

3.2.3. Проверка результатов коррекции
Запас
по фазе для скорректированной системы:
 з=80.
з=80.
Запас по амплитуде для скорректированной системы: Lз=∞дб/дек.
Для построения графика переходного процесса используем, как и в предыдущем случае, численный метод решения дифференциального уравнения (75) с помощью программы MathCAD. Построенный переходный процесс представлен на рис. 14.
Начальное
время решения:

Конечное
время решения:

Число
точек решения:

Вспомогательный
индекс:

Функция для правых частей:
 (15.11)
(15.11)
Решение дифференциального уравнения методом Рунге-Кутта:
 (15.12)
(15.12)
Конечный результат для вычисления переходного процесса:
 (15.13)
(15.13)
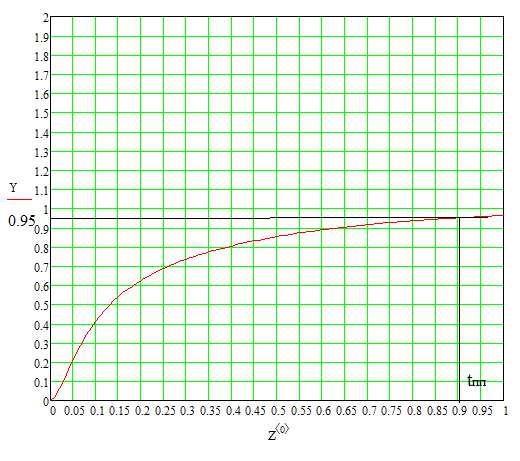
Рис.14 Переходной процесс скорректированной системы.
По этому графику находим время переходного процесса в скорректированной системе:
tпп2 = 0,91 с.
Из графика переходного процесса скорректированной системы (рис 14) видно что добавление корректирующего звена влечет увеличение времени переходного процесса, т. к. исходная система до корректировки была простой, а добавление в нее корректирующего звена ее усложняет.
Заключение
Целью курсового проекта было исследования системы автоматического регулирования температуры жидкости в резервуаре.
В результате исследования были определены передаточные функции звеньев системы: объекта регулирования, исполнительного механизма и измерительного преобразователя.
Данная система была приведена к устойчивости и определена на устойчивость по критерию Гурвица. Была построена область устойчивости системы в плоскости параметров постоянной времени исполнительного механизма Tим и коэффициента усиления датчика kд, и проверенная на правильность произвольной точкой. Характеристический полином замкнутой системы, содержащий эту точку, проверен на устойчивость при помощи алгебраического критерия Гурвица. Критерий устойчивости Гурвица подтвердил устойчивость системы.
Так же система исследовалось на качество настройки посредством построения графика переходного процесса, определена его длительность tпп =3,7 с. При этом в системе присутствует динамическая ошибка ▲в=-0.099 Yз (р)-0.2Yз(р)+..... Перерегулирование в системе отсутствует. Переходной процесс носит апериодический характер. По графикам ЛАХ и ЛФХ были определены запасы по фазе и амплитуде:
Lз=∞. φз= 520.
Качество системы удовлетворяет требованиям. Большинство расчетов производилось с помощью программы MathCAD
Был проведен синтез системы автоматического управления путем последовательного включения корректирующего звена. Построена желаемая ЛАХ и ЛАХ корректирующего звена. По виду ЛАХ корректирующего звена была найдена передаточная функция звена и его реализация пассивным RC-четырехполюсником. Был построен график переходного процесса скорректированной системы. По графику определена длительность переходного процесса tпп2=0.91c. Время переходного процесса превышает время переходного процесса исходной системы из чего можно сделать вывод, что последовательная коррекция в данной системе не имеет актуальности.