

2.6. Эквивалентные преобразования структурных схем линейных сау
В САУ встречаются три вида соединений звеньев: последовательное, параллельное и соединение звеньев по схеме с обратной связью.
В системе, состоящей из n последовательно соединенных звеньев (рис. 2.28) выходной сигнал предыдущего звена равен входному сигналу последующего.
И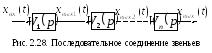 зображения
по Лапласу выходных сигналов этих
звеньев равны:
зображения
по Лапласу выходных сигналов этих
звеньев равны:
xвых1(p) = W1(p)xвх(p); xвых2(p) = W2(p) xвых1(p); … xвых(p) = Wn(p)xвых(n)(p).
Откуда
xвых![]() xвх(p).
xвх(p).
Следовательно, передаточная функция системы примет вид:
![]() .
(2.57)
.
(2.57)
Таким образом, передаточная функция последовательно соединенных звеньев равна произведению передаточных функций этих звеньев.
Частотные характеристики последовательно соединенных звеньев:
![]()
где
A(ω)
= A1(ω)A2(ω)…An(ω);
![]() .
.
Логарифмическая амплитудно-частотная характеристика звеньев, соединенных последовательно:
![]()
![]() .(2.58)
.(2.58)
Следовательно, логарифмические амплитудно- и фазо-частотная характеристики системы, состоящей из последовательно соединенных звеньев, равны сумме ЛАХ и ФЧХ отдельных звеньев. Это существенно упрощает построение логарифмических частотных характеристик, по сравнению с обычными характеристиками.
Передаточная функция минимально-фазовой системы в общем случае может быть записана в виде:
 .
(2.59)
.
(2.59)
В
выражении (2.59) сомножители в числителе
![]() определяют
нули передаточной функции, а именно:
определяют
нули передаточной функции, а именно:
сомножитель
 соответствует
нулевому нолю кратности
соответствует
нулевому нолю кратности ,
,сомножитель
 – действительному нолю
– действительному нолю кратностиl,
кратностиl,
сомножитель
 – паре комплексно-сопряженных нолей
кратности
– паре комплексно-сопряженных нолей
кратности
 .
.
Аналогичные
сомножители в знаменателе выражения
(2.59)
![]() определяют полюса передаточной функции,
а именно:
определяют полюса передаточной функции,
а именно:
сомножитель
 соответствует
нулевому полюсу кратности
соответствует
нулевому полюсу кратности ,
,сомножитель
 – действительному полюсу
– действительному полюсу кратности
кратности ,
,сомножитель
 – паре комплексно-сопряженных полюсов
кратности
– паре комплексно-сопряженных полюсов
кратности
 .
.
Очевидно,
что в зависимости от соотношения s
и
![]() передаточная функция (2.59) может иметь
только один тип особенностей: либо
нулевые ноли, либо нулевые полюса. Кроме
того, предполагается, что в (2.59) для
коэффициентов демпфирования выполняются
неравенства: 0 <ζ
< 1.
передаточная функция (2.59) может иметь
только один тип особенностей: либо
нулевые ноли, либо нулевые полюса. Кроме
того, предполагается, что в (2.59) для
коэффициентов демпфирования выполняются
неравенства: 0 <ζ
< 1.
Формально
передаточная функция (2.59) представляет
собой произведение нескольких
сомножителей, что соответствует
последовательному соединению звеньев,
и для вычисления
![]() можно
воспользоваться выражением (2.58). При
этом построение ЛАХ системы осуществляется
без предварительного построения ЛАХ
отдельных звеньев по следующим правилам.
можно
воспользоваться выражением (2.58). При
этом построение ЛАХ системы осуществляется
без предварительного построения ЛАХ
отдельных звеньев по следующим правилам.
На
оси частот в порядке возрастания
указываются все частоты сопряжения
![]() ЛАХ, определяемые соответствующими
постоянными времени:
ЛАХ, определяемые соответствующими
постоянными времени:![]() =
1/
=
1/![]() .
.
Построение
ЛАХ начинается на частотах, меньших
самой малой частоты сопряжения
![]() .
.
Если
при этом в выражении (2.59) выполняется
равенство s
=
![]() =
0 (система не имеет нулевых полюсов и
нолей), то первая низкочастотная асимптота
ЛАХ проводится параллельно оси частот
на уровне 20lgk
до частоты
=
0 (система не имеет нулевых полюсов и
нолей), то первая низкочастотная асимптота
ЛАХ проводится параллельно оси частот
на уровне 20lgk
до частоты
![]()
Если
в выражении (2.59) s
![]() , а
, а![]() =
0, то уравнение низкочастотной асимптоты:
=
0, то уравнение низкочастотной асимптоты:
![]() ,
(2.60)
,
(2.60)
т.е.
ЛАХ до наименьшей частоты сопряжения
![]() проводится
с наклоном (+20∙s)
дБ/дек.
проводится
с наклоном (+20∙s)
дБ/дек.
Если
в выражении (2.48) s
=![]() ,
а
,
а![]() ,
то уравнение низкочастотной асимптоты:
,
то уравнение низкочастотной асимптоты:
![]() ,
(2.61)
,
(2.61)
и
наклон ЛАХ до наименьшей частоты
сопряжения
![]() равен -20∙
равен -20∙![]() дБ/дек.
