

Решение трансцендентных уравнений
1. Решение трансцендентных уравнений методом дихотомий.
Во многих инженерных и научных задачах возникает необходимость решения уравнений вида:
-
F(x, a1, a2, ..., ak) = 0
(3.1)
где F - заданная непрерывная функция;
x – неизвестная величина, подлежащая определению;
a1, a2, ..., ak – известные параметры функции F.
Решить уравнение (3.1) - это значит найти такое значение (или такие значения) неизвестной x, при которых уравнение (3.1) превращается в тождество. Эти значения x называются корнями уравнения (3.1).
Только для простейших уравнений удается найти решение в аналитическом виде, т.е. записать формулу
x = f(a1, a2, ..., ak) ,
выражающую искомую величину x явным образом через параметры a1, a2, ..., ak, например, для уравнения вида
ax2 + bx + c = 0
его корни выражаются формулой:
![]() .
.
В большинстве же случаев аналитическую запись корней уравнения найти очень сложно или в принципе невозможно (такие уравнения называются трансцендентными), и поэтому приходится решать уравнение численным способом.
Метод дихотомии
Пусть на этапе отделения корней получены две точки A и B (A<B), между которыми находится корень уравнения (3.1), т.е. такие точки, в которых знаки значений функции F(x) противоположны (см. рис.3.2): sign F(A) sign F(B).
Метод дихотомии, называемый еще методом половинного деления, заключается в следующем:
1) определяется середина отрезка [A,B]:
-
 ;
;(3.2)
2) вычисляется значение функции в этой точке - F(P) и его знак sign F(P);
3) корень уравнения (3.1) находится в той половине отрезка [A,B], на концах которой функция F(x) имеет разные знаки. Если это будет половинка [A,P], то перенесем точку B в точку P; если же половинка [P,B], то перенесем точку A в точку P. Благодаря этой операции длина отрезка [A,B], на котором находится корень уравнения, уменьшилась вдвое, т.е. можно сказать, что значение корня определено с точностью до длины полученного отрезка.
Каждое
новое повторение действий 1,2,3 будет
давать все более точные значения корня
уравнения. Повторение этого процесса
следует прекращать, когда длина отрезка
[A,B]
станет меньше заранее заданного значения
![]() ,
являющегося в данном случае ошибкой
ограничения, т.е. неравенство
,
являющегося в данном случае ошибкой
ограничения, т.е. неравенство
-
B - A <
(3.3)
является критерием окончания вычислительного процесса.
Если величина задана очень малая, то вблизи корня значения F(x) могут оказаться сравнимыми с погрешностью ее вычисления, т.е. при подходе к корню вычислительный процесс может попасть в так называемую "полосу шума", и дальнейшее уточнение корня окажется невозможным. Поэтому кроме точности надо задавать в алгоритме ширину "полосы шума" 1 и прекращать процесс при попадании в него, т.е. неравенство F(P) | < 1 является дополнительным критерием окончания вычислительного процесса.
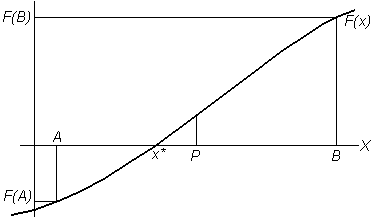
Рис.3.2. Геометрическая интерпретация метода дихотомии