

3. Схемотехническая реализация результатов синтеза
Полученные в результате синтеза уравнения булевой алгебры являются универсальным средством для проектирования автоматов на любой элементной базе, а также для программирования микроконтроллеров, используемых в управляющих системах электроавтоматики. Принципы программирования контроллеров на примере универсального логического модуля LOGO компании “Siemens” с использованием графического редактора ”LOGO Soft Comfort” достаточно подробно рассмотрены в работе 4. Рассмотрим основные правила построения схем жесткой логики как для релейно-контактных, так и для бесконтактных логических элементов.
Построение релейно-контактных схем. Практически до 70-х годов прошлого века все устройства электроавтоматики были реализованы на релейно-контактных элементах. Однако и в настоящее время, несмотря на бурное развитие микроэлектроники, силовая часть и многие элементы электроавтоматики строятся на релейной основе. Кроме того, релейный аналог схемы позволяет производить логический анализ работы автомата и программирование контроллеров на языке релейно-лестничной логики (РЛЛ).
Правила построения релейных схем:
1. Выходные функции соответствуют катушкам реле, контакторов или электромагнитов исполнительных механизмов, а контакты – входным и внутренним промежуточным переменным автомата.
2. Исходная булева функция должна быть минимальной и преобразована в нормальную форму (МДНФ или МКНФ), при этом под знаком инверсии не должно быть более одной переменной;
3. Прямому значению переменной в логическом уравнении соответствует замыкающий контакт реле в принципиальной схеме.
4. Инверсному значению логической переменной соответствует размыкающий контакт реле;
5. Конъюнкция переменных соответствует последовательному соединению контактов.
6. Дизъюнкция переменных соответствует параллельному соединению контактов.
7. Роль элементов памяти в релейных схемах выполняют дополнительные реле, контакты которых носят характер внутренних переменных автомата.
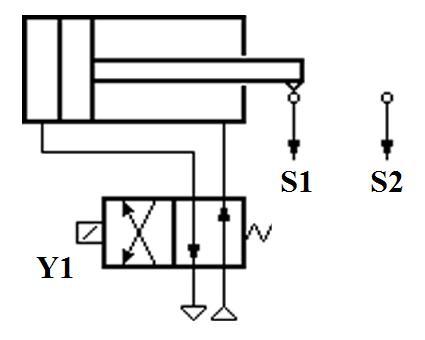
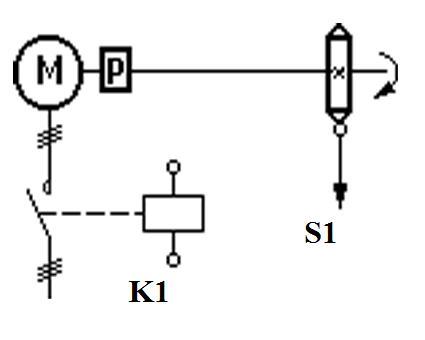
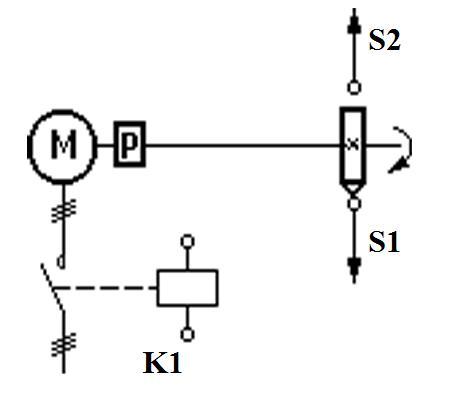
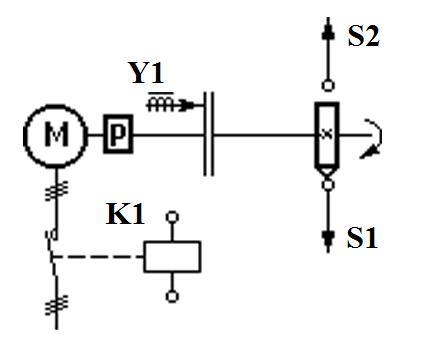
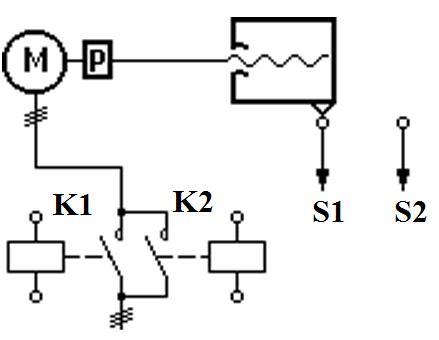
Схема пуска и останова обычно реализуется на контактных элементах. Основными составляющими такой схемы являются кнопки «Пуск» и «Стоп», а также пусковое реле. В качестве пускового реле для устройства, представленного на функциональной схеме (см. рис. 15), можно использовать контактор К1, который при запуске включает двигатель М1, постоянно работающий в течение всего автоматического цикла до нажатия кнопки «Стоп».
