

Уральский федеральный университет
имени первого Президента России Б.Н. Ельцина
Кафедра «Детали машин»
Оценка за проект
Члены комиссии:
Анализ и синтез механизмов
технологической машины
Наименование машины: сбрасыватель.
Курсовой проект
по теории механизмов и машин
Пояснительная записка
1703.303110.001.ПЗ
Руководитель В.М.Душкин
Студент И.Е.Антонов
гр. ММВ-221001Се
Екатеринбург
2014
Введение
Изучение дисциплины «теория машин и механизмов» завершается выполнением курсового проекта. В ходе курсового проектирования развивается умение использовать на практике знания, полученные при изучении не только данной, но и ранее пройденных дисциплин, приобретаются навыки работы со справочной литературой и государственными стандартами.
В настоящем проекте необходимо решить следующие задачи:
– произвести структурный анализ рычажного механизма;
– проверить работоспособность рычажного механизма по условию существования кривошипа и благоприятной передачи сил в механизме. Если указанные условия не выполняются, то следует изменить длины звеньев в задании на проект.
- Произвести структурный анализ механизма;
- Провести кинематический анализ механизма;
– Определить реакции во всех кинематических парах рычажного механизма в заданных его положениях;
– Произвести синтез эвольвентного зубчатого зацепления по заданным условиям;
– Выполнить синтез заданного кулачкового механизма.
1.Задание на проектирование
Наименование машины: Сбрасыватель
Кинематические схемы механизма показаны на рис. 1. Размеры и массы звеньев рычажного механизма указаны в табл. 1. Q= 400 Н - усилие, действующее на ползун Е. Центры тяжести звеньев, обозначенные буквой S, расположены на серединах длин звеньев

Е

 Q
Q


 Д
Д
 С
С



А

В
О

Р ис.
1. Кинематическая схема рычажного
механизма
ис.
1. Кинематическая схема рычажного
механизма
Кинематическая схема кулачкового механизма показана на рис. 2.
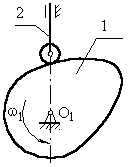
Рис. 2. Кинематическая схема кулачкового механизма
Фазовые
углы поворота кулачка
φу
= 700;
φс
= 700;
φвв
= 400.
Максимальный
ход толкателя
hmax
=0,05 м
Максимально допускаемый угол давления max =900 - мin = 900 – 650= 350 Диаграмма аналогов ускорений толкателя кулачкового механизма показана на рис. 3.

 а
φвв
= 40
а
φвв
= 40



 φу
= 700 .
φс
= 700
φу
= 700 .
φс
= 700






 Ф1
Ф2
Ф3
Ф4
Ф5
Ф1
Ф2
Ф3
Ф4
Ф5
О
Рис. 3. Диаграмма аналогов ускорений толкателя
Таблица 1. Исходные данные для проекта
Наименование параметра |
Обозначение и величина |
Длина кривошипа ОА, м |
|
Длина шатуна АВ, м |
LAB = 0,25 |
Длина коромысла ВC, м |
|
Длина шатуна ЕD, м |
LDE = 0,29 |
Длина коромысла СD м |
|
а, м |
0,32 |
b, м |
0,22 |
c, м |
0,2 |
Вес кривошипа ОА, н |
G1 = 200 |
Вес шатуна АВ, н |
G2 = 400 |
Вес коромысла BD, н |
G 3= 700 |
Вес шатуна DE, н |
G4 = 500 |
Вес ползуна E, н |
G5 =600 |
Моменты инерции звеньев IS i относительно их центров тяжести, кг·м2. |
IS1=0,2; IS2=0,2; IS3=0,4; IS4=0,25 |
Частота вращения кривошипа, об/ мин |
n1 = 800 |
Коэффициент неравномерности хода машины |
[δ] = 1/25 |
Числа зубьев зубчатых колес рядной зубчатой передачи |
Z1 = 11; Z2 = 15. |
Модуль зубчатой передачи, мм. |
m = 10 |