

-
Виды автоматических систем. Классификация элементов систем управления
При автоматизации производственного процесса используются две степени автоматизации – частичную или полную.
Частичная автоматизация энергетической установки предполагает использование автоматических устройств, для осуществления функций управления отдельными машинами и аппаратами не связанными в единую систему управления всей установки, например, автоматический контроль и регулирование ряда технологических параметров управляемого объекта. Пуск машин и аппаратов и установление заданного режима производиться вручную.
При полной автоматизации устройства автоматики управляют всеми основными и вспомогательными процессами. Функции пуска, остановки, изменения режима работы, определение оптимальных режимов работы и т.д. выполняются при помощи микропроцессорной техники и свободно программируемых ЭВМ. Обслуживание таких систем может быть периодическим (один раз в сутки, неделю и т.д.).
1.2.1. Система автоматического контроля
Система автоматического контроля (САК) предназначена для получения количественной информации о различных физических величинах (параметров) по которым оценивается технологический режим работы объекта автоматизации. Всякая САК состоит из элементов, узлов и устройств, выполняющих различные функции. Схематично САК может быть представлена структурой, приведенной на рис. 1.1
Датчик (Д) измеряет значение контролируемого параметра объекта (ОБ) контроля и преобразует его в сигнал, удобный для усиления и передачи. Для технологических измерений в основном используются датчики преобразующие неэлектрическую величину в электрический сигнал
Усилитель (У) – устройство усиливающее слабый сигнал, поступающий от датчика, до уровня достаточного для воздействия на исполнительный элемент.
Измерительное устройство (ИУ) – устройство, посредством которого фиксируется результат измерения.
ИУ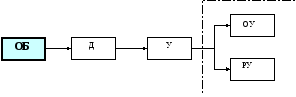
Рис.1.1. Функциональная схема системы автоматического контроля
В зависимости от вида измерительного устройства автоматический контроль подразделяют на две основные группы:
- с автоматическим отображением значений контролируемых параметров, имеющих в своем составе отсчетное устройство (ОУ) в виде стрелочного или цифрового прибора;
- с автоматической регистрацией значений контролируемого параметра на регистрирующее устройство (РУ), представляющее собой самописец, магнитный диск и т.д.
Система автоматического контроля также может объединить эти две функции, т.е. отображать и одновременно регистрировать текущие параметры технологического процесса.
1.2.2. Система автоматической сигнализации
Система автоматической сигнализации (САС) оповещает обслуживающий персонал с помощью световых и звуковых сигналов о том, что контролируемые параметры достигли характерных или предельных, опасных для установки значений. Структура САС приведена на рис.1.2.
HL
Р
ЭС x у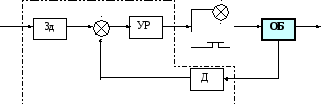
НА![]()
Рис.1.2 Функциональная схема системы автоматической сигнализации
Данная система может быть выполнена как в автономном варианте так и совмещенном.
Автоматическая САС в автономном варианте характеризуется тем, что имеет собственные устройства, такие как измерительный (датчик Д ), задатчик З, элемент сравнения ЭС, усилитель релейный УР, сигнальное устройство ( лампочка HL и зуммер НА ).
В совмещенной САС информационный сигнал формируется от устройств , входящих в состав других автоматических систем , таких как САК , САЗ или АСР .
Пояснение. Сигнализаторы, как правило, выполнятся на базе релейных элементов с электрическим выходом .
Система автоматической сигнализации, так же как и система автоматического контроля, не влияют на ход протекания технологического процесс в объекте ОБ, а только информируют оператора о его состоянии для принятия им решения .
1.2.3. Система автоматической защиты
Система автоматической защиты (САЗ) предназначена для своевременного отключения энергетической установки или отдельных ее устройств при достижении каким-либо контролируемым параметром предельно допустимой величины , способной вызвать аварийную ситуацию .
Функциональная схема САЗ приведена на рис.1.3. Система включает в себя защитное устройство (сигнализатор),исполнительный орган ПО с деблокирующим элементом ДЭ и объектов защиты ОБ
Системы автоматической защиты подразделяются на системы однократного действия с разовым деблокированием и повторного действия
В системах однократного действия исполнительный орган ИО после срабатывания защиты автоматически удерживается в отключенном состоянии не зависимо от последующего состояния контролируемого параметра у. Для возврата системы защиты в рабочее положение оператор вручную воздействует на деблокирующий элемент.
В системе повторного действия исполнительный орган ИО не имеет удерживающего элемента ДЭ, что исключает использование деблокирующего элемента ДЭ. Система самостоятельно возвращается в рабочее состояние после возвращения контролируемого параметра в допустимые (заданные ) пределы .