Систему пуска-останова можно проиллюстрировать следующим графом функционирования

Здесь SB1 – кнопка «Пуск», а SB2 – кнопка «Стоп». Синтез схемы сводится к определению функции К1, т.е. цепи управления контактором К1.
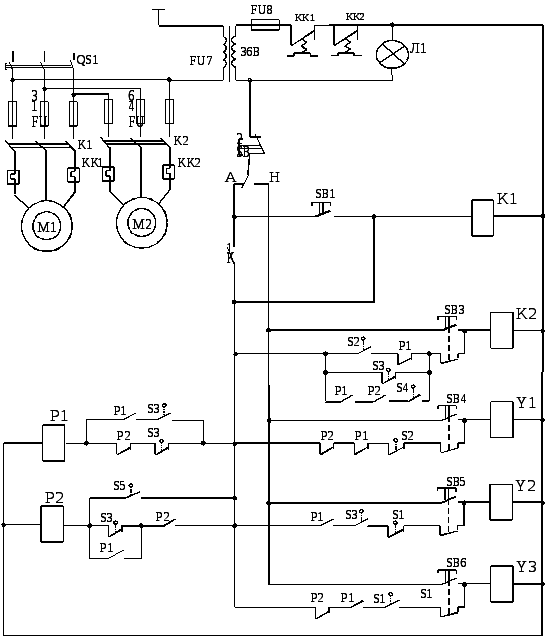 Рис.
17
Рис.
17
Д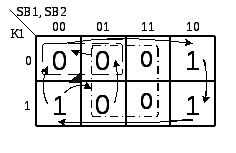 ля
функции К1 существенными переменными
будутSB1
и SB2,
однако для устранения противоречия при
синтезе, введем квазисущественную
переменную – собственный блокировочный
контакт пускового реле К1.
ля
функции К1 существенными переменными
будутSB1
и SB2,
однако для устранения противоречия при
синтезе, введем квазисущественную
переменную – собственный блокировочный
контакт пускового реле К1.
К1 = SB1, SB2, К1 . Строим матрицу Карно для трех переменных.
Чтобы не допустить возможного включения установки при нажатой кнопке SB2 «Стоп», проставим нули в «фиктивных» клетках матрицы 111 и 110. При этом минимизировать функцию удобнее выделяя подкубы по нулевым состояниям. Получим
К1
=
![]() ·
(SВ1
+ К1).
·
(SВ1
+ К1).
Пример релейно-контактной схемы, реализующей автомат управления технологической установкой, представленной функциональной схемой (рис. 15), показан на рис. 17. На схеме, кроме логической части, представлена силовая часть подключения электродвигателей М1 и М2, а также схема пуска-останова и схема переключения режимов Н – «наладка» и А – «автоматика».
