

М
![]() ИНИСТЕРСТВО
ОБРАЗОВАНИЯ И НАУКИ
ИНИСТЕРСТВО
ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего
профессионального образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Энергетический институт
Направление (специальность) – 140610 Электрооборудование и электрохозяйство предприятий, организаций и учреждений
Кафедра – Электропривода и электрооборудования
ЦИФРОАНАЛОГОВЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД
КООРДИНАТНОГО СТОЛА
(Тема выпускной квалификационной работы)
Выпускная квалификационная работа
на соискание квалификации инженер
ФЮРА.454345.001 ПЗ
(Обозначение документа)
Студент гр. 7460 |
____________ ____________ (подпись) (дата) |
Ю. Ю. Измайлов |
|
|
|
|
|
Руководитель |
|
|
|
доцент, канд. техн. наук |
____________ ____________ (подпись) (дата) |
Н. В. Гусев |
|
|
|
|
|
Консультанты: |
|
|
|
по экономике старший преподаватель |
____________ ____________ (подпись) (дата) |
М. А. Саленко |
|
|
|
|
|
по безопасности жизнедеятельности доцент, канд. техн. наук |
____________ ____________ (подпись) (дата) |
Ю. В. Бородин |
|
|
|
|
|
по иностранному языку старший преподаватель |
____________ ____________ (подпись) (дата) |
А.К. Столярова |
|
|
|
|
|
Допустить к защите: |
|
|
|
Заведующий кафедрой доцент, канд. техн. наук |
____________ ____________ (подпись) (дата) |
Ю. Н. Дементьев |
|
|
|
|
|
Томск – 2011
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ
ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего
профессионального образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра Электропривода и электрооборудования
УТВЕРЖДАЮ:
Зав.кафедрой___________Ю.Н.Дементьев
«_____»_______________ 2011 г.
ЗАДАНИЕ
на выполнение выпускной квалификационной работы
Студенту гр.7460 Измайлову Юрию Юрьевичу
Тема выпускной квалификационной работы
Цифроаналоговый следящий электропривода координатного стола
утверждена приказом ректора (распоряжением директора ЭНИН) от
10.05.2011 № 2184/c
Срок сдачи студентом готовой работы 01.06.2011 г
Исходные данные к работе
3.1. механическая подсистема: винт-гайка качения;
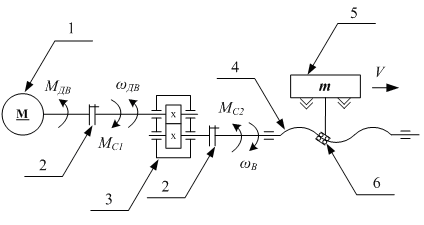
1 – электродвигатель;
2 – жёсткая муфта;
3 – редуктор с передаточным числом iред = 12, КПД редуктора ηред = 0,94 и приведённым к валу двигателя значением зазора ±Δз/2 = 3,054∙10-4 рад;
4 – ходовой винт длиной lв = 0,8 м, со средним диаметром резьбы dв = 34 мм и шагом резьбы tв = 6 мм;
5 – перемещаемый узел массы m = 129,7 кг;
6 – гайка качения;
Mдв – вращающий момент, развиваемый приводным двигателем;
ωдв, ωв – соответственно угловая скорость двигателя и винта;
ΔMс1, ΔMс1 – соответственно моменты сопротивления первой и второй массы;
V – скорость перемещения стола;
Fтр, Fпод – сила трения и сила подачи.
Параметры механической подсистемы:
- передаточное число iред = 12,
- КПД редуктора ηред = 0,94;
- приведённый к валу двигателя зазор ±Δз/2 = 3,054∙10-4 рад;
- длина ходового винта длиной lв = 0,8 м;
- средний диаметр резьбы dв = 34 мм
- шагом резьбы tв = 6 мм;
- премещаемый узел массы m = 129,7 кг;
3.2. В качестве регулируемого электропривода принять электропривод установленный на экспериментальной установке:
- регулируемый электропривод «КЕМЕК»
- параметры двигателя приведены в таблице
Тип двигателя |
Pн, кВт |
Mн, Нм |
Iн, А |
nн/nмакс, мин-1 |
Rяд, Ом |
Mмакс, Нм |
Ce, Вс |
J, кгм2 |
1ПИ12.07 |
0,24 |
2,3 |
6,8 |
2000 |
1,36 |
10 |
0,465 |
410-3 |
Содержание текстового документа (перечень подлежащих разработке вопросов)
Обзор современных систем управления многокоординатными СЭП на базе PCNC, расчёт параметров и моделирование цифроаналогового следящего электропривода, программное обеспечение и экспериментальное исследование 2-х координатного СЭП, производственная и экологическая безопасность, организационно-экономическая часть.
5. Перечень графического материала (с точным указанием обязательных чертежей):
– структурная схема модели в среде MatLab 7.5;
– переходные характеристики в контурах тока, скорости и положения;
– функциональная схема лабораторной установки;
– графики изменения векторных и координатных ошибок;
– технико-экономические показатели.
