

Механическая характеристика
Зависимость частоты от момента на валу ДПТ отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
8 Исполнительные двигатели постоянного тока
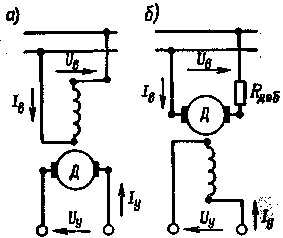
Способы управления. В исполнительных двигателях постоянного тока обмотки якоря и главных полюсов питаются от двух независимых источников тока. Одна из них (условно называемая обмоткой возбуждения) подключена постоянно к источнику с неизменным напряжением Uв , а на другую (обмотку управления) подают напряжение управления Uy только при необходимости вращения вала двигателя. В зависимости от того, на какую обмотку подают управляющий сигнал, различают два способа управления исполнительными двигателями (рис. 9.6): якорное и полюсное.
В некоторых случаях применяют исполнительные двигателя с постоянными магнитами, в которых управляющий сигнал подают на обмотку якоря.
Исполнительные двигатели работают в переходном режиме; для них характерны частые пуски, остановы и реверсы.
Двигатель с якорным управлением. В этом двигателе (рис. 9.6, а)
напряжение управления Uy подают на обмотку якоря; обмотка главных полюсов присоединена к сети постоянного тока с неизменным напряжением Uв . Следовательно, коэффициент сигнала α = Uy /Uв . Для двигателей с постоянными магнитами α = Uy /Uном .
Когда напряжение Uy = 0, ток в обмотке якоря Iу и вращающий момент двигателя М равны нулю, и, следовательно, самоход двигателя исключается. Изменяя напряжение Uy , можно регулировать частоту вращения двигателя. Магнитная цепь исполнительных двигателей выполняется ненасыщенной, поэтому при Uв = const магнитный поток Ф = kфUв , где kф -постоянная, зависящая от параметров обмотки возбуждения (сопротивления и числа витков)
|
Рис. 9.6. Схемы включения исполнительных двигателей постоянного тока при якорном (о) и полюсном (б) управлении |
и магнитного сопротивления цепи машины. Ток якоря
(9.5)
Iу = (Uy - E)/Ry = (αUв - сe kфUв n)/ΣRa,
где Е = сеФn = сe kфUв n - ЭДС, индуцированная в обмотке якоря; Ry = ΣRa — сопротивление цепи якоря. Следовательно, вращающий момент двигателя М = cM kфUв Iy или с учетом (9.5)
(9.6)
М = (cM kф αUв2 - cM се kфUв2п)/ΣRa.
Примем за базовую единицу момент Мк , развиваемый двигателем при n = 0 и α = 1: Мк = cM kфUв2/ΣRa . Тогда относительное значение момента
(9.7)
m = М/Мк = α - се kф n. |
Частота вращения при холостом ходе двигателя и α = 1
(9.8)
n01 = Uв /сеФ = Uв /(се kфUв) = 1/(се kф),
а относительная частота вращения
(9.9)
v= п/п01 = се kф п. |
Таким образом, уравнение механической характеристики принимает вид
(9.10)
m = α - v. |
Из (9.10) следует, что механические характеристики двигателя при различных значениях а прямолинейны и параллельны (рис. 9.7, а). Решая (9.9) относительно v, получаем уравнение регулировочной характеристики
(9.11)
v = α - m. |
Регулировочные характеристики при различных значениях m также прямолинейны и параллельны (рис. 9.7,б).