

2.2 Описание элементов следящего электропривода
2.2.1 Преобразователь ве-178 а
Оршанский инструментальный завод выпускает датчик угловых перемещений фотоэлектрический ВЕ-178 А (Z-2500).
Преобразователь служит для преобразования угловых перемещений в электрические импульсы и предназначается для информационной связи по положению между позиционируемым объектом и устройством числового программного управления (УЧПУ) или устройством цифровой индикации (УЦИ). Внешний вид преобразователя и его габаритные размеры приведены на рисунке 2.2.1.1 Основные технические характеристики преобразователя приведены в таблицу 2.2.1.1

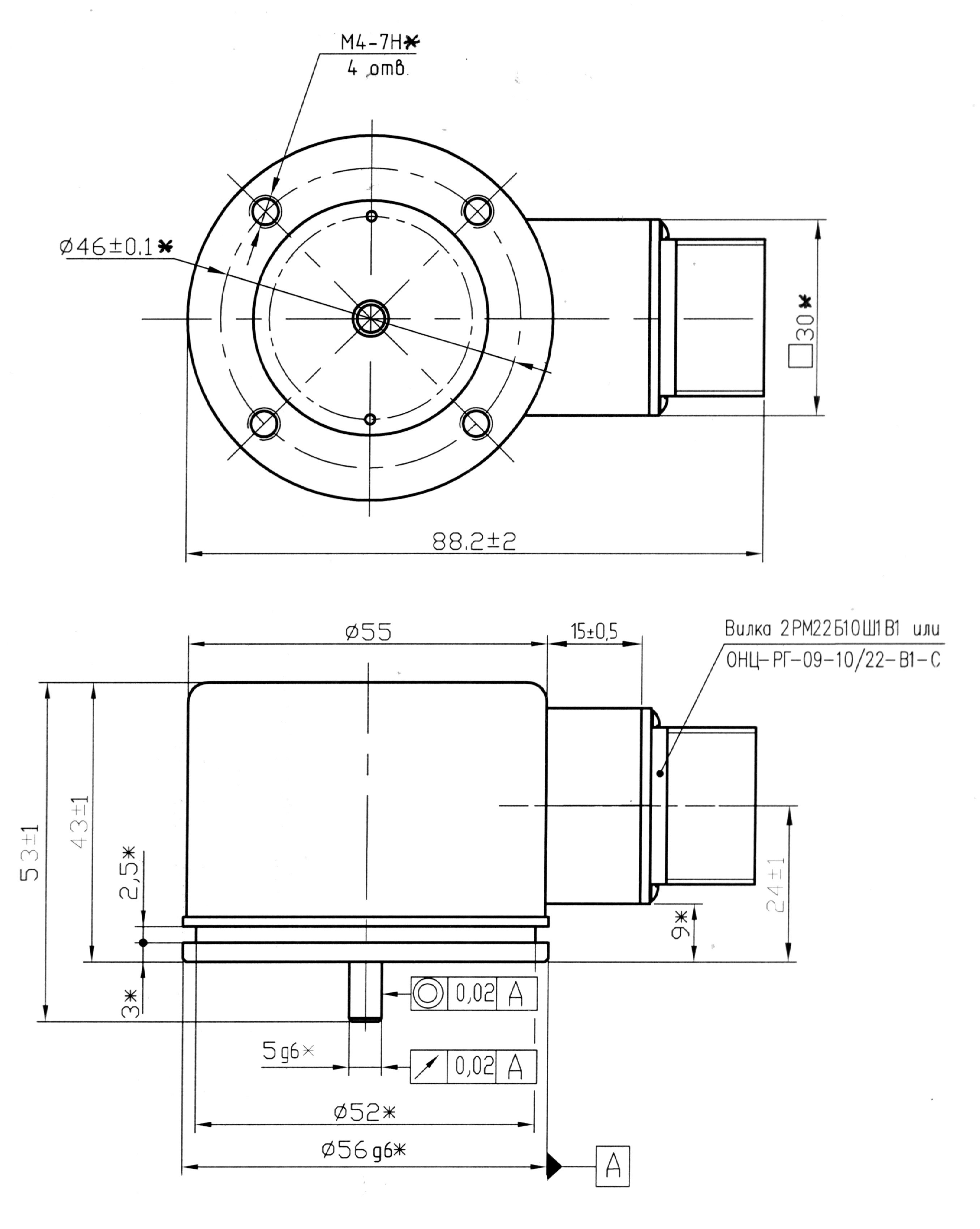
Рисунок 2.2.1.1 – датчик угловых перемещений фотоэлектрический ВЕ-178 А (Z-2500) и габаритные размеры.
Таблица 2.2.1.1 - Технические характеристики преобразователя угловых перемещений ВЕ-178 А.
Число штрихов измерительного лимба |
2500 |
Максимальная скорость вращения вала |
6000 мин-1 |
Сигналы на выходе |
А B C |
Допустимая нагрузка на вал |
радиальная 10 Н, осевая 5 H |
Масса |
0,4 кг |
Степень защиты |
IP54 |
Рабочая температура |
0….40оС |
Напряжения питания |
5В±5% |
Ток потребления |
150 мА |
Число импульсов |
2500 |
Максимальная частота выходного сигнала |
100 кГц |
Форма импульсов |
Прямоугольная |
Преобразователи угловых перемещений (фотоэлектрические) осуществляют преобразование измеряемого перемещения в последовательность электрических сигналов, содержащих информацию о величине и направлении этих перемещений для последующей обработки в сервоприводах или системах с ЧПУ.