Построение схем на бесконтактных логических элементах основана на применении современных интегральных схем серии 1533, 1564 и пр. Промышленность выпускает достаточно разнообразные типы микросхем, реализующих основные логические функции, и построить схему автомата можно пользуясь различными логическими элементами. Чаще всего схемотехническая реализация дискретных автоматов осуществляется на пяти функционально полных системах (базисов): «И» – конъюнкция; «ИЛИ» – дизъюнкция; «НЕ» – инверсия; «И-НЕ» – базис Шеффера; «ИЛИ-НЕ» – базис Вебба (стрелка Пирса). Причем последние два базиса носят универсальный характер, поскольку позволяют реализовать на своей основе практически любую булеву функцию. На этих базисах построены наиболее распространенные интегральные микросхемы типа ЛА1 –«2(4И-НЕ)», ЛА3 – «4(2И-НЕ)», ЛА4 – «3(3И-НЕ)», ЛЕ1 – «4(2ИЛИ-НЕ)», ЛЕ» – «2(4ИЛИ-НЕ)» и др. Преобразование булевых функций для реализации на базисах типа «И-НЕ» и «ИЛИ-НЕ» осуществляется с помощью теоремы двойной инверсии и теоремы де Моргана.
Правила построения бесконтактных схем:
1. Необходимо выбрать элементную базу, на которой будет производиться проектирование автомата.
2. Все булевы функции, составляющие математическую модель автомата, минимизировать и привести к виду, состоящему из тех элементарных логических операций, на которых основан выбранный базис.
3. Каждой элементарной логической операции в полученном уравнении должен соответствовать элемент, реализующий эту операцию.
4. При многократной входимости в уравнении одной булевой функции в другую по конъюнкции, дизъюнкции или инверсии построение схемы следует начинать от последней внутренней входимости и заканчивать внешней.
Например,
пусть имеется исходное уравнение
![]() .
.
Базис «И-НЕ». Для преобразования функции для этого базиса нужно избавиться от дизъюнкций и охватить все выражение общей инверсией.
![]() =
=
![]() =
=![]() (см. схему на рис. 18а).
(см. схему на рис. 18а).
Базис «ИЛИ-НЕ». Здесь для преобразования функции нужно избавиться от конъюнкций и тоже охватить все выражение общей инверсией.
![]() =
=
![]() =
=![]() =
=![]() .
Схема, реализующая это логическое
выражение, представлена на рис. 18б.
.
Схема, реализующая это логическое
выражение, представлена на рис. 18б.
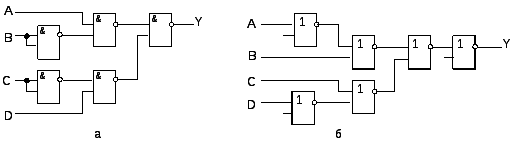
Рис. 18
Следует заметить, что базис «И-НЕ» выгодно применять для реализации булевых функций в МДНФ, а базис «ИЛИ-НЕ» – для функций в МКНФ.
Элементы
памяти в бесконтактных логических
схемах.
Основой построения последовательностных
схем дискретных автоматов являются
элементы с устойчивыми состояниями –
триггеры.
Существует большое разнообразие
триггерных схем, и в инженерной практике
нет необходимости синтезировать эти
схемы, достаточно хорошо знать принцип
их работы и применять как типовые,
подвергая синтезу лишь их входы. Наиболее
широкое применение находит асинхронный
RS-триггер.
В простейшем своем исполнении он имеет
два выхода: прямой – Q
и инверсный –
![]() ,
которые всегда имеют противоположное
состояние, и два входа:S
– установка (Set)
и R
– сброс (Rezet).
На рис. 19 показаны условное обозначение
RS-триггера,
его временная диаграмма и схемотехническая
реализация на базе двух элементов «ИЛИ
– НЕ».
,
которые всегда имеют противоположное
состояние, и два входа:S
– установка (Set)
и R
– сброс (Rezet).
