

2.3 Расчет активных и индуктивных сопротивлений схемы ад.
Активные и индуктивные сопротивления, значения которых нужно рассчитать, показаны на рис.1, где изображена Г-образная схема замещения одной фазы АД.
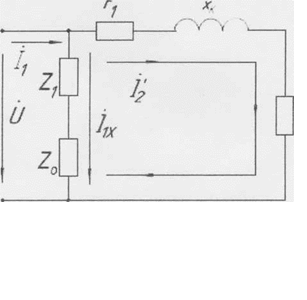
Здесь:
 и
и
 –
комплексное и активное сопротивление
обмотки статора,
–
комплексное и активное сопротивление
обмотки статора,
 –
активное
сопротивление обмотки ротора, приведенного
к обмотке статора,
–
активное
сопротивление обмотки ротора, приведенного
к обмотке статора,
 –
индуктивное
сопротивление обмоток для режима
короткого замыкания (при неподвижном
роторе),
–
индуктивное
сопротивление обмоток для режима
короткого замыкания (при неподвижном
роторе),
 – комплексное
сопротивление поперечной ветви для
Т-образной схемы замещения АД,
– комплексное
сопротивление поперечной ветви для
Т-образной схемы замещения АД,
S – скольжение ротора,
 – напряжение
питания,
– напряжение
питания,

 – ток
холостого хода,
– ток
холостого хода,
 -
ток в обмотке ротора, приведенный к
обмотке статора,
-
ток в обмотке ротора, приведенный к
обмотке статора,
 – потребляемый
ток.
– потребляемый
ток.
Согласно:
+
= ,
где
,
где
 =
/
=1,02
=
/
=1,02 1,06.
1,06.
 Значение
сопротивлений
,
и
нужно рассчитывать в следующей
последовательности.
Значение
сопротивлений
,
и
нужно рассчитывать в следующей
последовательности.
 =
= /
/ =1,02
1,10,
=1,02
1,10,
Рекомендуется принимать =1,05.
Где и - номинальные электромагнитный и вращающий моменты.

Эта
формула получена в Приложении к методике
расчетов.
 =0,58
0,67.
=0,58
0,67.
Рекомендуется
принять
=0,61.
Ожидаемые значения отношения
 =
/
- от десятых долей единицы до нескольких
единиц.
=
/
- от десятых долей единицы до нескольких
единиц.

 См
См




Формулы для и также получены в Приложении к методике расчетов.
Здесь
и ниже в формулах мощности
 и
и
 нужно употреблять в Ваттах (Вт).
нужно употреблять в Ваттах (Вт).
При
=380/220В
фазное напряжение
=220В,
а 3 /2=72600
/2=72600 .
.
Рассчитанные значения сопротивлений , и нужно проверить по формулам, полученным, исходя из выражений для номинального и максимального электромагнитных моментов (см. Приложение):

 =
=
Сопротивление
нужно определять после расчета знаний
тока холостого хода АД
 и разности фаз
и разности фаз
 этого тока и напряжения питания.
этого тока и напряжения питания.
Расчет значений характеристик АД для режима холостого хода при номинальных значениях напряжения питания и частоты изменения этого напряжения
 .
.
 Необходимые
расчетные формулы для тока холостого
хода
=
Необходимые
расчетные формулы для тока холостого
хода
= и угла
между векторами
и угла
между векторами
 и
и
 можно получить, используя векторную АД
диаграмму для номинального режима
работы АД, изображенную в приложении
1.
можно получить, используя векторную АД
диаграмму для номинального режима
работы АД, изображенную в приложении
1.
 Угол
ОВА между векторами
Угол
ОВА между векторами
 и
и
 равен
равен
 -
- ,
потому что сумма этого угла с другим
острым углом треугольника ВОА равна
внешнему углу ВАС с величиной
-
.
,
потому что сумма этого угла с другим
острым углом треугольника ВОА равна
внешнему углу ВАС с величиной
-
.
Значения тока = и угла нужно рассчитывать в следующей последовательности.
Потребляемые мощность и фазный ток:
 =2146,624/0,76=2824,505
=2146,624/0,76=2824,505

Ток в обмотке ротора, приведенный к обмотке статора:

Угол между векторами тока и напряжения :
 =43,945
=43,945
Угол между векторами тока и напряжения :
 =4.449
=4.449
Ток = нужно рассчитывать по теореме косинуса для треугольника ОВА (см. рис. 2):



 Значение
угла
практически не зависит, а ток
зависит от значений напряжения Uи
частоты его изменения f.
Значение
угла
практически не зависит, а ток
зависит от значений напряжения Uи
частоты его изменения f.
Потребляемая мощность:

Скорость
вращения вала при холостом ходе АД
 очень близка к скорости вращения
магнитного поля статора
очень близка к скорости вращения
магнитного поля статора
 ,
но меньше
из-за магнитных и механических потерь
в АД.
,
но меньше
из-за магнитных и механических потерь
в АД.

Результаты расчета характеристик нужно записать в табл. 3
Сопротивление схемы замещения АД (см. рис. 1) нужно определять по формулам:
 ,
,


 ,
,