В частности преобразователи угловых перемещений могут применяться в измерительных системах, системах программного управления станков и механизмов при определении угловых размеров, перемещений на поворотных рабочих столах, делительных устройствах, антеннах и другом оборудовании.
Принцип
работы преобразователей основан на
фотоэлектрическом считывании растровых
и кодовых сопряжений. В состав
преобразователя входит растровое
измерительное звено, состоящее из
подвижного измерительного растра 1 и
неподвижного индикаторного растрового
анализатора 2. В состав растрового
анализатора входят 4 поля считывания
![]() каждое
из которых имеет пространственный
сдвиг относительно предыдущего на
1/4 периода растра. Параллельный световой
поток, сформированный конденсором 7
осветителя 3, проходя через растровое
сопряжение, анализируется 4x квадрантным
фотоприемником 6.
каждое
из которых имеет пространственный
сдвиг относительно предыдущего на
1/4 периода растра. Параллельный световой
поток, сформированный конденсором 7
осветителя 3, проходя через растровое
сопряжение, анализируется 4x квадрантным
фотоприемником 6.
Соединенные соответствующим образом фотоприемники позволяют получить два ортогональных токовых сигнала Ia и Ib, постоянная составляющая которых не зависит от уровня освещенности. Наличие двух ортогональных измерительных сигналов позволяет определить направление перемещении и повысить разрешающую способность преобразователей при обработке этих сигналов в электронных блоках преобразователей.
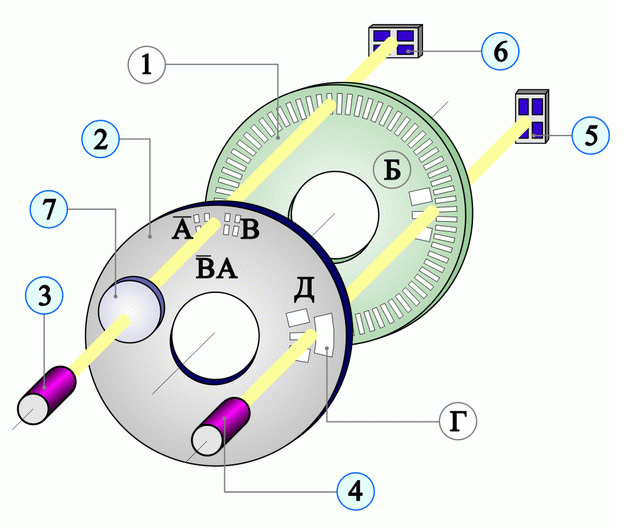
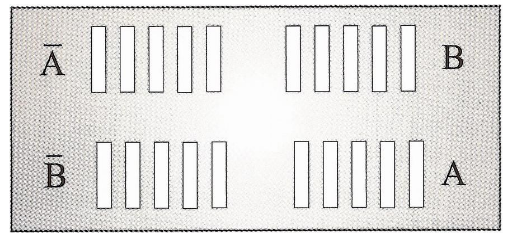
Рисунок 2.2.1.2 – Принцип действия фотоэлектрического датчика
Из рис. 2.2.1.3 видно, что сигнал Ia опережает сигнал Ib при вращении по часовой стрелке измерительного лимба, жестко связанного с валом преобразователя.
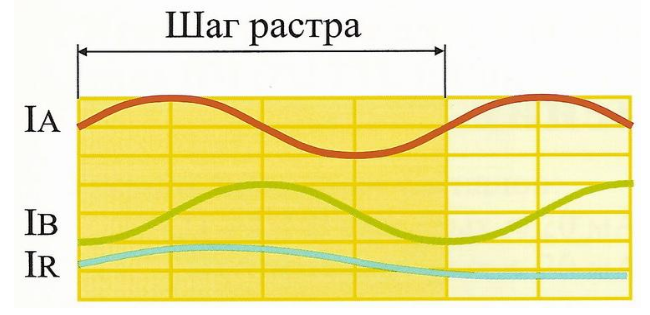
Рисунок 2.2.1.3 – Выходные сигналы датчика
Кроме измерительных сигналов перемещения преобразователь имеет сигнал референтной метки. Этот сигнал, показанный на рисунке 2.14. как IR, вырабатывается, в общем случае, один раз за оборот вала и позволяет использовать преобразователь как датчик положения. При полном совпадении аналогичных кодовых растров Д и Б световой поток, принимаемый одной из секций фотоприемника 5 в 3-4 раза больше, чем при любом другом взаимном положении этих кодовых растров.
Ширина сигнала референтной метки по уровню 1/2 от ее амплитуды не превышает периода одного из сигналов перемещения. Для фиксирования этого уровня вне зависимости от интенсивности осветителя 4 организован опорный сигнал: световой поток осветителя 4 через диафрагму Г поступает на вторую секцию фотоприемника 5.
Если требуется определить положение вала преобразователя внутри полного оборота, используется система пространственно-кодированных референтных меток либо вместо референтных меток наносится специальный однодорожечный код положения (квазиабсолютный датчик).