

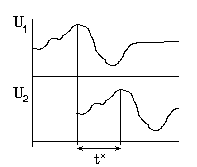
Корреляционный способ измерения скорости
И
 змеряет
скорость движения ленты, полосы.
Фотодатчики воспринимают сигнал,
отраженный от полосы, он усиливается,
и получаются функции U1
и U2. Так как отражающая
поверхность полосы непостоянная (более
и менее гладкие, светлые участки), то
функции будут выглядеть так: . U1=F(t);
U2=F(t);
t*=L/V-время
за которое лента проходит расстояние
L со скоростью V.
Функции U1 и U2
похожи.
змеряет
скорость движения ленты, полосы.
Фотодатчики воспринимают сигнал,
отраженный от полосы, он усиливается,
и получаются функции U1
и U2. Так как отражающая
поверхность полосы непостоянная (более
и менее гладкие, светлые участки), то
функции будут выглядеть так: . U1=F(t);
U2=F(t);
t*=L/V-время
за которое лента проходит расстояние
L со скоростью V.
Функции U1 и U2
похожи.
t* - разница во времени
![]() -
элемент задержки.
-
элемент задержки.
Можно изменять
![]() до тех пор, пока интеграл не станет max.
Это делается автоматически экстремальным
регулятором (ЭР). Считывание скорости
происходит от величины
.
до тех пор, пока интеграл не станет max.
Это делается автоматически экстремальным
регулятором (ЭР). Считывание скорости
происходит от величины
.
Измерение ускорений и параметров вибрации
Инерционный датчик ускорения
В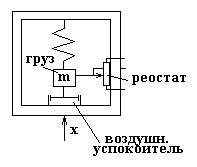 ходная
величина – перемещение датчика в
вертикальном направлении. При этом на
груз действует сила F=ma,
эта сила компенсирует Fпр.
Перемещение груза пропорционально
ускорению и измеряется реостатным
датчиком.
ходная
величина – перемещение датчика в
вертикальном направлении. При этом на
груз действует сила F=ma,
эта сила компенсирует Fпр.
Перемещение груза пропорционально
ускорению и измеряется реостатным
датчиком.
Fпр=с*x
Fпр=F
a=x*c/m
x=a*m/c
Резонансная частотная характеристика (т.к. есть элемент, запасающий кинетическую энергию, и есть элемент, запасающий потенциальную энергию).
Датчик не работает в области резонанса, воздушный успокоитель снижает резонанс.
При измерении ускорения работают в области <0/4. При работе в низкочастотной области перемещение груза пропорционально ускорению, т.е. входная величина – ускорение, выходная величина – перемещение. В высокочастотной области масса слишком инерционна, она не успевает сдвинуться с места, входная величина – перемещение, выходная величина – сопротивление.
Измерение механических усилий.
Усилия бывают:
сосредоточенные;
рассредоточенные.
Сосредоточенные усилия – линейные и крутящие (моменты).
Рассредоточенные усилия – давление и внутренние механические напряжения.
Сосредоточенные усилия можно измерить непосредственно: пъезомагнитоупругие, которые усилие преобразуют в перемещение.
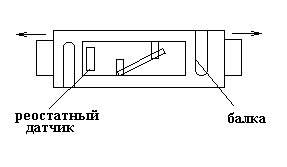
Балки изгибаются, при этом происходит перемещение полки. Она действует на рычаг и происходит перемещение. Упругий элемент – балка.
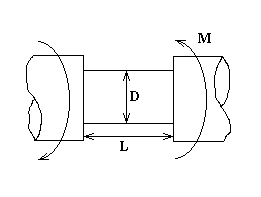
Измерение крутящих моментов
Датчики, использующие закручивание датчика упругого вала.
![]()
G – модуль скольжения
![]() - длина сечения
- длина сечения
Jp – полярная величина
М – момент
Для измерения угла поворота сечений
 могут использоваться любые датчики,
например – емкостный датчик:
могут использоваться любые датчики,
например – емкостный датчик:
Е мкость
образуется пластинами. При закручивании
изменяется площадь пластины, а
следовательно изменяется емкость. Если
вал вращается, то нужны контактные
кольца, щетки.
мкость
образуется пластинами. При закручивании
изменяется площадь пластины, а
следовательно изменяется емкость. Если
вал вращается, то нужны контактные
кольца, щетки.
Б
 есконтактный
оптический датчик:
есконтактный
оптический датчик:
Если М=0, то одного диска совпадают с вырезами другого. При увеличении момента, сечения закручиваются, и площадь перекрытия отверстий уменьшается.
Датчики для измерения внутренних механических напряжений вала.
П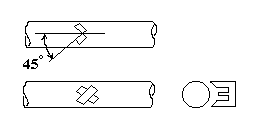 ри
отсутствии механических напряжений
свойства изотропны. Если М=0, то магнитное
поле первой обмотки не пересекает
магнитного поля второй. При возникновении
механического напряжения магнитное
поле деформируется и при этом магнитное
поле 1-й обмотки пересекает магнитное
поле 2-й обмотки и появляется Uвых
~ М.
ри
отсутствии механических напряжений
свойства изотропны. Если М=0, то магнитное
поле первой обмотки не пересекает
магнитного поля второй. При возникновении
механического напряжения магнитное
поле деформируется и при этом магнитное
поле 1-й обмотки пересекает магнитное
поле 2-й обмотки и появляется Uвых
~ М.