

4.Структуры измерительных устройств
Структуры измерительных устройств бывают:
Разомкнутые структуры с последовательным соединением звеньев. (Рис. 4.1.)

Рис.4.1.
2. Разомкнутые структуры с параллельным соединением звеньев (Рис. 4.2)

Рис. 4.2.
Структуры со встречно – параллельным соединением звеньев (Рис. 4.3)
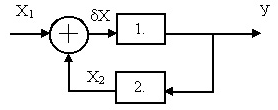
Рис.4.3.
Смешанные структуры.
При построении смешанных структур могут быть использованы все три приведенные выше структуры.
4.1.Расчет характеристик по структурным схемам
Для
определения функциональной зависимости
![]() необходимо:
необходимо:
Выделить элементарные звенья структуры.
Определить характеристики звеньев по их физическим схемам.
Составить уравнения преобразования для каждого звена.
Решается система уравнений с учетом их связей.
Определим уравнение преобразования для приведенных выше структур:
1.Структура с последовательным соединением звеньев.

Определим чувствительность S
![]() .
.
Графический способ
определения функциональной зависимости
![]() .
.

2. Структура с параллельным соединением звеньев.

![]()
![]()
Графический способ определения функциональной зависимости.

3. Структура со встречно – параллельным соединением звеньев


![]()
![]()
Третья структура уступает по быстродействию последовательной и параллельной, но превосходит их по точности. (Происходит обмен чувствительности на точность.)
Примечание: структуры бывают:
а) Астатические структуры (интегратор).
б) Статические структуры (дифференциальное звено).
![]() –не компенсационная
структура.
–не компенсационная
структура.
![]() –компенсационная
структура.
–компенсационная
структура.
![]() – компенсационная.
– компенсационная.
Графический способ определения функциональной зависимости.

4.2. Контрольные вопросы.
Как классифицируются структуры ИУ?
Каков алгоритм составления уравнения преобразования для структур ИУ?
Как получить уравнение преобразования для последовательной структуры?
Как составить уравнение преобразования для параллельной структуры ИУ?
Как составить уравнение преобразования для вторично-параллельной структуры?
Как графически получить уравнение преобразования для различных видов структуры ИУ?
5. ПОГРЕШНОСТИ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ.
Причины возникновения:
Погрешность может быть обусловлена выбором того или иного измерительного преобразователя. Например, если выбрать емкостный измерительный преобразователь для измерения перемещения, то мы заранее получаем нелинейную зависимость изменения емкости от перемещения, что обуславливает погрешность линейности.
Изменения внутренних дестабилизирующих факторов
 и внешних
и внешних
 вызывают неопределенность функциональной
зависимости
вызывают неопределенность функциональной
зависимости
 .
.
В зависимости от вида зоны неопределенности реальной характеристики появляются те или иные погрешности. Далее рассмотрим классификацию погрешностей по наиболее существенным признакам.
5.1 Классификация погрешностей
1. По размерности погрешности делятся на:
а) абсолютные
![]() ;
;
б) относительные
![]() ;
;
в) приведенные
![]()
![]()


2.По характеру связи погрешности с входной величиной = f(x)
Погрешности делятся на: аддитивные; мультипликативные; аддитивные и мультипликативные; аддитивные, мультипликативные и степенные.
При аддитивной
составляющей погрешности номинальная
характеристика ![]() смещается
параллельно самой себе, что по другому
называют погрешностью нулю. Абсолютная
погрешность
смещается
параллельно самой себе, что по другому
называют погрешностью нулю. Абсолютная
погрешность ![]() не
изменяется вдоль диапазона. Относительная
погрешность
не
изменяется вдоль диапазона. Относительная
погрешность ![]() увеличивается к
началу диапазона. Приведенная погрешность
относится к концу диапазона
увеличивается к
началу диапазона. Приведенная погрешность
относится к концу диапазона ![]() .
.
![]()