дБ/дек.
Для
построения низкочастотной асимптоты
ЛАХ необходимо для произвольной частоты
![]() меньшей или равной
меньшей или равной![]() по выражениям (2.60) или (2.61) рассчитать
величину
по выражениям (2.60) или (2.61) рассчитать
величину![]() и через точку с координатами (
и через точку с координатами (![]() ;
;![]() )
провести ЛАХ с необходимым наклоном.
)
провести ЛАХ с необходимым наклоном.
На
частоте
![]() производится излом ЛАХ с изменением ее
наклона, величина которого определяется
видом сомножителя в выражении (2.59),
которому соответствует сопрягающая
частота
производится излом ЛАХ с изменением ее
наклона, величина которого определяется
видом сомножителя в выражении (2.59),
которому соответствует сопрягающая
частота![]() .
Наклон ЛАХ на частоте
.
Наклон ЛАХ на частоте![]() изменяется по отношению к предыдущему
наклону на +20∙l,
если
изменяется по отношению к предыдущему
наклону на +20∙l,
если
![]() соответствует постоянной времениT
из сомножителя вида
соответствует постоянной времениT
из сомножителя вида
![]() в
числителе передаточной функции (2.59).
в
числителе передаточной функции (2.59).
Если
сомножитель вида
![]() ,
соответствующий
,
соответствующий![]() присутствует в знаменателе (2.59), то
изменение наклона составляет -20∙
присутствует в знаменателе (2.59), то
изменение наклона составляет -20∙![]() .
.
В
случае, когда
![]() соответствует постоянной времениT
из сомножителя
вида
соответствует постоянной времениT
из сомножителя
вида
![]() ,
происходит изменение предыдущего
наклона на +40∙h,
если указанный сомножитель присутствует
в числителе
,
происходит изменение предыдущего
наклона на +40∙h,
если указанный сомножитель присутствует
в числителе
![]() ,
и на -40∙
,
и на -40∙![]() ,
если он присутствует в знаменателе.
,
если он присутствует в знаменателе.
Таким
же образом характеристика продолжается
в сторону увеличения частоты, претерпевая
соответствующие изломы на каждой
сопрягающей частоте
![]() .
При необходимости вид построенной ЛАХ
уточняется путем введения поправок для
колебательных звеньев.
.
При необходимости вид построенной ЛАХ
уточняется путем введения поправок для
колебательных звеньев.
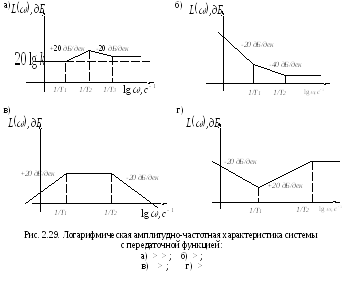
Примеры построения ЛАХ по различным передаточным функциям приведены на рис. 2.29.
В системе, состоящей из n параллельно соединенных звеньев (рис. 2.30), на вход каждому из звеньев подается один и тот же сигнал xвх(p), а их выходные сигналы суммируются:
![]() .
.
Так как
![]() ;
;
![]() ;
;
……………………………
![]() ,
,
то
x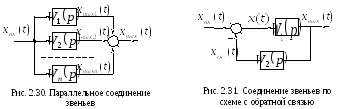 вых(p)
= xвых1(p)
+xвых2(p)+…+xвых(n)(p)
=
вых(p)
= xвых1(p)
+xвых2(p)+…+xвых(n)(p)
=
![]()
![]()
![]() .
.
Таким образом, передаточная функция параллельно соединенных звеньев равна сумме передаточных функций отдельных звеньев:
W(p)
=![]()
![]()
![]() .
(2.62)
.
(2.62)
Очевидно, что в случае, когда выходной сигнал какого-либо из параллельно соединенных звеньев поступает в сумматор со знаком «минус», передаточная функция этого звена входит в (2.62) также со знаком «минус».
Рассмотрим структуру системы с обратной связью (рис. 2.31). На вход звена, охваченного обратной связью, подается сигнал рассогласования, равный:
![]() .
.
Поскольку
![]() ,
то
,
то![]()
Изображение выходного сигнала:
xвых(р)=
![]()
![]()
![]()
откуда
![]() .
.
Следовательно, передаточная функция замкнутой системы (в замкнутом состоянии) описывается следующим выражением:
Ф(p)
=
![]() .
(2.63)
.
(2.63)
Передаточная функция (2.63) найдена для случая отрицательной обратной связи. Если обратная связь положительная, то
Ф(p)
=
![]() .
(2.64)
.
(2.64)
При анализе и синтезе CАУ, наряду с передаточной функцией (2.63) – (2.64), используются передаточная функция разомкнутой системы и передаточная функция по ошибке.
Передаточная функция разомкнутой системы (замкнутой системы в разомкнутом состоянии):
W(p)
=
![]() .
(2.65)
.
(2.65)
Передаточная функция по ошибке:
Фx(p)
=
![]()
![]()
![]() .
(2.66)
.
(2.66)