

Теоретические и экспериментальные показатели качества линеаризованного контура тока приведены в таблице 2.7.1.1.
Таблица 2.7.1.1– Показатели переходных процессов контура тока
Показатели переходных процессов |
|||
по управлению |
|||
|
|
|
|
Ожидаемые показатели |
|||
0,00668 |
0,00668 |
4,3 |
0 |
Результаты моделирования |
|||
0,0067 |
0,0067 |
4,3 |
0 |
По результатам сравнения ожидаемых и экспериментально полученных показателей качества можно сделать выводы о том, что они практически совпадают.
2.7.2 Оптимизация контура скорости
Малая постоянная времени контура скорости
![]() с.
с.
Коэффициент обратной связи по скорости
 В·с/рад.
В·с/рад.
Коэффициент передачи входной цепи регулятора скорости
![]() ,
,
где
![]() Вс/рад
– коэффициент передачи датчика скорости.
Вс/рад
– коэффициент передачи датчика скорости.
Контур скорости настраиваем на симметричный оптимум (СО). С учетом параметров контура выбираем ПИ – регулятор с передаточной функцией
![]() ,
,
Коэффициент усиления регулятора скорости
![]() .
(4)
.
(4)
Постоянная времени регулятора скорости
![]() с.
с.
Контур скорости, настроенный по СО, имеет следующие передаточные функции:
– разомкнутого контура
 =
(5)
=
(5)

![]() .
.
– замкнутого контура по управлению без фильтра на входе

 (6)
(6)
 Передаточная
функция фильтра на входе
Передаточная
функция фильтра на входе
![]() .
.
Постоянная времени фильтра
![]() с.
с.
Передаточная функция замкнутого контура скорости с фильтром на входе
 =
(7)
=
(7)
![]()
Ожидаемые показатели работы замкнутого контура скорости, настроенного по СО, при отработке ступенчатого управляющего воздействия:
– установившаяся ошибка
![]() ;
;
перерегулирование,
 ;
;время первого согласования
 ;
;время переходного процесса при отработке ступенчатого управляющего воздействия
 ;
;
- полоса пропускания по фазе
![]() с-1;
с-1;
![]() Гц.
Гц.
- полоса пропускания по модулю
![]() с-1.
с-1.
![]() Гц.
Гц.
Имитационное моделирование контура скорости выполняется по структурной схеме рисунка 2.7.2 .1 с использованием программ SIMULINK .
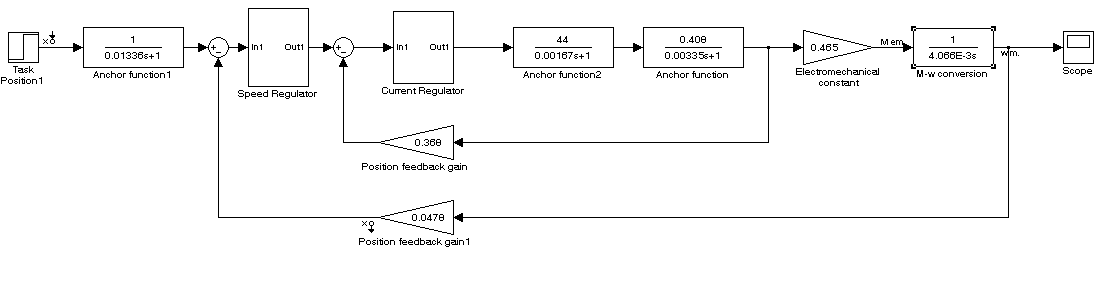
Рисунок 2.7.2.1 - Имитационная модель контура скорости, настроенного на СО
Теоретические и экспериментальные показатели качества линеаризованного контура скорости приведены в таблице 10.2.1.
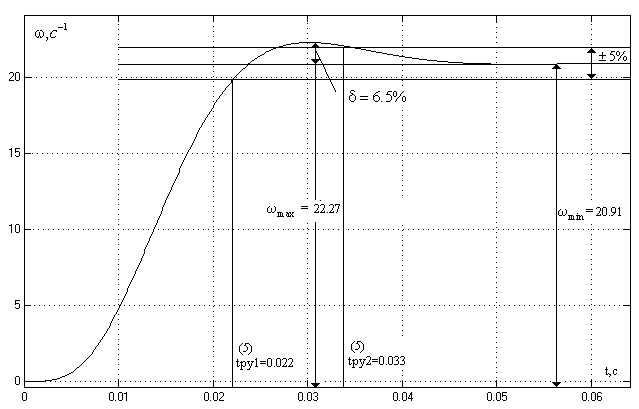
Рисунок 2.7.2.2 - Переходная функция при отработке ступенчатого
управляющего воздействия контура скорости, настроенная
на СО с фильтром на входе при Uзс=1В
Таблица 2.7.2.1 - Показатели переходных процессов по управлению контура скорости, настроенного на СО
, с |
, с |
|
|
Ожидаемые показатели |
|||
0,0227 |
0,0339 |
6,2 |
0 |
Результаты моделирования |
|||
0,022 |
0,033 |
6,5 |
0 |
По результатам сравнения ожидаемых и экспериментально полученных показателей качества можно сделать выводы о том, что они практически совпадают.
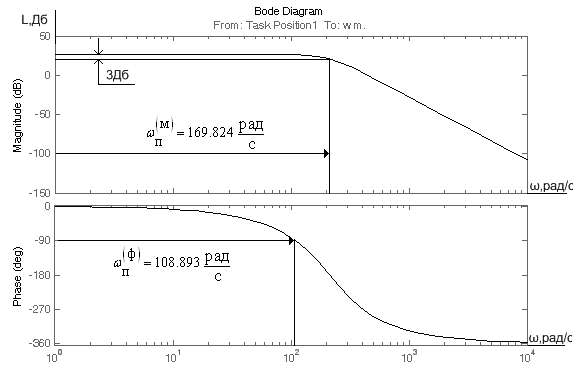
Рисунок 2.7.2.3 – ЛЧХ замкнутого контура скорости, настроенного на СО
Полоса пропускания замкнутого контура скорости:
– по модулю:
![]()
 ;
;
– по фазе:
![]()
 .
.