На рис. 19 показаны условное обозначение
RS-триггера,
его временная диаграмма и схемотехническая
реализация на базе двух элементов «ИЛИ
– НЕ».
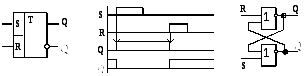
Рис. 19
Триггер является устройством с устойчивыми состояниями и имеет в отличие от контактного реле два входа, и эти особенности необходимо учитывать и при синтезе цепей управления его входов. При построении расширенного графа в вершинах, соответствующих включению и выключению элементов памяти, записываются альтернативные состояния S- и R-входов. Граф функционирования, например, для автоматического устройства (см. рис. 15) будет следующим:

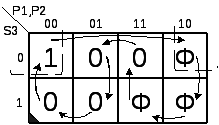
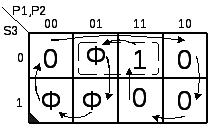
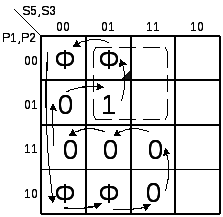
Произведем синтез входов триггеров SP1, RP1, SP2 и RP2. Существенные переменные остаются теми же, что и при синтезе Р1 и Р2, поэтому и матрицы будут теми же, только для входов R значения функций будут инверсными.
SP1
=
![]() ·
·![]() RP1
=
RP1
=
![]() ·
Р2
·
Р2
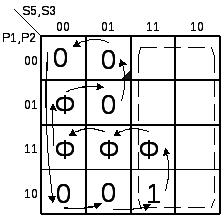
SP2
=
S5
RP2
=
![]() ·
S3
·
S3
Как и следовало ожидать, булевы функции, определяющие цепи входов триггеров, получились значительно проще, чем для релейных элементов памяти с одним входом.
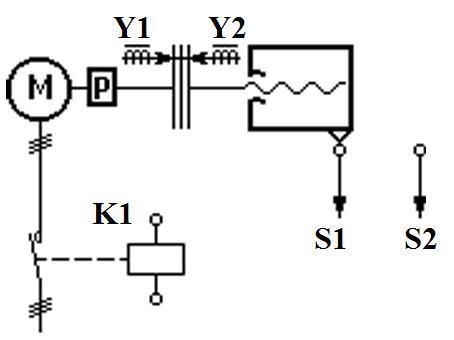
Для построения принципиальной бесконтактной схемы автомата выбираем базис, на котором она будет реализована. Следует выбирать ту элементную базу, на которой принципиальная схема будет проще и потребует наименьшее количество элементов. Для нашего примера наиболее выгодно выбрать базис Вебба (ИЛИ-НЕ). Под выбранный базис, с использованием теорем двойной инверсии и закона де Моргана, преобразуем булевы функции, полученные в результате синтеза.
К2
=
![]() +S2·
+S2·![]() +S4·Р1·Р2
=
+S4·Р1·Р2
=
![]() =
=
=
![]()
Y1
=
![]() ·
·![]() ·
·![]() =
=
![]() =
=
![]()
Y2
=
![]() ·S3·Р1
=
·S3·Р1
=
![]() =
=
![]()
Y3
= S1·Р1·![]() =
=
![]() =
=
![]()
SP1
=
![]() ·
·![]() =
=
![]() =
=
![]() RP1
=
RP1
=
![]() ·
Р2
=
·
Р2
=
![]() =
=
![]()
SP2
=
S5
RP2
=
![]() ·
S3
=
·
S3
=
![]() =
=![]()
Принципиальная схема автомата, реализованная на бесконтактных элементах, представлена на рис. 20.
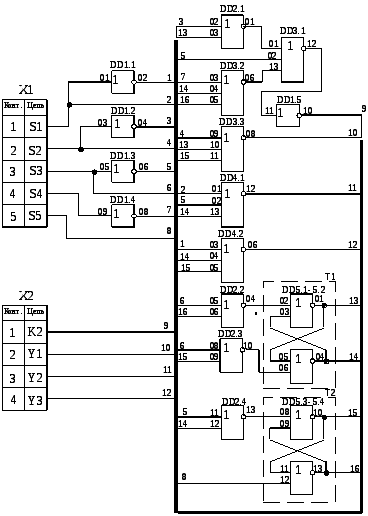 Рис.
