

3.4 Анализ передаточной функции известной части системы и выбор типа регулятора
На основе структурной схемы системы регулирования расхода получим передаточную функцию известной нам управляемой части:
![]() ,
,
где
![]() –
общий коэффициент усиления управляемой
части системы.
–
общий коэффициент усиления управляемой
части системы.
Анализируя
данное выражение, можем сделать вывод,
что наиболее неблагоприятными
динамическими характеристиками обладает
измерительный преобразователь, т.к.
имеет наибольшую постоянную времени
ТИП
=18,2,
подберем регулятор таким образом, чтобы
он компенсировал это влияние. Поскольку
измерительный преобразователь является
инерционный звеном, то для осуществления
управления возьмем ПИ-регулятор.
ПИ-регулятор обладает форсирующими
свойствами. Примем постоянную времени
ПИ-регулятора
![]() =18,2.
Передаточная функция ПИ-регулятора
будет иметь следующий вид:
=18,2.
Передаточная функция ПИ-регулятора
будет иметь следующий вид:
![]() ,
где
,
где
![]() –
постоянная времени ПИ-регулятора
–
постоянная времени ПИ-регулятора
Таким образом, задача сводится к определению коэффициента усиления регулятора kи. Для решения данной задачи воспользуемся ЭВМ с установленной на нее программой для анализа и синтеза линейных систем автоматического управления Classic 3.01.
4. Описание работы в программе classic 3.0.1
4.1 Ввод модели
Определив тип регулятора, вводим в программу структурную схему модели, соответствующую структурной схеме, изображённой на рисунке 4.

Рисунок 4. Структурная схема системы
Первому блоку присваиваем следующие параметры: название – ИП (измерительный преобразователь); атрибут – вход; один из трёх входов делаем отрицательным,данный вход будет выполнять функцию сумматора(каждое структурное звено имеет на входе сумматор входных сигналов) и вводим передаточную функцию измерительного преобразователя.
Второй блок: название – РЕГ (регулятор); передаточная функция ПИ – регулятора.
Третий блок: название – ИМ (исполнительный механизм); передаточная функция исполнительного механизма.
Четвёртый блок: название – ОБ (объект); атрибут – выход; передаточная функция объекта регулирования.
Соединяем между собой блоки. Отрицательную обратную связь образует линия, соединяющая выход четвёртого блока, с отрицательным входом первого блока.
Полученная модель системы, представленная на рис. 5., является эквивалентной структурной схеме системы автоматического регулирования уровня.

Рисунок 5. Структурная схема в программе CLASSIC.
4.2 Анализ модели
Введенную модель можно проанализировать, нажав на клавишу [F9]. Результаты анализа отображаются в четырех окнах.
В левом верхнем окне изображена корневая плоскость, с расположенными на ней нулями и полюсами передаточной функции.
В правом верхнем окне изображен переходный процесс.
В левом нижнем окне изображены частотные характеристики.
В правом нижнем окне изображена передаточная функция системы.
Чтобы подробно изучить характеристики в полноэкранном режиме нужно нажать на одну из четырех кнопок [Home], [End], [PageUp] и [PageDown]. Для получения подробной информации по любому из трёх графиков, необходимо щёлкнуть правой кнопкой мыши в поле одного из них и в появившемся меню воспользоваться пунктом показатели качества (сводка) [Ctrl+I]. На экране появится окно, с информацией, соответствующей графику.
Для настройки регулятора используем логарифмические характеристики разомкнутой системы регулирования. Для этого разомкнем цепь обратной связи, удалив связь клавишей [Delete] и проведем анализ. По виду логарифмических характеристик рис.7 видно, что логарифмическая частотная характеристика (ЛАХ) пересекает ось абсцисс с наклоном в -40 дБ/дек, что свидетельствует о колебательном процессе в системе.
Запас
устойчивости по амплитуде
![]() =
–19,48 дБ. Запас устойчивости по фазе:
=
–19,48 дБ. Запас устойчивости по фазе:![]() ,
где
,
где![]() -
частота среза (см. рис. 6). Таким образом,
мы получили систему с расходящимся
колебательным процессом.
-
частота среза (см. рис. 6). Таким образом,
мы получили систему с расходящимся
колебательным процессом.
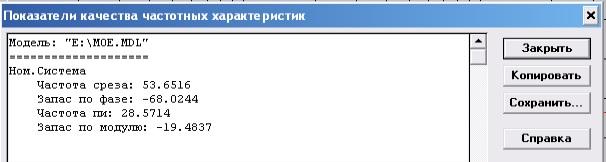
Рисунок 6. Показатели качества частотных характеристик ненастроенной системы.
Для
обеспечения сходящегося процесса в
системе необходимо, чтобы запас
устойчивости по фазе
![]() составлял не менее 20÷500.
Колебательный процесс в данном случае
не желателен из-за возникновения
перерегулирования в системе, повышения
динамических нагрузок на элементы
системы. Во избежание колебательного
процесса необходимо, чтобы ЛАХ в
окрестности точки частоты среза имела
наклон -20 дБ/дек, а запас устойчивости
по амплитуде был не менее 20 дБ. Окрестность
должна составлять 0,6÷0,9 декады в разных
направлениях от частоты среза.
составлял не менее 20÷500.
Колебательный процесс в данном случае
не желателен из-за возникновения
перерегулирования в системе, повышения
динамических нагрузок на элементы
системы. Во избежание колебательного
процесса необходимо, чтобы ЛАХ в
окрестности точки частоты среза имела
наклон -20 дБ/дек, а запас устойчивости
по амплитуде был не менее 20 дБ. Окрестность
должна составлять 0,6÷0,9 декады в разных
направлениях от частоты среза.

Рисунок 7. Частотные характеристики ненастроенной системы.