6. Консультанты по разделам выпускной квалификационной работы (с указанием разделов)
6.1 Экономическая часть – М.А.Саленко
6.2 Безопасность и экологичность проекта – Ю. В. Бородин
6.3 Иностранная часть – А.К Столярова
7. Дата выдачи задания на выполнение выпускной квалификационной работы
04.09.2010 г
Руководитель: |
__________ подпись |
__________ дата |
Н.В. Гусев
|
Задание принял к исполнению: |
|||
|
__________ подпись |
__________ дата |
Ю.Ю.Измайлов
|
Реферат
Выпускная квалификационная работа содержит 137 страницы текста, 54 рисунка, 34 таблицы , 15 использованных источников.
ЦИФРОАНАЛОГОВЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД КООРНАТНОГО СТОЛА
В первой главе представлен обзор установок селективной пайки печатных плат.
Во второй главе произведён расчёт параметров и моделирование цифроаналогового СЭП.
Третья глава содержит безопасности и экологичность проекта, где освещены вопросы: производственная санитария, техника безопасности, пожарная безопасность, охрана окружающей среды.
В четвертой главе представлен экономический расчёт сметы затрат на создание лабораторного стенда, освещены вопросы планирования выполнения этапов работ разрабатываемого проекта.
Пояснительная записка ВКР выполнена в текстовом редакторе Microsoft Word 2003, также использовались программы МаthCad 14, среда «Simulink» пакета «MATLAB», Microsoft Visio 2007.
СОДЕРЖАНИЕ
Введение 9
1 ОБЗОР СОВРЕМЕННЫХ СИСТЕМ УПАРАВЛЕНИЯ МНОГОКООРДИНАТНЫМИ ЭЛЕКТРОПРИВОДАМИ 10
1.1 Обзор архитектур СУ многокоординатных ЭП устройств 10
высокоточного перемещения 10
1.2 Обзор установок селективной пайки печатных плат 15
1.3 Требования, предъявляемые к современным системам ЧПУ 21
1.4 Требования к отработке траекторий движения следящих электроприводов 25
2 СИНТЕЗ ЛИНЕЙНОЙ МОДЕЛИ СЭП И РАСЧЁТ СИЛОВОЙ ЧАСТИ 28
2.1 Обоснование структурной схемы САУ СЭП 28
2.2 Описание элементов следящего электропривода 32
2.2.1 Преобразователь ВЕ-178 А 32
2.2.2 Программируемый модуль ввода/вывода UNIOxx-5 35
2.2.3 Модуль аналогового ввода-вывода с гальванической развязкой AI16-5A-1 38
2.3 Механическая часть системы 42
2.4 Регулируемый электропривод «КЕМЕК» 43
2.5 Расчет параметров следящего электропривода 47
2.5.1 Модель кинематической цепи механизма 47
2.5.2 Расчет параметров силовой цепи 51
2.5.3 Параметры тиристорного преобразователя 53
2.6 Расчет электромеханических характеристик разомкнутой 53
системы преобразователь-двигатель 53
2.7 Определение оптимальных настроек контуров СЭП 56
2.7.1 Оптимизация контура тока 56
2.7.2 Оптимизация контура скорости 60
2.7.3 Оптимизация контура положения 64
2.8 Определение ожидаемых показателей качества работы СЭП 67
3 МОДЕЛИРОВАНИЕ В СРЕДЕ MATLAB И ПРОВЕДЕНИЕ ЭКСПЕРЕМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ 69
3.1 Линеаризованная модель СЭП 69
3.2 Нелинейная модель ЦАСЭП в среде MatLab 7.5 70
3.3 Результаты исследования модели 2-х координатного следящего электропривода стола 77
3.4 Экспериментальные исследование влияния частоты квантования на точность отработки траектории движения 81
3.4.1 Линейная интерполяция 81
3.4.2 Круговая интерполяция 85
4 ПРОИЗВОДСТВЕННАЯ И ЭКОЛОГИЧЕСКАЯ БЕЗОПАСНОСТЬ 88
4.2 Анализ опасных и вредных факторов 88
4.3 Анализ причин поражения электрическим током 89
4.4 Техника безопасности 90
4.5 Статическое электричество 91
4.6 Производственная санитария 91
4.7 Расчет искусственного освещения 94
4.8 Пожарная безопасность 96
4.9 Охрана окружающей среды 97
5 Экономическая часть 99
5.1 Введение 99
5.2 Выбор и обоснование структурной (принципиальной) схемы электропривода. 100
5.3Анализ и оценка научно-технического уровня проекта (НТУ) 102
5.4 Планирование проектных работ 103
5.5 Расчет сметы затрат на проектирование 105
5.5.1 Расчёт оплаты труда работников 105
5.5.2 Расчет капитальных вложений на реализацию проекта 107
5.6 Расчет расходов при эксплуатации электропривода 108
5.6.1 Издержки на ремонтно-эксплуатационное обслуживание электроприводов. 110
5.7 Оценка организационной эффективности 112
ЗАКЛЮЧЕНИЕ 115
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ: 116
ПРИЛОЖЕНИЕ А 118
ПРИЛОЖЕНИЕ Б 119