20
Рис.
20
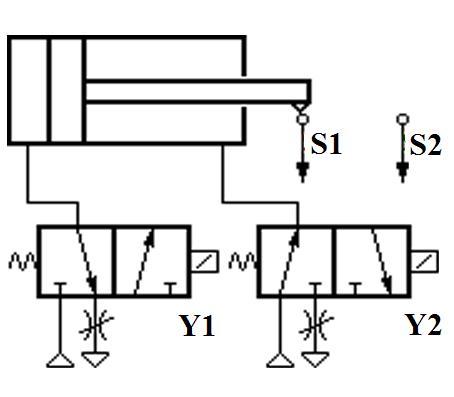
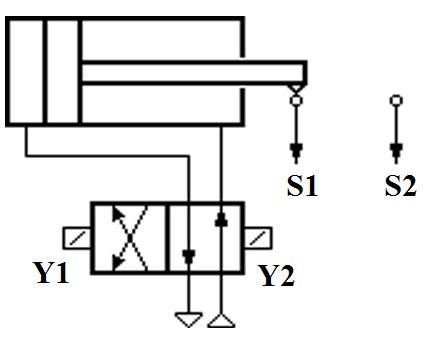
Задание на самостоятельную работу: В соответствии с заданным вариантом алгоритма работы механизмов (табл. 6 и 7) произвести анализ работы автоматической установки, построить циклограмму работы, граф переходов и граф функционирования, произвести синтез дискретной системы управления и по полученным в результате синтеза логическим уравнениям построить принципиальные релейно-контактную и бесконтактную схемы.
Таблица 6
Варианты заданий для самостоятельной работы
-
Вариант
задания
Алгоритм работы
Механизмы
A
B
C
D
1
2
3
4
5
6
1
D – A – nA– B – C – nC – nD – nB
11
7
1
5
2
B – A – nC – C – D – nB – nD – nA
3
7
5
9
3
C – D – A – nA – B – nD – nC – nB
1
5
8
9
4
B – A – C – nC – D – nB – nD – nA
10
8
5
3
5
D – A – nA – B – nD – C – nB – nC
1
4
7
12
6
D – A – nA – B – nD – C – nB – nC
8
10
5
3
7
C – B – nC – A – nA – D – nD – nB
3
5
7
9
8
B – A – C – D – nC – nD – nA – nB
1
4
7
10
9
C – A – D – nC – B – nB – nA – nD
2
5
8
11
10
A – D – B – nB – nD – B – nB – nA
2
8
-
12
11
A – D – B – nB – C – nD – nA – nC
11
9
6
2
12
C – nC – B – A – C – nA – nB – nC
8
10
6
-
13
D – nD – B – C – nB – A – nC – nA
1
4
7
12
14
C – D – nD – nC – A – B – nA – nB
2
4
8
6
15
C – nC – B – nB – D – A – nD – nA
3
5
8
12
16
C – A – B – D – nD – nC – nA – nB
2
5
9
11
17
C – A – nC – C – B – nA – nC – nB
2
4
9
-
18
C – B – nC – nB – A – D – nA – nD
9
10
6
5
19
C – A – B – nC – nA – D – nB – nD
1
5
7
12
20
C – A – B – D – nD – nA – nB – nC
7
3
5
11
21
D – B – nD – A – C – nB – nA – nC
3
5
10
9
22
C – A – D – nC – B – nA – nB – nD
12
7
6
2
23
D – C – nC – nD – A – B – nA – nB
5
9
11
2
24
A – B – D – nD – C – nC – nA – nB
12
4
3
8
25
A – B – D – nD – C – nC – nA – nB
6
10
9
5
26
A – B – nA – A – nB – C – nA – nC
11
5
7
-
27
A – B – C – nC – D – nD – nA – nB
5
1
8
3
28
A – nA – B – C – A – nB – nC – nA
8
6
2
-
29
A – C – B – D – nD – nA – nC – nB
4
10
7
1
30
D – C – B – nC – A – nA – nD – nB
2
6
10
8
31
D – A – nA – B – C – nC – nD – nB
3
5
7
9
32
B – A – C – nC – D – nB – nD – nA
1
8
6
10
33
C – D – A – nA – B – nD – nC – nB
10
8
5
3
34
B – A – C – nC – D – nB – nD – nA
1
6
7
12
Продолжение табл. 6
-
1
2
3
4
5
6
35
D – A – nA – B – nD – C – nB – nC
