, можно построить на комплексной плоскости область (рис. 4.3, в), в которой должны находиться полюса системы, показатели качества регулирования которой будут удовлетворять заданным значениям, т.е. η > ηз и μ < μз.
4.4. Интегральные критерии качества
Интегральными критериями (оценками) качестваназываются такие, которые одним числом (интегрально) оценивают качество переходного процесса в системе. Кроме того, такие оценки обычно являются интегральными функционалами и выражаются в следующем виде:
![]()
где
F![]() – заданная функция, определяющая тип
интегрального критерия;x(t)
– отклонение переходной функции
системы от значенияh(∞),
которое установится после окончания
переходного процесса, т.е.
– заданная функция, определяющая тип
интегрального критерия;x(t)
– отклонение переходной функции
системы от значенияh(∞),
которое установится после окончания
переходного процесса, т.е.
x(t) = h(∞) – h(t). (4.2)
К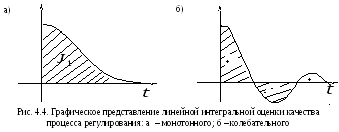 ак
известно, качество переходного процесса
в САУ оценивается совокупностью
показателей. Зачастую при изменении
параметров системы с целью обеспечения
требуемых характеристик переходного
процесса одни из показателей улучшаются,
в то время как другие ухудшаются. В
такой ситуации, когда задача выбора
оптимальных значений параметров системы
оказывается многокритериальной, а
потому трудноразрешимой, использование
интегральных критериев, оценивающих
качество регулирования одним числом,
оказывается предпочтительным.
ак
известно, качество переходного процесса
в САУ оценивается совокупностью
показателей. Зачастую при изменении
параметров системы с целью обеспечения
требуемых характеристик переходного
процесса одни из показателей улучшаются,
в то время как другие ухудшаются. В
такой ситуации, когда задача выбора
оптимальных значений параметров системы
оказывается многокритериальной, а
потому трудноразрешимой, использование
интегральных критериев, оценивающих
качество регулирования одним числом,
оказывается предпочтительным.
Для монотонного процесса (рис. 4.4, а) интегральной оценкой может служить функционал следующего вида:
![]()
называемый линейной интегральной оценкой качества J1. Ее численное значение равно площади под кривой переходного процесса. Очевидно, что динамика системы тем лучше, чем меньше значение J1.
Для обеспечения требуемых динамических свойств САУ необходимо выразить величину J1 через коэффициенты передаточной функции системы, а затем найти оптимальные значения варьируемых параметров, соответствующих минимуму J1.
Поскольку
 ,
,
и учитывая, что
![]()
=
![]()
![]() ,
,
(где
![]() - передаточная функция замкнутой
системы), получаем выражение для расчета
величины линейной интегральной оценкой
качестваJ1
по
передаточной функции системы:
- передаточная функция замкнутой
системы), получаем выражение для расчета
величины линейной интегральной оценкой
качестваJ1
по
передаточной функции системы:
![]() .
(4.3)
.
(4.3)
Так, например, для системы с передаточной функцией
![]()
интегральная оценка J1 , согласно выражению (4.3), равна:
 .
.
Для системы с передаточной функцией
![]()
интегральная оценка
зависит
от соотношения постоянных времени
![]() и
и![]() .
.
Использование линейной интегральной оценки J1возможно только для монотонных процессов и неприемлемо для оценки качества колебательных систем. Для колебательных процессов величина критерия, равная разности между суммой положительных и отрицательных площадей (см. рис. 4.4, б), не будет однозначно связана с действительным качеством регулирования системы.
Например, ухудшение качества переходного процесса при переходе к незатухающим колебаниям будет сопровождаться уменьшение критерия J1 до нуля. В связи с этим при наличии перерегулирования в переходном процессе и колебательном его характере применяют квадратичную интегральную оценку качества J2 следующего вида:
![]() .
.
Величина квадратичной интегральной оценки J2 равна площади, ограниченной кривой x2(t) (рис. 4.5, а).
В справочной литературе приведены формулы, выражающие величину критерия J2 непосредственно через коэффициенты дифференциального уравнения замкнутой системы.
Д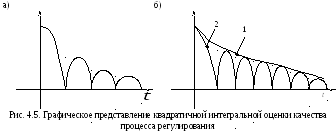 анный
критерий является наиболее широко
используемым интегральным критерием
качества, однако в ряде случаев он также
не дает достоверной оценки характера
переходного процесса. На рис. 4.5, б
приведены графикиx2(t)
для монотонного процесса (кривая 1) и
колебательного процесса (кривая 2).
Очевидно, что значение критерия J2
для колебательного
процесса будет меньше, в то время как
более предпочтительным является
монотонный процесс: ему соответствует
плавное изменение выходного сигналы и
отсутствие значительных динамических
воздействий в системе.
анный
критерий является наиболее широко
используемым интегральным критерием
качества, однако в ряде случаев он также
не дает достоверной оценки характера
переходного процесса. На рис. 4.5, б
приведены графикиx2(t)
для монотонного процесса (кривая 1) и
колебательного процесса (кривая 2).
Очевидно, что значение критерия J2
для колебательного
процесса будет меньше, в то время как
более предпочтительным является
монотонный процесс: ему соответствует
плавное изменение выходного сигналы и
отсутствие значительных динамических
воздействий в системе.
Недостатки рассмотренных интегральных оценок качества обусловили использование обобщенного (улучшенного) интегрального критерия, имеющего в простейшем случае следующий вид:
![]() .
.
Использование
интегральной оценки J3
позволяет обеспечить в системе быстро
затухающий, но достаточно плавный
процесс, поскольку наличие в подынтегральном
выражении слагаемого
![]() ограничивает
скорость изменения регулируемой
величины, снижая колебательность
системы. Чем
больше коэффициент
ограничивает
скорость изменения регулируемой
величины, снижая колебательность
системы. Чем
больше коэффициент
![]() ,
тем значительнее влияние указанного
слагаемого, тем более плавным будет
переходный процесс, но зато и более
длительным.
,
тем значительнее влияние указанного
слагаемого, тем более плавным будет
переходный процесс, но зато и более
длительным.
В качестве интегральных критериев используются и функционалы более общего вида. Иногда в выражении интегральной оценки вводится время t в явном виде.
Наиболее широко интегральные критерии применяются в теории оптимальных систем автоматического управления.