

38. Нейтральные электромагнитные реле переменного тока.
39. Поляризованное реле.
В поляризованных реле кроме основного потока, создаваемого катушкой, действует дополнительный поляризующий магнитный поток, который создается установленным в реле постоянным магнитом. Благодаря поляризующему потоку направление электромагнитного усилия, действующего на якорь, изменяется в зависимости от направления тока в катушке.
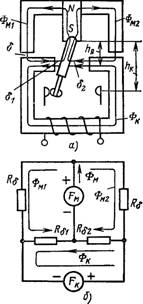
Рис. 9.9. Поляризованное реле: а — магнитная система; б — схема замещения магнитной цепи
Контактные системы могут иметь различные исполнения (рис. 9.10). При подаче в обмотку реле тока такого направления, что поляризующий поток и поток катушки складываются у правого рабочего зазора (рис. 9.10, а), происходит размыкание левого контакта и замыкание правого. При отключении тока снова замыкается левый контакт (однопозиционная настройка с преобладанием). На рис. 9.10,6 показана система с двухпозиционной настройкой. Здесь бК1 и бК2 — расстояние неподвижных контактов от осевой линии симметрии реле. Положение контактов зависит от полярности предыдущего импульса тока.
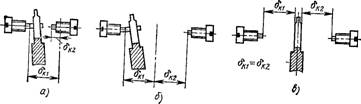
Рис. 9.10. Исполнения контактных систем поляризованного реле
Якорь, укрепленный на плоской пружине (рис. 9.10, в), при обесточенной обмотке находится в нейтральном (среднем) положении. В зависимости от полярности тока катушки замыкается левый или правый контакт. После отключения тока якорь возвращается в нейтральное положение. В практике наиболее широко распространены реле типа РП, допускающие частоту переключений до 200 в секунду при МДС срабатывания 1,5—2 А. Контактное нажатие при отсутствии тока в обмотке, длительный ток контактов 0,2 А, напряжение коммутируемой цепи 24 В. Поляризованные электромагнитные реле имеют следующие преимущества перед нейтральными: 1. Выходной параметр (состояние контактной системы) зависит от полярности управляющего импульса, что расширяет функциональные возможности реле. 2. Реле могут управляться кратковременными импульсами тока. 3. Замкнутое состояние контактов сохраняется после окончания управляющего импульса, что позволяет использовать реле как элемент памяти. 4. После срабатывания не потребляется мощность для удержания якоря в притянутом положении. 5. Высокая чувствительность и высокий коэффициент усиления по мощности. 6. За счет положения упоров можно осуществлять однопозиционную, нейтральную и двухпозиционную настройку реле. Развитие конструкции электромагнитных и поляризованных реле идет в направлении уменьшения массы, размеров, увеличения надежности и удобства монтажа на платах. Микроминиатюризация элементов автоматики привела к созданию электромагнитных реле с улучшенными массогабаритными характеристиками и повышенной долговечностью. Микроминиатюрные реле [9.6] имеют магнитные и контактные системы, располагаемые в герметичном кожухе, заполненном сжатым сухим чистым воздухом или с примесью гелия. Внутренние компоненты реле выполняются из материалов, которые в процессе длительной эксплуатации не выделяют паров газов.