11
2
5
9
36
B – A – C – D – nD – nA – nB – nC
3
7
5
9
37
C – B – nC – A – nA – D – nD – nB
1
4
8
10
38
B – A – C – D – nC – nD – nA – nB
2
6
7
11
39
C – A – D – nC – B – nB – nA – nD
3
8
12
2
40
A – D – B – nB – C – nD – nA – nC
3
4
10
8
41
D – A – nA– B – C – nC – nD – nB
7
3
5
11
42
B – A – nC – C – D – nB – nD – nA
3
5
10
9
43
C – D – A – nA – B – nD – nC – nB
12
7
6
2
44
B – A – C – nC – D – nB – nD – nA
5
9
11
2
45
D – A – nA – B – nD – C – nB – nC
12
4
3
8
46
D – A – nA – B – nD – C – nB – nC
6
10
9
5
47
C – B – nC – A – nA – D – nD – nB
11
5
7
1
48
B – A – C – D – nC – nD – nA – nB
5
1
8
3
49
C – A – D – nC – B – nB – nA – nD
8
6
2
12
50
A – D – B – nB – nD – B – nB – nA
4
10
-
1
51
A – D – B – nB – C – nD – nA – nC
2
6
10
8
52
C – nC – B – A – C – nA – nB – nC
3
5
7
-
53
D – nD – B – C – nB – A – nC – nA
1
8
6
10
54
C – D – nD – nC – A – B – nA – nB
10
8
5
3
55
C – nC – B – nB – D – A – nD – nA
1
6
7
12
56
C – A – B – D – nD – nC – nA – nB
11
2
5
9
57
C – A – nC – C – B – nA – nC – nB
3
7
5
9
58
C – B – nC – nB – A – D – nA – nD
1
4
8
10
59
C – A – B – nC – nA – D – nB – nD
2
6
7
11
60
C – A – B – D – nD – nA – nB – nC
3
8
12
2
61
D – B – nD – A – C – nB – nA – nC
2
9
6
11
62
C – A – D – nC – B – nA – nB – nD
11
7
1
5
63
D – C – nC – nD – A – B – nA – nB
3
7
5
9
64
A – B – D – nD – C – nC – nA – nB
1
5
8
9
65
A – B – D – nD – C – nC – nA – nB
10
8
5
3
66
A – B – nA – A – nB – C – nA – nC
1
4
7
-
67
A – B – C – nC – D – nD – nA – nB
8
10
5
3
68
A – nA – B – C – A – nB – nC – nA
3
5
7
-
69
A – C – B – D – nD – nA – nC – nB
1
4
7
10
70
D – C – B – nC – A – nA – nD – nB
2
5
8
11
71
D – A – nA – B – C – nC – nD – nB
2
8
3
12
72
B – A – C – nC – D – nB – nD – nA
11
9
6
2
73
C – D – A – nA – B – nD – nC – nB
8
10
6
5
74
B – A – C – nC – D – nB – nD – nA
1
4
7
12
Окончание табл. 6
-
75
D – A – nA – B – nD – C – nB – nC
2
4
8
6
76
B – A – C – D – nD – nA – nB – nC
3
5
8
12
77
C – B – nC – A – nA – D – nD – nB
2
5
9
11
78
B – A – C – D – nC – nD – nA – nB
2
4
9
12
79
C – A – D – nC – B – nB – nA – nD
9
10
6
5
80
A – D – B – nB – nD – B – nB – nA
1
5
-
10
81
A – D – B – nB – C – nD – nA – nC
7
3
5
11
Таблица 7
Варианты механизмов
|
№ |
Схема механизма |
Условная запись хода |
|
1 |
2 |
3 |
|
1 |
|
Прямой ход:
|
|
Обратный ход:
| ||
|
Цикл
| ||
|
2 |
|
Прямой ход:
|
|
Обратный ход:
| ||
|
Цикл
|
Продолжение табл. 7
|
1 |
2 |
3 |
|
3
|
|
Прямой ход:
|
|
Обратный ход:
| ||
|
Цикл
| ||
|
4 |
|
Прямой ход:
|
|
Обратный ход:
| ||
|
Цикл
| ||
|
5 |
|
Прямой ход:
|
|
Обратный ход:
| ||
|
Цикл
|




Продолжение табл. 7
|
1 |
2 |
3 |
|
6
|
|
Прямой ход:
|
|
Обратный ход:
| ||
|
Цикл
| ||
|
7 |
|
Прямой ход (от 0 до 180º):
|
|
Обратный ход (от 180 до 360º):
| ||
|
Цикл: (от 0 до 360º)
| ||
|
8 |
|
Прямой ход (от 0 до 180º):
|
|
Обратный ход (от 180 до 360º):
| ||
|
Цикл: (от 0 до 360º)
|

Продолжение табл. 7
|
1 |
2 |
3 |
|
9
|
|
Прямой ход (от 0 до 180º):
|
|
Обратный ход (от 180 до 360º):
| ||
|
Цикл: (от 0 до 360º)
| ||
|
10 |
|
Прямой ход:
|
|
Обратный ход:
| ||
|
Цикл
| ||
|
11 |
|
Прямой ход:
|
|
Обратный ход:
| ||
|
Цикл
|

Окончание табл. 7
|
12
|
|
Прямой ход:
|
|
Обратный ход:
| ||
|
Цикл
|
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Андреев Н.П. Синтез цикловых систем логико-программного управления технологическим оборудованием с применением ЭВМ: Учеб. пособие. – Омск: Изд-во ОмГТУ, 1995. – 92 с.
Аристов В.В., Гудинов В.Н. Сборник заданий и упражнений по дискретной математике: Практикум. – Омск: Изд-во ОмГТУ, 2006. – 52 с.
Аристов В.В. Основы теории автоматов: Конспект лекций.– Омск: Изд-во ОмГТУ, 2006. – 84 с.
Гудинов В.Н., Аристов В.В., Корнейчук А.П. Программная реализация логических функций управления цикловым технологическим оборудованием: Метод. указания к лаб. работам. – Омск: Изд-во ОмГТУ, 2002. – 20 с.
Андреев Н.П., Васильченко А.И., Гудинов В.Н. Основы синтеза дискретных систем управления: Сб. задач и упражнений. – Омск: Изд. ОмПИ, 1989. – 49 с.
Чернов Е.А. Проектирование станочной электроавтоматики. – М.: Машиностроение, 1989. – 304 с.
Акимов О.Е. Дискретная математика: логика, группы, графы. – М.: Лаборатория Базовых Знаний, 2001. – 376 с.
Горбатов В.А. Основы дискретной математики: Учеб. пособие для студентов вузов. – М.: Высш. шк., 1986. 3–11 с.
Горбатов В.А. Семантическая теория проектирования автоматов. – М.: Энергия, 1979. – 264 с.
Гаврилов М.А., Девятков В.В., Пупырев Е.И. Логическое проектирование дискретных автоматов. – М.: Наука, 1977. – 352 с.